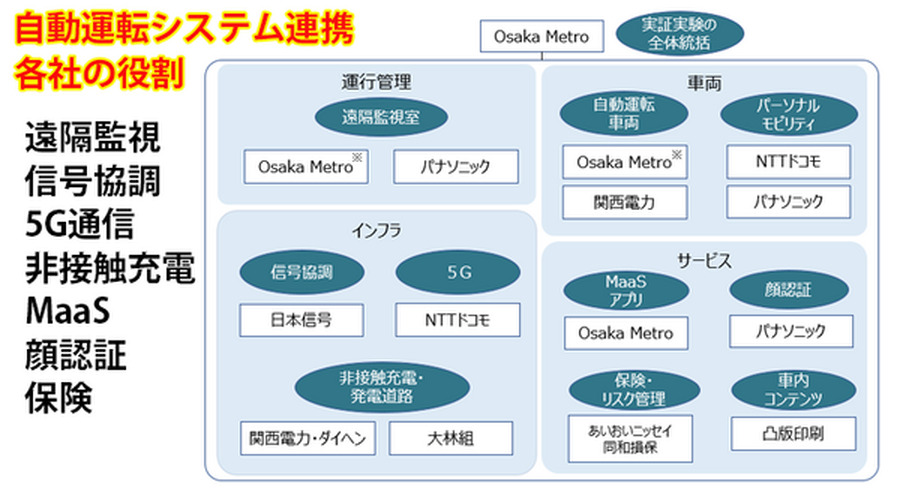




2022年3月1日~4月26日に大阪市高速電気軌道株式会社(大阪メトロ)やパナソニック、NTTドコモ、関西電力など10社は、自動運転バスの走行および遠隔監視業務の共同実験を行っている。自動運転バスと自動運転タクシー、モビリティ、自律搬送ロボットがシステム連携する実証実験を実施している。遠隔管制システムがAPI連携し、計4種類の自動運転車両を遠隔監視する例は過去に例を見ない。
ソフトバンクの子会社のBOLDLY株式会社(ボードリー)やティアフォーなども技術協力している。
この実証実験は、2025年の「大阪・関西万博」の会場内外の交通手段として、「レベル4」(制限区域内での自動運転)を見据えた自動運転車両を核とする次世代都市交通システムの提供を目指して実施するもの。
大阪メトロやあいおいニッセイ同和損害保険株式会社、株式会社NTTドコモ、株式会社大林組、関西電力株式会社、株式会社ダイヘン、凸版印刷株式会社、日本信号株式会社、パナソニックなどが参画している。
実証実験の場所
場所は、舞洲スポーツアイランドに設けた「舞洲実証実験会場」と、コスモスクエア駅と「舞洲実証実験会場」間の公道で行っている。
1.舞洲スポーツアイランド内「舞洲実証実験会場」(住所:大阪市此花区北港緑地2丁目1)
2.コスモスクエア駅と「舞洲実証実験会場」間の公道
自動運転バスと自動運転タクシーが連携
BOLDLYは、自動運転バス「NAVYA ARMA(ナビヤ アルマ)」(仏Navya社製)2台を同時に走行させる。また、BOLDLYの自動運転車両運行管理プラットフォーム「Dispatcher(ディスパッチャー)」と、「NAVYA ARMA」およびティアフォー社の自動運転システムを導入したタクシー専用車両「JPN TAXI」を接続する。
パナソニックのモビリティや自動搬送ロボットとも連携
更に、パナソニックの遠隔管制システムとAPI連携することで、パナソニック社製のパーソナルモビリティおよび自動搬送ロボットを加えた計4種類の自動運転車両を遠隔監視する。
なお、BOLDLYは、「Dispatcher」で取得した「NAVYA ARMA」および「JPN TAXI」の位置情報を、API連携によりパナソニックの遠隔管制システムに提供している。
大手企業を含む10社が連携
このプロジェクトは、全体統括を担う大阪メトロの他、あいおいニッセイ同和損害保険株式会社、株式会社NTTドコモ、株式会社大林組、関西電力株式会社、株式会社ダイヘン、凸版印刷株式会社、日本信号株式会社、パナソニック株式会社を含む計10社が共同で実施している。
実験内容の詳細
1.概要
万博会場を想定した1周約400メートルのテストコースを整備し、複数台の自動運転車両を運行させることで、自動運転走行の一元管理の課題抽出と、非接触充電による電動モビリティへの充電制御に関するエネルギーマネジメントの技術検証を行い、より渋滞の少ないエネルギー効率のよい次世代都市交通システムの構築に向けた実証を行う。
また、車両の運行を管理する手法・システムを企画し、マネジメントする高度な専門人材の育成を行うとともに、将来の自動運転化による様々な技術・サービスについても活用の可能性を検証する。
2.詳細
1).MaaSアプリ・顔認証
目的地までの移動ルートを検索し、目的地周辺までのオンデマンド交通及び目的地まで移動する小型モビリティの提案・予約を行う。オンデマンド交通乗車時は、顔認証で乗り込む。
2).自動運転
公道における自動運転レベル2の走行や敷地内のテストコースにおける自動運転レベル4相当の走行を行う。
3).車内コンテンツ
利用者が移動時間を楽しめるコンテンツを、5Gを用いて配信する。車内でのホスピタリティを向上させることで、快適な車内環境を実現する。
4).低速自動運転・パーソナルモビリティ
目的地までは、MaaSアプリで予約した低速自動運転モビリティやパーソナルモビリティを用いて、歩行者と混在する環境下で移動する。
5).モビリティの管理
5G通信環境の高速・大容量・低遅延なデータ通信により、遠隔監視者一人で低速自動運転モビリティやパーソナルモビリティなど様々なタイプのモビリティの運行状況を一つのシステムで一元的に管理する。異常時には遠隔監視者からの操作で車両を制御する。また、電動モビリティのバッテリー残量の状況把握等も行う。モビリティの台数が不足することを防ぐために、在庫の管理を行うなど、モビリティ全体での交通の最適化を行う。
6).信号協調
AI判定によるセンシングと5Gによる路車間通信を活用し、交差点における死角車両等との衝突回避するための安全情報、信号切替タイミングの事前通知等により、安全な自動走行をインフラから支援する。
7).道路での非接触充電・発電
路上で電動モビリティの非接触充電を自動的に開始し、充電スポットでの充電頻度を減らす。また、電動モビリティへの非接触充電による充電量のデータ取得を行い、充電制御に関するエネルギーマネジメントの検証を行う。また、太陽光発電を行う路面や自然に配慮した自然循環配慮型舗装を行う。
8).保険・リスク管理
様々なモビリティが走行することにより生じるリスクだけでなく、サービス提供、運行管理におけるリスクも幅広く検討し、複数の車両に対しての迅速な対応サービスを実現する。