NECは物流倉庫のDX推進を加速する3つの最新ロボティクス技術を発表した。発表に伴い、2023年3月3日、報道関係者向けに説明会を開催し、新技術のデモを公開した。NECは今後、物流倉庫や工場などのロボット作業で新技術の検証を進め、2024年度中の実用化を目指すとしている。
説明会の冒頭では、データサイエンス研究所所長の酒井氏が登壇し、NECの物流DXのポイントとコンセプトを述べ、3つの新技術を紹介した。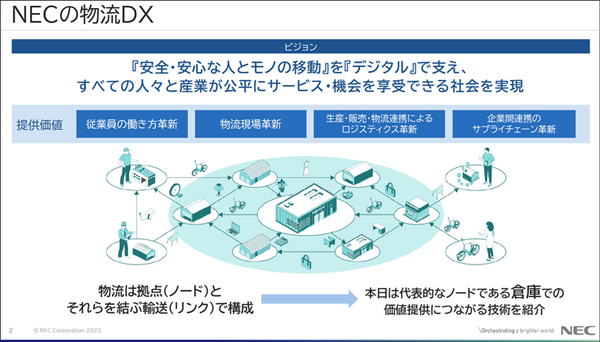

NECが物流DXを加速する3つの新技術
紹介した3つの技術とは、
・世界モデルを採用した臨機応変にモノをつかむハンドラーロボット技術
・リスクセンシティブ確率制御による搬送ロボットの高度化技術
・大量のAIカメラ映像をエッジとクラウドで効率的に分散処理できる「アプリケーションアウェアICT技術」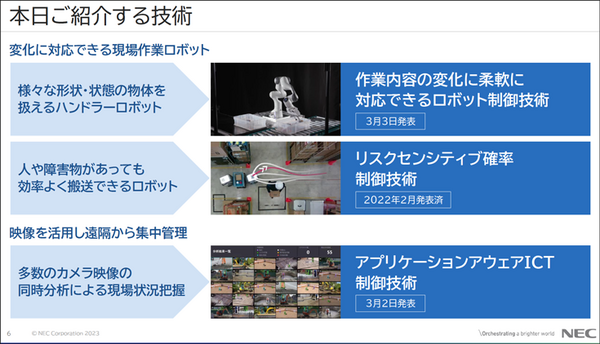
「世界モデルを採用した臨機応変にモノをつかむハンドラーロボット技術」のデモでは、2台のロボットが用意された。1台のロボットはモノをつかんで商品棚に置き、自律移動でエリア内を移動した。もう1台のロボットは、世界モデルを活用したAIロボットアームを使い、無造作に置かれたモノを的確につかんで別のパレットに整列して置くデモで、デジタルツイン環境によるシミュレーションも公開された。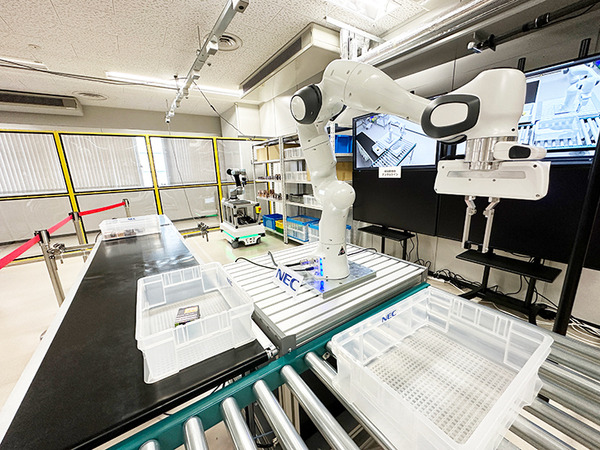
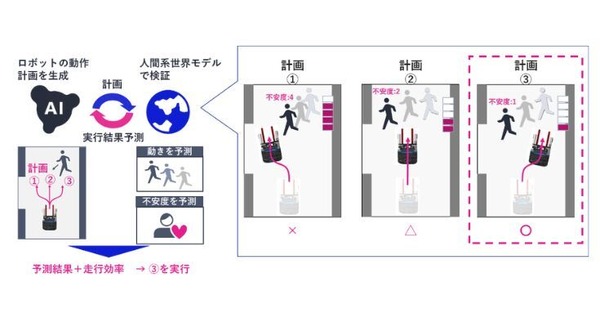
「リスクセンシティブ確率制御による搬送ロボットの高度化技術」は、NEC製の2台の搬送ロボットが協調して自動搬送し、周囲の障害物や人を避けて安全に自律走行する動画が公開された。
「大量のAIカメラ映像をエッジとクラウドで効率的に分散処理できるアプリケーションアウェアICT技術」は、映像から重要な部分をエッジAIが判断してクラウドに送り、クラウドが監視して危険性を判断、注意が必要な場合は通知するシステム。エッジとクラウドで分散する点が新しい。
世界モデルを採用した臨機応変にモノをつかむハンドラーロボット技術
物流倉庫や工場などでロボットの導入が進んでいるが、一定のルートを自動走行する搬送ロボットや、一定の形状のモノをつかむロボットアームなど、同じ作業を繰り返す単純な業務の自動化はある程度ロボットで対応できる範囲が拡大してきた。その一方で、例えばハンドリング作業を行うロボットアームの場合、モノの形状が変わったり置き方によってはつかめなかったり、パレットにアームが衝突するなど、その場での応用が効かないという課題があった。
NECは物流現場における、このような課題を克服するロボットAI技術が必要と判断。作業内容やレイアウトの頻繁な変化にも柔軟に対応できる「ロボット制御AI」を開発した。
今回発表した技術のポイントは「世界モデル」をロボット制御に応用したこと。事前学習の時間を大幅に短縮できるとともに、扱う物品や作業レイアウトなどの環境の変化に柔軟に対応することが可能となる。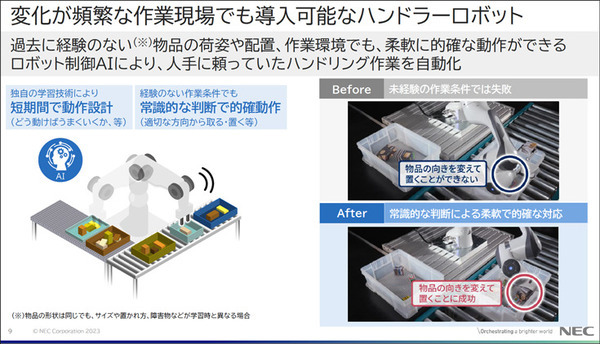
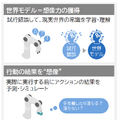
「世界モデル」とは
AIなどの機械学習の分野では「世界モデル」という考え方が注目されていて、国内外で研究開発が盛んに行われている。世界モデルとは、ある行動の結果として実世界で何が起こるかを、現実に試すことなく予測する技術。モノをつかんだり、置いたりするとき、人間は過去の経験により蓄積した常識に基づき、行動の結果を想像して適切に行動している。同様のことをロボットで実現するため、これらの常識を網羅的に学習させたAIモデルが必要となる。世界モデルを実装したロボットは、モノの形状や置き方を認識して、予測判断を行い、常識に照らし合わせて最適な行動を決定する自律制御技術。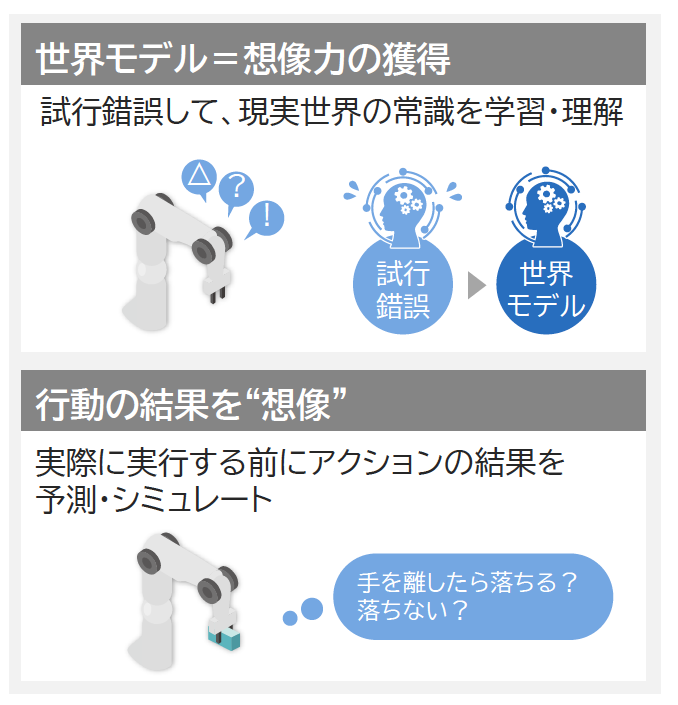
今回NECが開発した「ロボット制御AI」は、この世界モデルを世界で初めてハンドリング作業に応用したもので、過去に試したことのない作業条件でも失敗の少ない最適な動作を自律生成し、実行することができる。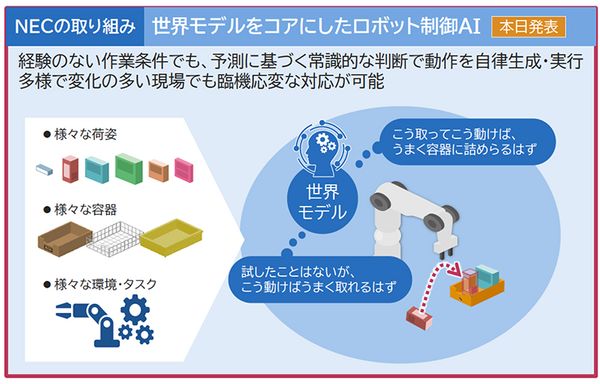
これにより、学習したものと異なるサイズ・形状で、不規則に置かれた物品に対しても、的確につかんで所定の位置と向きに正しく置くことができる確率が高くなる。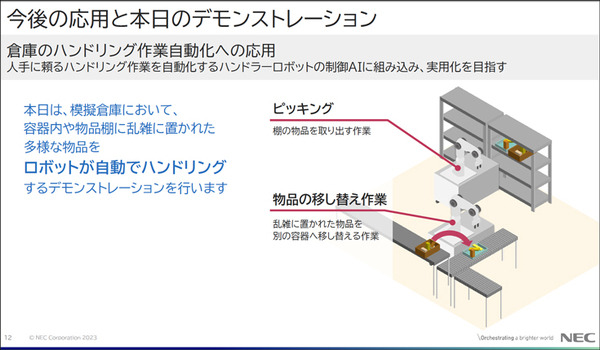
■世界モデルを採用した臨機応変にモノをつかむハンドラーロボット技術
実行時の作業条件に応じて成功率95%の動作を生成
例えば、物流等のピッキング分野では、乱雑に置かれたさまざまな種類の物品を箱に整列して詰めるハンドリング作業をロボットで自動化したいというニーズがあるが、これまでは物品の種類や置き方、箱の中の状態などの作業条件に応じて、多くのデータを用意してAIに学習させて初めて、ロボットが落とさないように物品をつかみ、指定された場所に置くなどの動き(タスク)が生成できていた。また、学習していないモノや置き方については作業の成功率が低下する傾向にあった。
同社のプレゼンによれば、このような従来から行われてきたロボット制御では、物理特性を考慮したシミュレーションでの検証で作業成功率が約70%にとどまっていたという。今回NECが開発した世界モデルを実装した技術では、ロボット制御則の学習に加え、「動作予測モデル」を事前学習する。動作予測モデルは、ロボット動作にある作業を指示したときに、その作業の成否を予測できる世界モデル。
ハンドリング作業を行う際、まず学習済みの制御則によって作業条件の特徴にあわせて生成された複数の動作候補について、実行に移す直前に動作予測モデルで動作の成否を予測し、成功率の高い動作の候補を算出して実行する。これにより、作業条件の網羅的な学習なしで、約95%の作業成功率が達成できることをシミュレーションにより確認した。
■2台同時稼働しているデモの動画
短期間での事前学習
これは機械学習の期間の短縮にも寄与する。多様な物品・作業に対応可能な動作を学習するために、従来は想定される物品の配置や作業のパターンを網羅的に学習する必要があり、現場によっては数万パターン以上の事前学習が必要で、学習に数か月以上を要するケースも少なくなかった。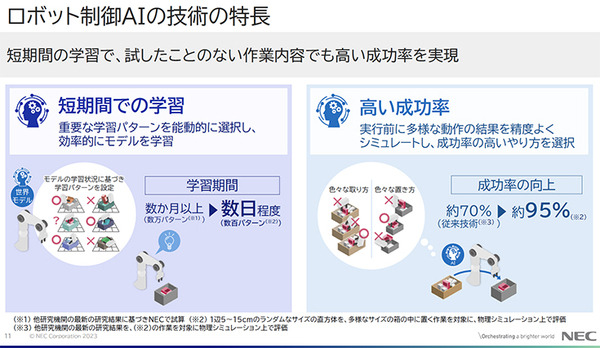
これに対し、NECは2つの方法で事前学習の短期化を実現した。
1つ目は「動作予測モデル」を導入することで、網羅的な学習を不要とした。
2つ目は「動作予測モデル」の学習状況に応じて「次に学習すべき物品の配置や作業などのパターンを設定する能動学習手法」を導入することで、動作予測モデルおよびロボット制御則をより少ないパターン数で学習することを可能とした。
具体的には、前述の数万パターンが必要と述べた例でも、NECが開発中のこのシステムでは数百パターン程度の学習で対応することができ、事前学習の時間を数日に短縮することができると想定されている。
デジタルツインにも重要な要素
NECはデジタルツインも重要な要素として考えている。今回もロボットの作業を実行する前にシミュレーション環境で、思った通りに動作するかを確認することができる。今回、使用したデジタルツインのシステムはNEC自身が開発したもので、将来的にはデジタルツインのシステム自体はNEC提供のものに限らず、汎用的なプラットフォームとも連携できるようにしたい考えだ。
なお、「リスクセンシティブ確率制御による搬送ロボットの高度化技術」と「大量のAIカメラ映像をエッジとクラウドで効率的に分散処理できる「アプリケーションアウェアICT技術」については別の記事で詳しく解説する予定。
■リスクセンシティブ確率制御による搬送ロボットの高度化技術