
NVIDIAはROS World 21において、ROS開発者コミュニティに高性能な認識テクノロジを提供するための最新の取り組みを発表した。この取り組みにより、製品開発の加速および性能の改善が可能になり、最終的にはROSをベースとしたロボティクスアプリケーションに最先端のコンピュータービジョンとAI/ML機能を組み込むという課題を簡素化できるようになる。また、ロボティクス向けのソフトウェア プラットフォームであるNVIDIA Isaac SIMの一般提供も間もなく開始する。
NVIDIA Isaac ROS GEMsについて
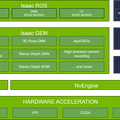
NVIDIA Isaac ROS GEMsは画像処理とコンピュータービジョンを含むパッケージとなっており、そのなかには、NVIDIA GPUとJetson向けに高度に最適化されたDNNベースのアルゴリズムも含まれている。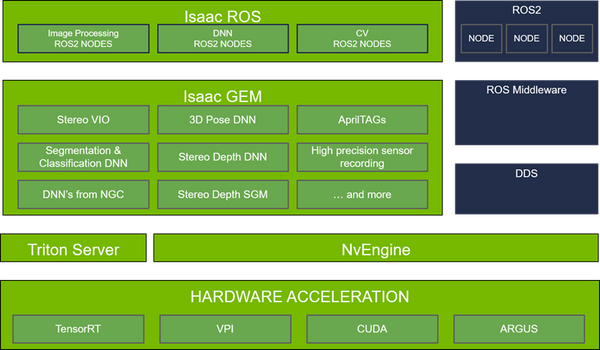
クラス最高の精度と最適化した「Stereo Visual Odometry」を利用可能
自律マシンが環境内を動き回るときには、自らがどこにいるのかを追跡していなければならない。Visual Odometry(自己位置認識)はカメラとスタート地点との相対的な位置関係を推定することで、この課題を解決する。Isaac ROS GEM for Stereo Visual Odometryにより、ROS開発者はこのパワフルな機能を利用することができる。
このGEMはステレオカメラによるリアルタイムの自己位置認識ソリューションとして、最高の精度を実現する。広く使用されているKITTIデータベースを用いたときの公表結果は、こちらから確認できる。精度が非常に高いだけでなく、きわめて速く動作する。実際、Jetson AGX XavierでHD解像度(1280×720)のSLAMが、リアルタイム(60fps以上)で実行できるようになっている。
すべてのNGC DNN推論モデルをROS開発者が利用可能に
開発者はNGCで入手可能な数多くのNVIDIA推論モデルをすべて利用できるだけでなく、一連のROS2パッケージであるDNN Inference GEMを使って独自のDNNを利用することもできる。事前にトレーニングされたモデルのさらなる調整、あるいはカスタムモデルの最適化はNVIDIA TAO Toolkitで行うことができる。調整後、これらのパッケージはTensorRTまたはNVIDIAの推論サーバーであるTritonを通じて展開する。NVIDIAの高性能推論SDKであるTensorRTを活用したノードを利用することで、最適な推論性能が得られる。TensorRTが希望するDNNモデルに対応していない場合には、NVIDIA Tritonを使ってモデルを展開することができる。
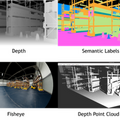
また、このGEMはU-NetとDOPEにネイティブ対応している。TensorRTをベースとするU-Netパッケージを使えば、画像からセマンティックセグメンテーションマスクを生成することができる。また、DOPEパッケージを使えば、検知されたすべての物体の3D姿勢推定が可能となる。このツールによりROSアプリケーションに高性能なAI推論を最速で組み込むことが可能になる。
NVIDIA Isaac SIMの一般提供版リリース
2021年11月より入手可能となる、Isaac Simの一般提供版のリリースは、開発者がこれまでで最も利用しやすいリリースとなる。UI、性能および有益なビルディングブロックに数々の改良を施したリリースでは、より良いシミュレーションをこれまでよりもずっと速く構築できるようになる。また、ROSブリッジの改良と、より多くのROSサンプルで、開発者はROS開発をより容易に行えるようになる。
【2021年11月に予定されている「2021.2」リリースの特徴】
■性能の向上、メモリ使用量の削減、および立ち上げ時間の短縮
■Occupancy Map GenerationとURDF Importerの改良
■新しい環境の追加: 大型の倉庫、オフィス、病院
■新しい Python ビルディング ブロックによる、ロボット、オブジェクト、環境との連携
■ROS/ROS2 Bridge、Depth ポイント クラウド、LiDAR ポイント クラウドの性能向上
■サンプルのアップデート
・ROS2でのマルチロボット ナビゲーション
・JupyterでのDomain Randomizationを使ったSDG
【動画】ROS MoveITを使ったFrankaの関節制御
Isaac Simからのプロダクションデータセット
自律動作ロボットにはその認識スタックを実行する多数のAIモデルのトレーニングを行うための、大規模で多様なデータセットが欠かせない。現実世界のシナリオからこのようなトレーニングデータをすべて入手しようとすれば、桁外れな費用が必要になり、危険がはらんでいるケースもある。Isaac Simが提供する新しい合成データワークフローは、自律動作ロボットの安全性と品質の問題に対処可能な量産クオリティのデータセットを構築することを目的としている。
データセットを構築する開発者はシーン内の物体、シーン自体、光、および合成センサーの確率分布を管理することができる。また、きめ細かい管理によって、まれにしか起こらないものの、きわめて重要な事例もデータセットに含めることができる。このワークフローはバージョン管理とデバッグ情報に対応しているため、監査や安全の目的でデータセットを正確に再現することができる。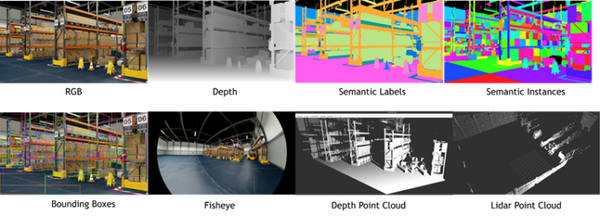
Isaac ROSの導入に関心のある開発者は、以下のサイトで詳細を確認できる。また、ROS World 21のNVIDIAバーチャルブースでは、Isaacについてのテクニカルプレゼンテーションを確認できる。さらに11月8日から11日まで開催されるNVIDIAのバーチャルカンファレンス、GTCでも NVIDIA Isaacやロボティクス、エッジ コンピューティングに関するセッションを含め、500以上のセッションに無料で参加可能。