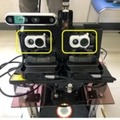

ザクティは、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の「ロボットによる社会変革推進に向けたロボット・AI部事業の周辺技術・関連課題に係る先導調査研究」事業として、悪環境でも人物検出が可能な自動走行ロボット・無人搬送車向け、人物検出用の2眼遠赤外線カメラセンサを試作開発。自動走行ロボットに搭載して実証実験を行った。
ザクティでは映像センシング技術をデジタル映像ソリューションのキーテクノロジの一つとして位置付けて研究開発に取り組んでいる。
夜間や霧などの悪環境においても人物を検出
2024年問題とドライバー不足
少子高齢化による配送ドライバー不足が社会問題化する中、物流業界では労働環境改善のためドライバーの時間外労働の上限規制が適用される2024年問題も差し迫っている。一方で、EC市場の拡大や生活必需品の調達のための配送サービスの需要は大幅に増加しており、物流のラストワンマイルの課題は社会問題化しつつある。
それらの物流課題の解決策として自動走行ロボットの活用が期待されており、様々な実証実験や実用化に向けた道路交通法の改正など官民一体となって推進されている。
2眼遠赤外線カメラセンサをデバイス統合プラットフォームと連携
今回の実証実験では、異機種・複数のロボットやセンサを遠隔で制御・統合管理するブルーイノベーションのデバイス統合プラットフォーム「Blue Earth Platform」(BEP)と接続された4WD小型自動走行ロボットにザクティが開発した2眼遠赤外線カメラセンサを搭載・連携して行った。
自動走行ロボットの自動走行中に2眼遠赤外線カメラセンサが人物を検出すると、BEPを通して停止させるという一連の動きを検証。悪環境でも高精度に人物検出が可能なロバスト性と安全な自動走行の可能性を確認した。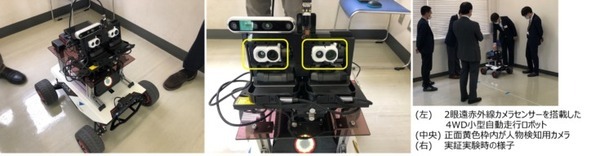
既存の可視カメラセンサやLiDARでは人物の検出が困難な夜間や霧などの悪環境において、開発された2眼遠赤外線カメラセンサを用いることで人物を検出し、さらに人物までの距離も算出することが可能であることを確認。これにより、従来は人物検出が難しいとされていた悪環境下の人物検出精度を向上させ、より安全な自動走行を実現することができる。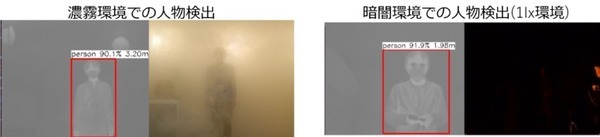
ザクティでは現在ドローン向けの可動式カメラの開発・製造・販売を行っており、同様の技術や製品の自動走行ロボットへの活用を検討している。
今回の研究開発は、自動走行ロボットの活用によって物流業界の抱える人手不足問題の解決を目指すもので、既存のセンサでは難しいとされていた条件下での自動走行を実現し、より安全な自動走行ロボットの走行に寄与するとしている。