

大日本印刷(DNP)と、デジタルツインプラットフォーム「Wisbrain(ウィズブレイン)」展開するUltimatrustは、物流倉庫や飲食店等で稼働する自律走行搬送ロボット(Autonomous Mobile Robot:AMR)の経路を最適化するアルゴリズムと、その導入効果を検証できるシミュレーターを開発した。
組合せ最適化問題を高速で処理する「DNPアニーリング・ソフトウェア」を搭載
「Wisbrain」は、設置した多様な情報機器から取得したデータを集約し、AIで高精度な解析を行うシステム。
今回、このシステムに膨大な選択肢から最適な解を抽出する「組合せ最適化問題」を高速で処理する、量子コンピュータで用いられるアニーリング手法を、GPUを利用した並列計算により高速化したソフトウェア「DNPアニーリング・ソフトウェア(DAS)」を搭載。
これにより、常に変化するAMRや障害物等の位置を把握して最適な移動経路を短時間で計算し、AMRの稼働率を高め、シミュレーターにAMRの台数や稼働領域マップ、経由地等の条件を設定することで、このアルゴリズムの効果を検証することができる。
開発の背景
近年、日本国内ではサービスの多様化に対して労働力不足などにより業務の一層の効率化が急務となっている。そのため、一部の工場や倉庫のみで使用されてきたAMRの用途を広げ、多様な現場に導入する動きが進んでおり、ロボットが得意とする作業を積極的に任せることで、人が担う仕事の幅が広がり、生産性も向上するという実績が増えている。
こうした課題や動向に対してDNPとUltimatrustは、さらなる社会の持続可能性と生産性の向上に貢献するため、両社の技術を掛け合わせ、複数のロボットを同時に効率よく制御することで、AMRの一層の有効活用を促進する。
開発したアルゴリズムとシミュレーターの特長
1:AMRの移動距離を従来手法と比べて約3分の2に短縮
DNPのDASを活用し、現場の環境やロボットの稼働状況等の膨大な選択要素の中から、「AMR同士の衝突回避」や「現場全体での高効率なロボットの動作順序」等の条件を加味して、最適な搬送経路を提示する。
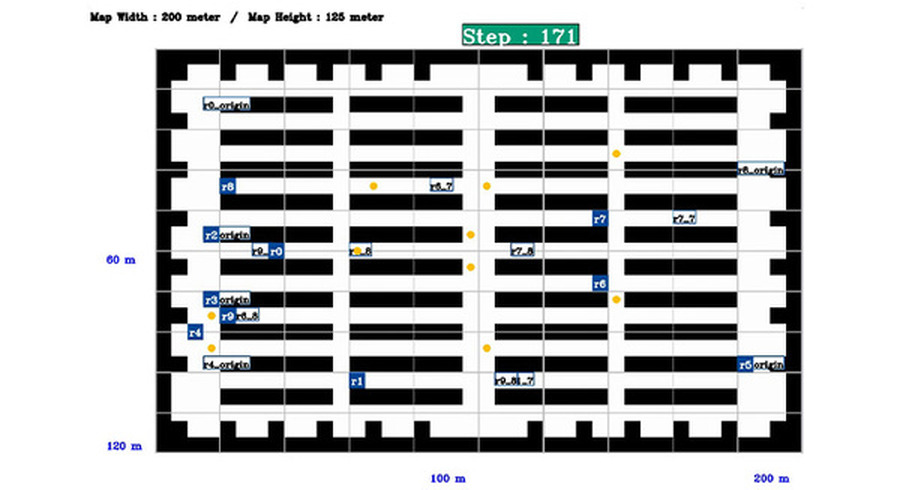
今回の開発にあたり、125×200mの倉庫内でランダムに抽出した8つの経由地を各AMRが通るという条件で、10台のAMRをシミュレーター上で稼働させたところ、最短経路を導くために従来から使われているダイクストラ法と比べて、AMRの移動距離が約34%短縮することができた。
2:突発的に発生した障害物などにもリアルタイムで対応可能
物流倉庫や飲食店等ではロボットの経路上に障害物が突発的に発生する場合があるが、本アルゴリズムでは、「Wisbrain」を通じてカメラやセンサーから得る障害物の情報を活用することで、経路をリアルタイムで再探索することができる。また、障害物の存在を前提に経路を提示するため、衝突や停止の事前防止にもつなげることができる。
3:AMRのさまざまな作業環境に広く対応
物流倉庫や製造工場、飲食店など、AMRが導入されるさまざまな環境に対応可能で、ロボットの稼働効率を高めたい企業・団体等に対して有効としている。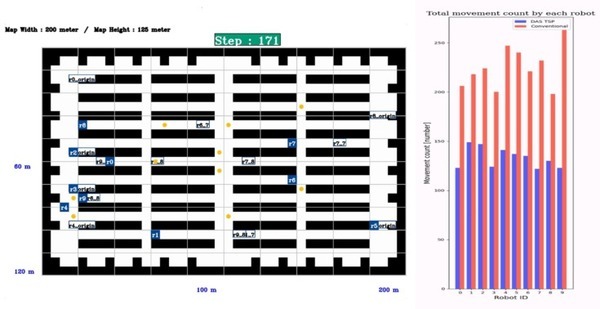
今後の展開について
DNPならびにUltimatrustは、物流倉庫や製造・物流関連の企業、飲食業界等に向けて、PoC(Proof of Concept:概念実証)等を通じて、ロボット導入による効果検証を示していくほか、2023年度中に本アルゴリズムを用いたAMRの経路最適化システムを開発し提供していくとしている。