


今後、あらゆるものが自律して動くようになるとされている。それと同時に、あらゆる自律的なものには高度なリアルタイム認識が必要になるだろう。
NVIDIAは、Open Robotics(旧 Open Source Robotics Foundation)と、ROS(Robot Operating System)開発者コミュニティに一連の認識技術を提供する最新の取り組みを発表した。
NVIDIAの「JetsonエッジAIプラットフォーム」および GPUベースシステム上での「ROS2のパフォーマンス高速化」、ならびにOpen Roboticsの「Ignition Gazebo」と「NVIDIA Isaac Sim on Omniverse」とのシームレスなシミュレーション相互運用の実現に向けて合意した。
同取り組みは、ROSベースのロボティクス アプリケーションに最先端のコンピュータービジョンや、AIおよび機械学習の機能を組み込もうとしている開発者にとって、開発時間の短縮とパフォーマンス向上につながることが期待できる。なお、このコラボレーションの成果として生まれるソフトウェアは、2022年春にリリース予定だ。
Open Roboticsの CEO であるブライアン ガーキー(Brian Gerkey) 氏は、次のように述べている。
Open Robotics CEO Brian Gerkey氏
ホストCPUのオフロードを目的とする演算機能を搭載したハードウェアプラットフォームを利用するROS開発者が増え続ける中、ROSはそうした先進的なハードウェア リソースを効率的に利用しやすいように進化しています。NVIDIAのような、AIやロボティクスの分野における豊富なイノベーション経験を持つ、アクセラレーテッド コンピューティングのリーダーとの協業は、ROSコミュニティ全体に大きな恩恵をもたらすでしょう。
Open RoboticsがNVIDIA AIに対応しROSの機能を強化
Jetsonプラットフォームは、ロボティクス開発者によってさまざまなアプリケーションに広く採用されており、ロボットの応答性、安全性、および協調性を高めるために、高性能かつ低レイテンシの処理を実現できるよう設計されている。今回、2つのシミュレーターを接続することにより、ROS開発者はIgnitionとIsaac Simの間でロボットや環境を容易に移動しながら大規模シミュレーションを実行することや、高忠実度ダイナミクス、正確なセンサーモデル、フォトリアルなレンダリングといった各シミュレーターの先進的な機能を利用して、AI モデルのトレーニングやテストのための合成データを生成することが可能になる。
Open Robotics
Jetsonに搭載されたGPUと他のプロセッサー間のデータフローおよび共有メモリの効率的な管理の実現に向けて、ROS2の機能強化を図る。これにより、カメラやLiDARなどのセンサーからの高帯域幅データを、リアルタイムで処理する必要があるアプリケーションのパフォーマンスが大幅に向上することになる。また、Jetsonへのロボットアプリケーションの展開に向けた機能強化に加えて、Ignition Gazebo と NVIDIA Isaac Sim の統合計画にも共同で取り組むとしている。
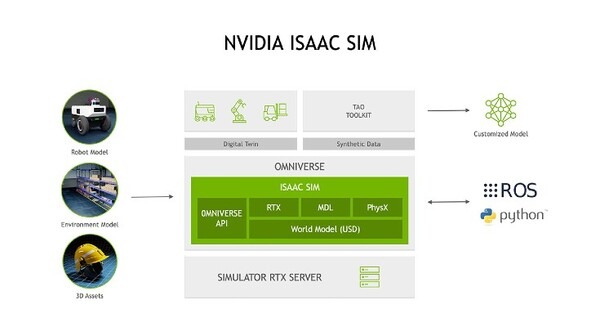
NVIDIA Isaac Sim
ROS1および2を標準でサポートするほか、BlenderやUnreal Engine4などの人気アプリケーションとの接続により、3D コンテンツの極めて重要なエコシステムを備えており、Ignition Gazeboは、現在開催中の DARPA Subterranean Challenge などの知名度の高いコンペティションイベントをはじめとして、ロボティクス コミュニティ全体にわたって長年広く使用されてきた実績がある。
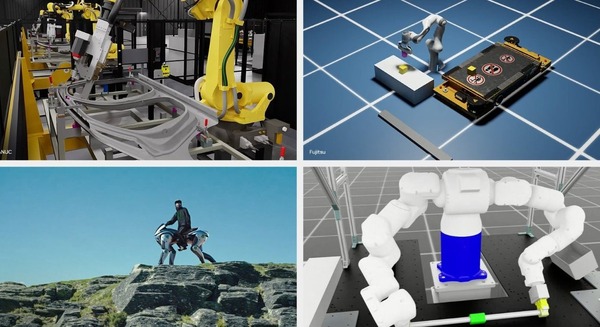
Isaac GEMs、ROS向けに大幅に高速化されてリリース
Isaac GEMs for ROSは、ROS開発者がプラットフォーム上で高性能ソリューションを開発することを容易にするハードウェア アクセラレーテッド パッケージだ。その主眼は、画像処理のスループット改善と、ロボティクスにおいて重要性が高まっている DNNベースの認識モデルに置かれており、ホストCPUの負荷を軽減すると同時に、パフォーマンスの大幅な向上を実現する。
▼ 新しい Isaac GEMs for ROSに搭載されている機能
● 色空間変換およびレンズひずみ補正
● AprilTag 検出
ROS開発者のための Isaac Simの新機能
Isaac Simの最新リリースには、ROS 開発者コミュニティに対するサポートが盛り込まれており、代表的な例として、ROS2 Navigationスタックと MoveIt Motion Planning Frameworkが挙げられる。これらのサンプルはすでに利用可能だ。
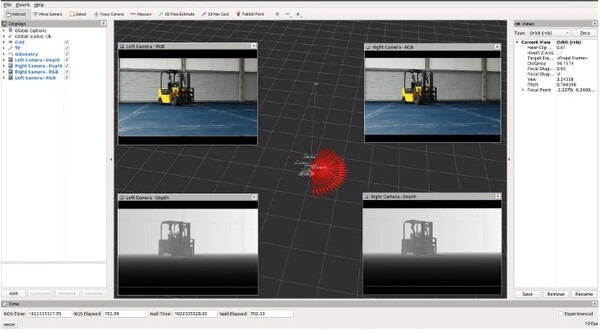
▼ Isaac Sim に含まれる ROS サンプルのリスト
● ROS Stereo Camera
● ROS Navigation
● ROS TurtleBot3 Sample
● ROS Manipulation and Camera Sample
● ROS Services
● MoveIt Motion Planning Framework
● Native Python ROS Usage
● ROS2 Navigation
ック図
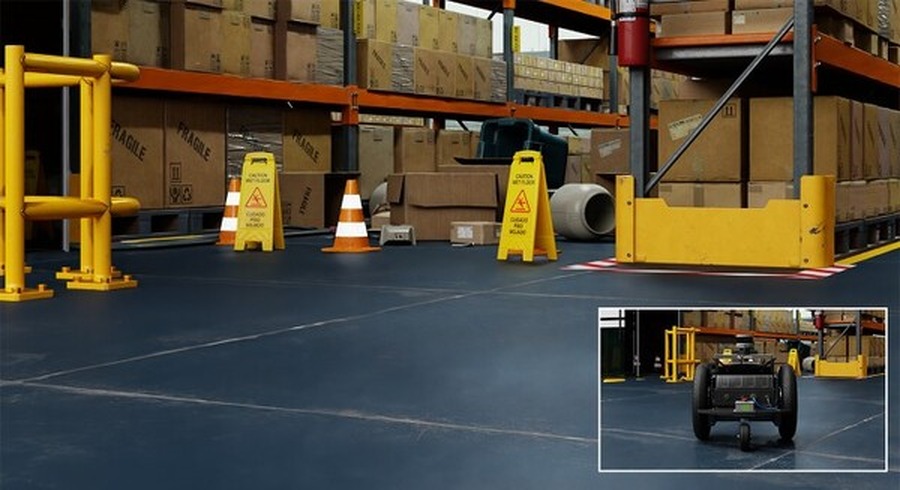
Isaac Simが認識のトレーニング用合成データを生成
Isaac Simは、ロボティクス シミュレーターであることに加えて、認識モデルのトレーニングやテスト用の合成データを生成するための強力な機能群も備えている。ロボット研究者がプラットフォームに認識機能を組み込むにつれて、これらの機能の重要性はさらに高まると考えられる。ロボットは環境認識能力が向上すればするほど高い自律性の実現につながり、結果として人間の介入の必要性が少なくなることは明らかだ。
Isaac Simが生成した合成データセットは、AI モデルを適応させるプラットフォームである NVIDIA TAOに直接送られ、認識モデルをロボット固有の動作環境に適応させることが可能。それにより、ロボットの認識スタックが特定の動作環境で機能するかどうかを確認する作業を、対象となる環境から実際のデータを収集するかなり前から開始できるようになる。ナビゲーションなどの伝統的なロボティクスのタスクを AI ベースの認識スタックに接続、統合することは、ロボット開発者にとって長年の課題だったが、Isaac Simは、合理化されたTAOトレーニングプラットフォームと統合し、ロボティクスと合成データ生成ツールの機能を兼ね備えることにより、このワークフローの課題に対処する。
■【NVIDIA Isaac Sim On Omniverse – Synthetic Data for Perception Model Training】(英語/字幕あり)
オンラインで開催されるROS WorldとGTC2021
NVIDIAは、2021年10月21~ 22日に開催されるROS Worldに向けて準備を進めており、人気のある各種DNNなどJetson開発者向けの新しいGEMをさらにリリースする計画をしている。また、ROS開発者コミュニティをサポートするIsaac Simの新機能も発表予定だ。また、2021年11月8~11日に開催予定のGTCでは、豪華な講演者陣を迎え、多彩なセッションやコンテンツを用意しており、Open Robotics の CEO/共同創業者であるブライアン ガーキー(Brian Gerkey)氏のプレゼンテーションをはじめとするロボティクス開発者向けトラックのほか、NVIDIA Jetson、Isaac ROS、Isaac Sim、Isaac GYMなどをテーマとするセッションも予定している。
ROS関連記事(ロボスタ)