
「横浜ロボットワールド2022」が12月7日、8日の日程で、パシフィコ横浜にて行われた。主催は横浜ロボットワールド実行委員会。パシフィコ横浜の1ホールのみを使ったコンパクトな展示会だが、ロボットの活用がまだ進んでいない分野でのロボット導入拡大に関するセミナーや、何かと話題の文章生成言語モデル「GPT-3(Generative Pretrained Transformer – 3)」のような大規模言語モデルのロボットへの展開をテーマにした専門セミナーなども行われた。本誌では展示の一部をご紹介したい。
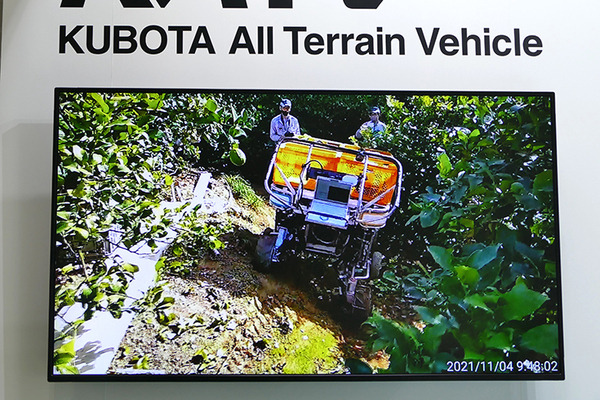
クボタ 斜面・不整地でも水平を保てる4脚車輪ロボット「KATV」

農機メーカー国内最大手のクボタは全地形対応型の4輪搬送用ロボットを初公開した。幅116cm、長さは155-234cm。重量は340kg。山間部など不整地(凹凸のある場所)、路面でも脚を曲げ伸ばしすることで、荷物を搭載するデッキ部分を水平に保って走行できる。
ガソリンエンジン駆動、油圧アクチュエータで動作する。次世代油圧駆動ロボットを研究している立命館大学 玄相昊研究室と共同開発しているもの。
荷台では240kgの荷物を運ぶことができる。傾斜地での可搬重量は120kg。テザーを使った追従も可能
農業、林業、建設業など、傾斜地や不整地で荷物を運ぶ必要があるところを対象として2023年以降の販売を予定する。残念ながらデモはなく、静展示とビデオ紹介のみだった。
CANによってステアリング角度と車速を外部からコントロールできる。なお、初めてのお披露目の場所として農業関連の展示会ではなく、今回の「横浜ロボットワールド2022」を敢えて選んだ理由は、「従来とは異なる領域と繋がりたいから」とのことなので、興味を持った方は積極的にコンタクトしてみると良いかもしれない。
スギノマシン 小型作業ロボット

スギノマシンは、クローラ式小型作業ロボットほかを出展。重さは約394kg。従来機よりも軽量化した。長さ150cm、5軸のアームは最大100kgを持ち上げることができるとのこと。連続稼働時間は4時間。20cmの段差乗り換えができる。
アーム先端はバルブ開閉などが可能で、転倒復帰に用いることもできる。特殊環境下での遠隔作業を想定している。
遠隔協同子育てロボット「ChiCaRo」

2017年創業の電気通信大学発ベンチャー・ChiCaRo(チカロ)は、自社で開発中の遠隔協同子育てロボット「ChiCaRo」を出展。
核家族の0~3歳児の育児において「ほんの少しの時間だけでも子供の面倒を見てくれないか」と思うことは多い。そういうときに遠隔地に住んでいる親などに短時間だけロボットに入ってもらって子供の気を引いたり見守ったりすることで、遠隔から育児をサポートしてもらうというコンセプトのロボットだ。
ロボットのモニターを通した会話のほか、移動もできるので身体を使った遊びもできる。また、保育士や小児科との連携なども視野に入れているという。
竹田印刷 RoBoHoN アプリ
■動画
印刷地形のほかソリューション事業を手がける竹田印刷はシャープのコミュニケーションロボット「RoBoHoN(ロボホン)」の代理店の一つ。RoBoHoNを使った介護レクリエーションそのほか生活支援の取り組みを紹介していた。たとえばロボットが絵本を読んでくれるといったものだ。
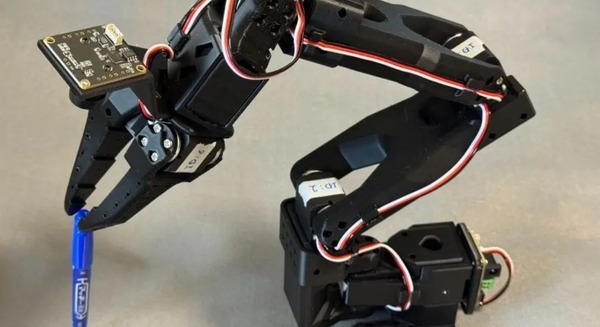
「柔・剛」の切り替えで様々なモノを扱えるハンド
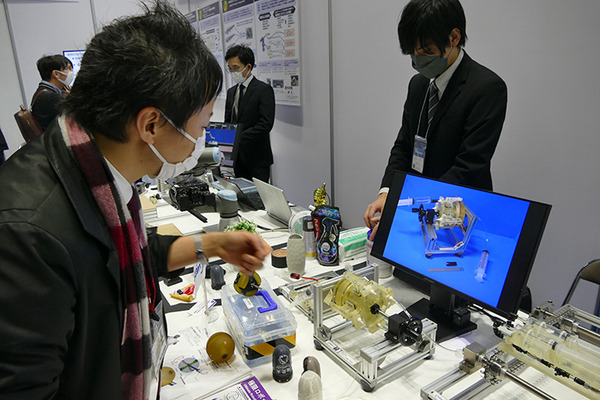
パナソニックホールディングスと東北大学 多田隈建二郎研究室ほかは、NEDO事業にてエンドエフェクタ(ロボットハンド)を開発中だ。指先に相当する部分にベルトやヘラなどを使って「つまみあげ」や「すくい取り」などによって様々な物体を扱えることを狙っている。
特にこのプロジェクトでは、単に様々な種類のものを扱うだけではなく、一つの物体において状態や形状も変化する物体を扱うことを狙っており、「変種変様」(プロジェクトによる造語)な対象を扱えるハンドの開発を行っている。
主な対象分野は食品。たとえば、最低限の力でイチゴを傷つけずにピックアップし、姿勢を変えて、ケーキの上に盛り付けるようなことができるという。
■動画
また、柔らかいスポンジや硬いウレタンなど、硬さが異なる物体に対しても、都度都度、設定を変えることなく、同じハンドで操作できる。他にも、雑誌をすくいあげてひっくり返すようなこともできるとのこと。
■動画
このほか、ヘラの剛性を簡単に変えられる機構なども提案されていた。たとえば多くの人が実際にやってみたことがあると思うが、プラスチックの下敷きをちょっと曲げると、多少重量のあるものも持ち上げることができる。それと同じ理屈で、ヘラの端を少したわめたり緩めたりすることで、ヘラの先の硬さを切り替えて、モノを運べるのではないかという提案だ。もともとは細胞シートの搬送などを用途として考案したものとのこと。
■動画

この「柔剛切り替え」は多田隈研究室のキーワードの一つだ。「ジャミングフィンガー」は数珠を繋げた紐のような1次元の機構で、ワイヤーを引っ張ることで、ぐにゃぐにゃにしたり、固くしたりすることができる。例えばこれを指として使うことで物体を把持することもできる。
このほか、同じく流体を使うことで、表面全体の硬さを変えて物体のサポートができる「無限回転式柔剛切替メカニズム」の研究開発も進めている。将来は小型化してロボットハンドへの適用や、対象に柔らかくなじみつつも適度に硬くしてサポートもできるクローラーベルト等へ適用できるという。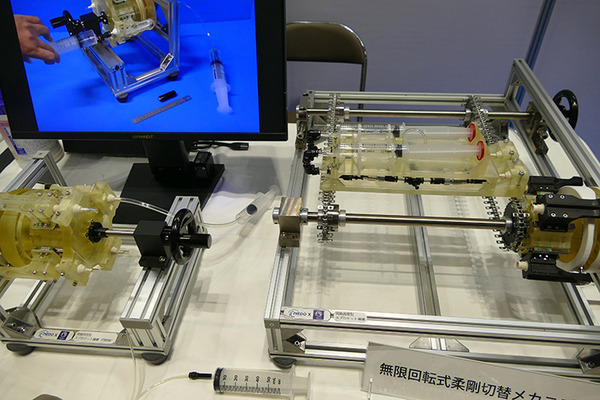
球面歯車のボールジョイント
■動画
山形大学 多田隈理一郎研究室も、向いのブースで球面歯車と鞍状歯車を使ったボールジョイントの展示を行っていた。4個のモーターで無制限な回転3自由度を実現する。歯車を球面上に配置することで従来の球面モータに比べて動力伝達効率が高く、確実に動力を伝達できる。先頃、Twitterで大いにバズったので、記憶にある方も多いと思う。
■動画
回転軸は1点で直交するので、ロボットの関節をコンパクトに構成できる。多田隈氏によれば、ロボットの関節のほか、出力軸にカメラを仕込むことで「目」にも使えるのではないかとのこと。技術詳細はこちらのスライドに詳しい。
THK「SEED Solutions」によるサービスロボ各種

THKブースでは、THKのサービスロボット開発システム「SEED Solutions」を用いた案内ロボットなどがデモを行って、様々な分野での活用の可能性をアピールしていた。

吉忠マネキンは、THKのサービス用ヒューマノイド「SEED-noid」を中身に、自社製の外装を付けた動くマネキンロボット「QLOGO」をデモ。カメラで人を認識、簡単な会話を行うこともできる。まだ実際の引き合い・活用例はないそうだが、人目を集められる外見であることは確かだ。
■動画
エレベーターのスイッチも押せる アイオロスロボット
■動画
アイオロスロボティクス(Aeolus Robotics)株式会社は「アイオロス ロボット」のデモを行なっていた。エレベーターのボタンをロボットが押すことで、システム連携しなくてもフロア間移動ができるとのこと。RaaS(Roboti as a Service)での介護施設やオフィスビルでの活用を想定している。
巻尺を使った伸縮アクチュエータ
■動画
2020年創業のスタートアップ・RoboSapiensは巻尺を使った伸縮アクチュエータ「BambooShoot Actuator」を出展。スイッチを押すような作業を省スペースで実現する。使い方次第では有効だろう。
ロボットの見方 森山和道コラム
横浜ロボットワールド2022