東日本旅客鉄道株式会社(以下、JR東日本)とKDDI株式会社は防犯カメラの映像データをAI分析し、配送ロボットが自動で混雑回避や回遊販売を行うフードデリバリーサービスの実証実験を2023年1月11日からJR目黒MARCビルにて開始することを発表した。
実証ではビルに設置された防犯カメラの画像をAI解析し、ロボットに人の密集度を伝えることで最適なルートで移動ができるか、配送サービスを用いて検証する。なお、防犯カメラ画像は通常のビル管理に資する防犯目的以外では保存されず、個人を特定できないデータに即時変換し分析を行う。また分析に利用したデータは分析完了後、速やかに破棄される。
オフィスワーカー、エキナカ商業施設の商品を回遊販売
実証ではJR目黒MARCビル内で勤務するオフィスワーカー向けに事前に注文されたお弁当を時間通りにオフィスフロアまで配送するサービスのほか、JR品川駅のエキナカ商業施設「エキュート品川」で販売しているお菓子・軽食を、ビル内(ラウンジ/ロビー/フロアなど)の人の多い場所に移動して回遊販売するサービスを試験的に提供する。お弁当配送の際は密集度が低いルートを、回遊販売では販売機会を逃さないよう密集度が高いルートを走行する。
配送サービスの流れ


配送サービスの商品
今回の実証実験では週替わりで「エキュート品川」で取り扱っているお弁当を配送する。


都市OSとロボットプラットフォームを連携
今回の実証は「高輪ゲートウェイシティ(仮称)」のまちづくりをコアとしてJR東日本とKDDIが取り組む、場所や時間にとらわれない働き方・くらし方を創出する「空間自在プロジェクト」の一環。ビルに設置している防犯カメラなど、都市や街の設備が持つデータを収集・分析するデータ連動基盤(以下、都市OS)とロボットの位置情報管理や走行の制御および設備との連携を行うロボットプラットフォームとを連携させることで、これまでロボット単独ではできなかった高度なサービスの実現や利用者の需要に柔軟に対応できる環境の構築を目指す。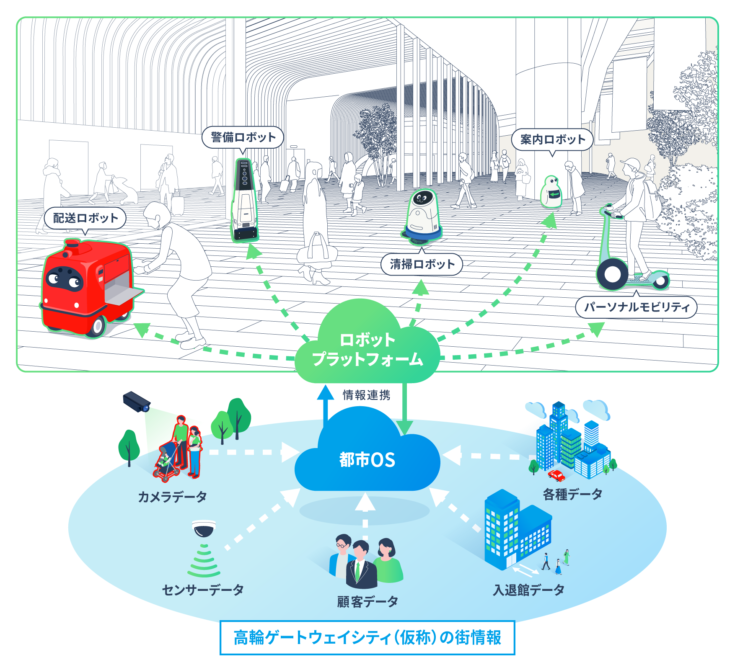
検証項目
1.人の密集検知による走行ルートの選択
都市OSがAI画像解析により人の密集度を算出し、ロボットプラットフォームに連携。ロボットプラットフォームにて最適なルートを選択し、ロボットに指示する。実証ではお弁当配送の際は密集度が低いルートを、回遊販売では販売機会を逃さないよう密集度が高いルートを走行する。将来的には人の密集度に加えて購買データなどのさまざまなデータと連携させることにより、さまざまなサービスの需要に合わせた効率的なルート選択の実現を目指す。
2.メーカーが異なる複数ロボットの協調制御
配送ロボットに加え、メーカーが異なる警備ロボットも稼働する。エントランスロビーで配送ロボットと警備ロボットが稼働する中、配送ロボットの走行を優先させる協調制御が可能か検証する。実証を経て、複数ロボットの協調制御の検討を深度化し、将来的にはさまざまなメーカーのロボットが自由に走行できるまちづくりを目指す。
3.エレベーターとの連携によるフロア移動
ロボットプラットフォームとエレベーターとの連携により、ロボットが人の介在なくエレベーターを利用し、異なるフロアへ配送することが可能か検証する。実証を経て、ロボットサービスとさまざまな設備との連携を進めることで、将来的にはロボットがより多くの場所に行けるようになることを目指す。
今後の展開
今回検証したロボット配送サービスに加え、今後も都市OSとさまざまなサービスとの連携を検討していく。駅や街の各施設で得られたさまざまなデータをプラットフォーム上で繋ぐことで、AI画像解析による清掃・警備の最適化による街運営の効率化や、ビジネスワーカーや来街者の属性や嗜好に応じたサービス提供など、街の価値向上に向けた新たなサービスの創造に取り組んでいく。