


JSTムーンショット型研究開発事業 目標3の「活力ある社会を創る適応自在AIロボット群」に関するシンポジウムとデモンストレーションが2023年7月16日に行われた。シンポジウムの一部をレポートしておきたい。
自己効力感を支えるAIロボットを目指して
プロジェクトマネージャーの東北大学 教授の平田泰久氏は最初に「COGY」という足漕ぎ車椅子を紹介した。「あきらめない人向けの車椅子」で、片麻痺の人、両手両足に麻痺が残る人、パーキンソン秒の人でも足漕ぎ車椅子ならば操作できる。
*動画
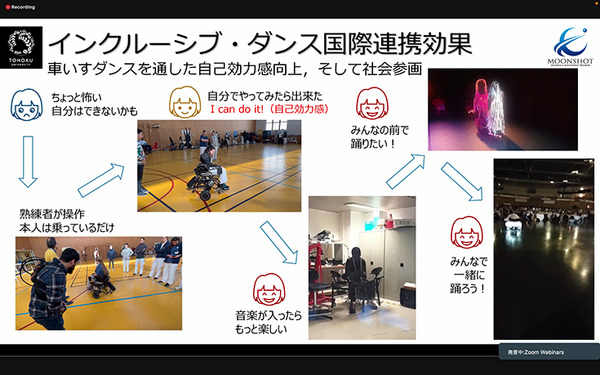
「COGY」にはロボット技術は使われてない。リハビリ用の車椅子だ。だが使っているうちに積極的に外出したり、社会参加する意欲がわいてくる。何か一つデバイスがあることで「まだまだ自分はできるぞ」と思えるようになるのだ。そう考えるようになるきっかけが、この足漕ぎ車椅子だったという。しかも面白いことに、COGY使用をきっかけとして外出しているうちに、なくても杖だけで外出できるようになる人もいたという。
これを「自己効力感」と平田氏らは呼んでいる。自己効力感が高いと「何かできるかも」という気持ちになって積極的になる。センサーやロボットを使って、自己効力感を高める。それがムーンショット・プロジェクト「活力ある社会を創る適応自在AIロボット群」の目標だ。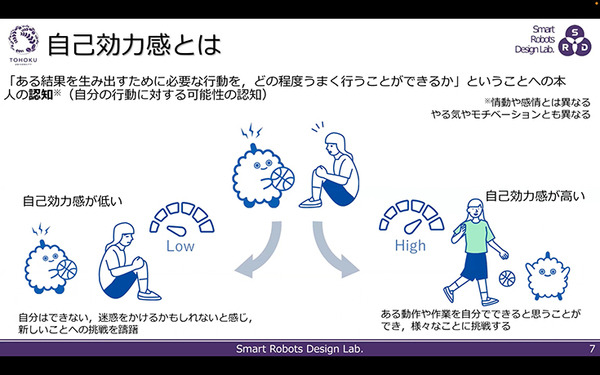
「ムーンショット」とは月にロケットを打ち上げたアポロ計画に由来する。日本では2020年にムーンショット型研究開発制度が始まった。「目標1」から「9」まであり、2050年の未来社会の創造を目指して、アバターロボットや、AIを使って人と共生するロボットなどが研究開発されている。
*動画
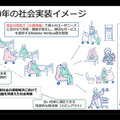
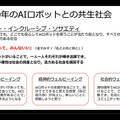
2050年、ロボット利用は当たり前になり、AIは「人生ナビゲータ」に
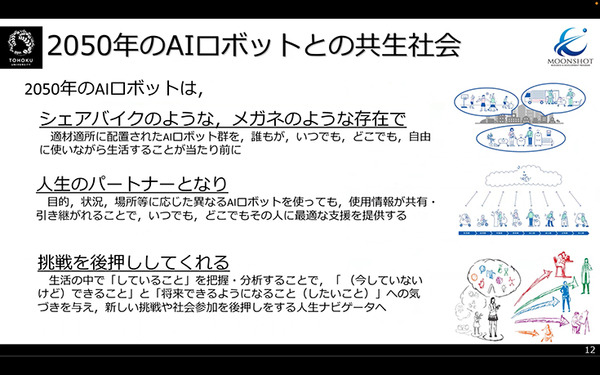
2050年の未来社会とは何か。平田氏は、ロボットは「現在のメガネのように、使っていることが当たり前になる」と語った。また「人生のパートナー」となる。いろいろなロボットを使うが、中身は同じで、情報が共有される。そして「挑戦を後押ししてくれる」ものになるという。生活のなかで「していること」を分析して、「今はしてないができること」を後押ししてくれる。これを「人生ナビゲータ」と名付けている。
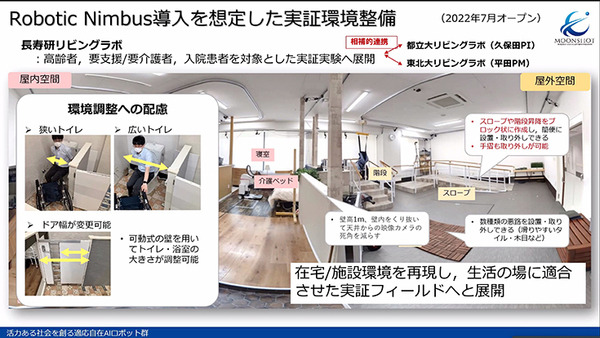
このプロジェクトではAIロボットを使うことが当たり前の社会を「スマーター・インクルーシブ・ソサエティ」と呼んでいる。ひとの個別性に合わせ、身体的、精神的、社会的ウェルビーイングを実現する。そのためのAI・ロボットを開発することを目指している。過剰な支援ではなく、「ちょっと後押しする」ような支援を提供できるシステムの開発、そして社会の実現が目標だ。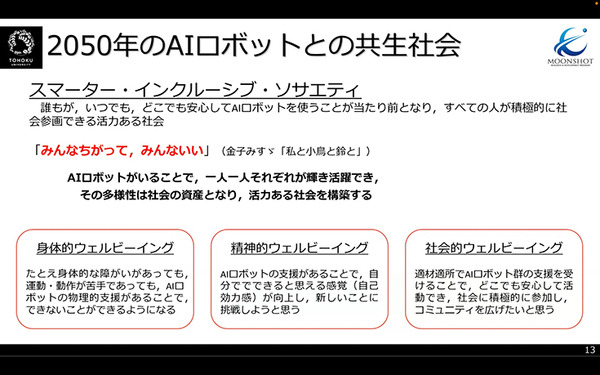
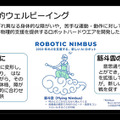
ロボティック・ニンバスが身体、精神、社会的なウェルビーイングを支える
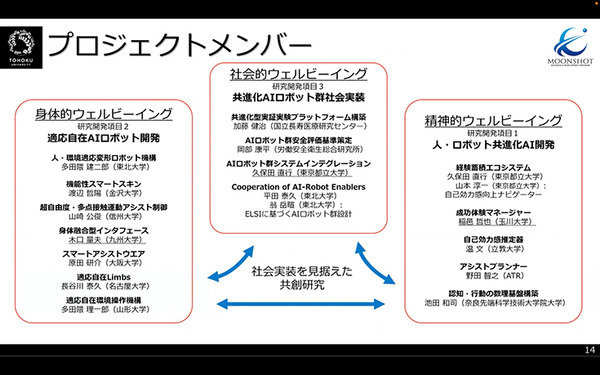
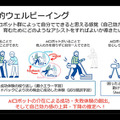
プロジェクトでは身体、精神、社会の3つのウェルビーイング実現を掲げている。
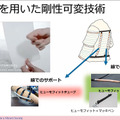
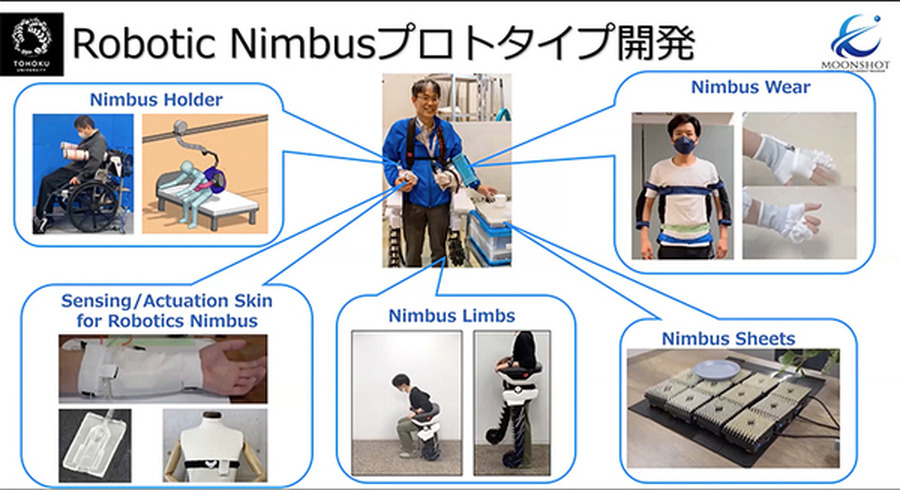
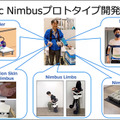
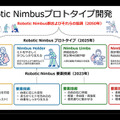
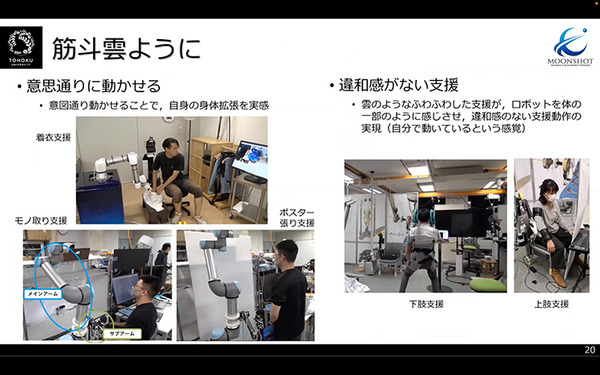
まず「身体的ウェルビーイング」については物理的支援を行うロボットを開発する。雲のように自由自在に変形し、人の体にくっついたり離れたり、また意思どおりに動かせるロボットが作れないかを模索している。これを「ロボティック・ニンバス」と名付けている。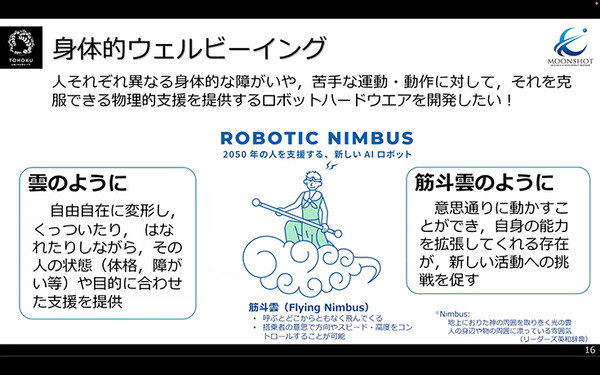
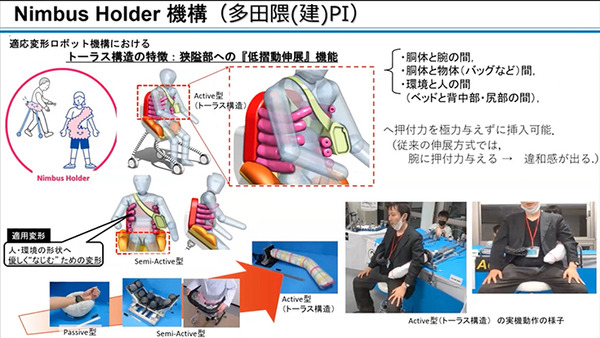
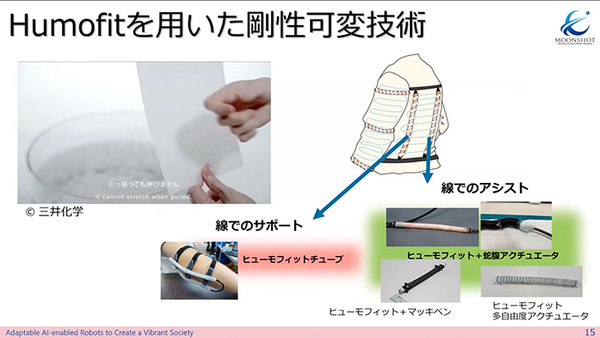
そのために様々な機能を持つ「ニンバス・エレメンツ」を開発し、複数の協調制御で人を支える。要素を組み合わせることで、ウェアや、人をやさしく支えるホルダー、第3の腕となるリム、既存環境をロボット化・スマート化するシートなどを作っていこうとしている。そのための要素技術も開発する。
「人の意思どおりに動かすことができる」というのは、「人をちょっとだけ助けることができる」ようなロボットだ。人の意思や障害を推定し、支援を違和感なく行えるロボットの開発を行っている。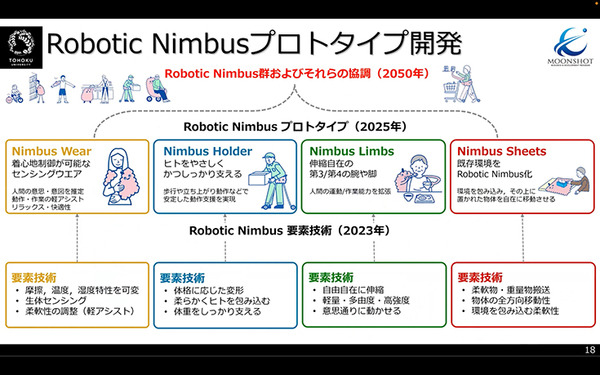
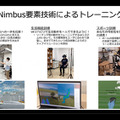
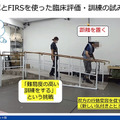
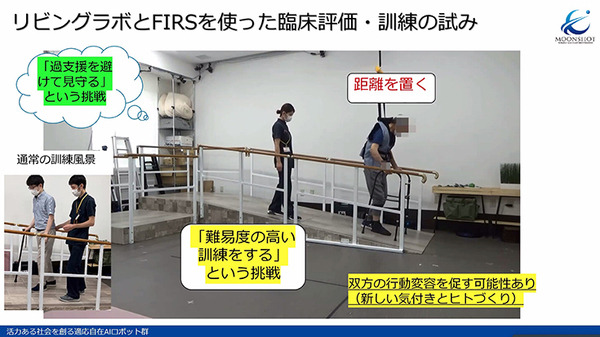
「精神的ウェルビーイング」については、人の「できる」と思える自己効力感を高める。VRとロボットを組み合わせたトレーニングなどを考案している。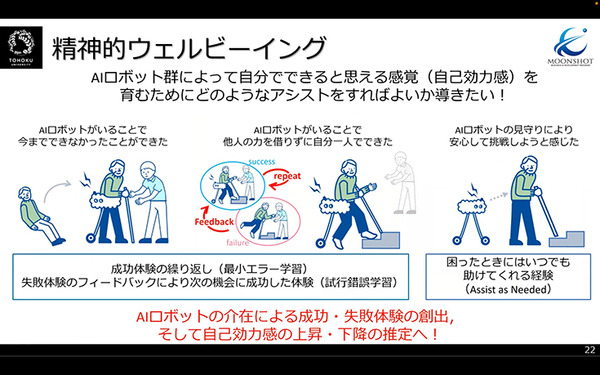
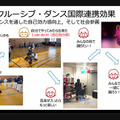
「社会的ウェルビーイング」については、適材適所で活躍できるAIシステムの構築を目指す。将来の可能性を見据えて、うまく提示して「こうなりたい」と思わせるようにする。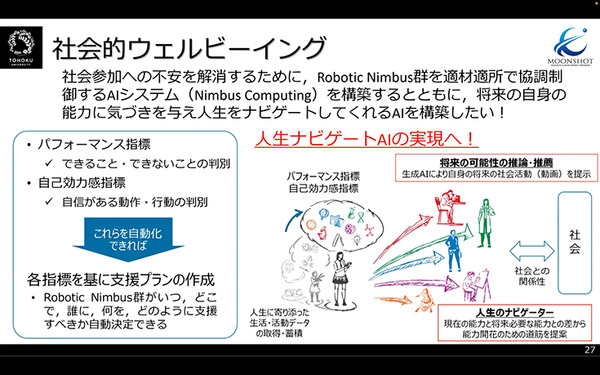
目標は2050年の未来社会だが、人生と寄り添うロボットを作るために、まず今は介護現場を支えることを目指して開発を行っていると平田氏は述べた。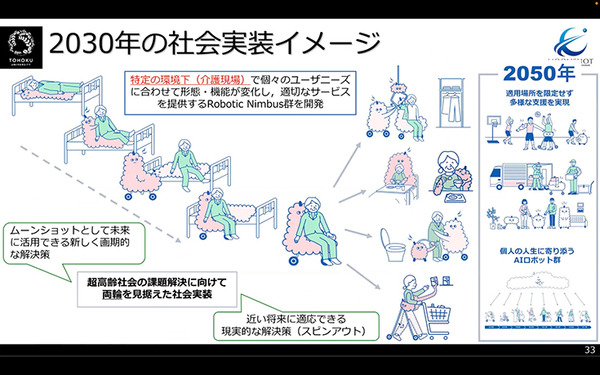
「自分でできる」と自己効力感を高められるロボットを実現するために
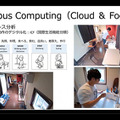
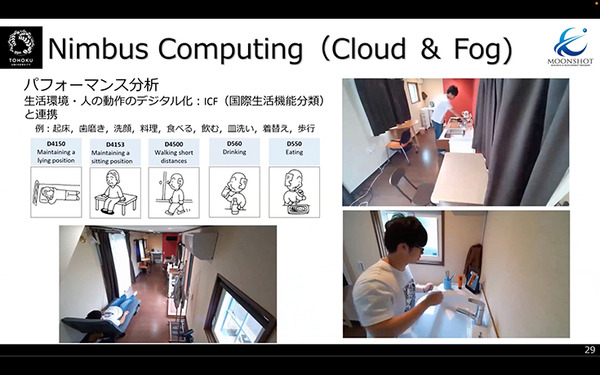
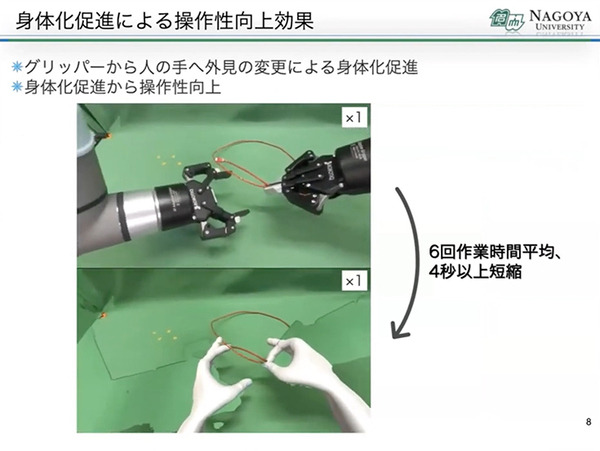
このあとプロジェクト参加メンバーの研究者たちが、それぞれの立場から研究内容を紹介した。形状や形態を変化させつつ、安全かつ適切な支援をユーザーの主体感を支えながら提供するロボットハードウェアの開発状況や、遠隔操作で人が自在に操れるよう没入感を高めるための技術、状況に応じて人に対して必要なアクチュエーションができるデバイス、人の挑戦を後押しする支援方法、安全性評価法、現状機器を生かした転倒衝撃緩和システム、ライフログの活用などが紹介された。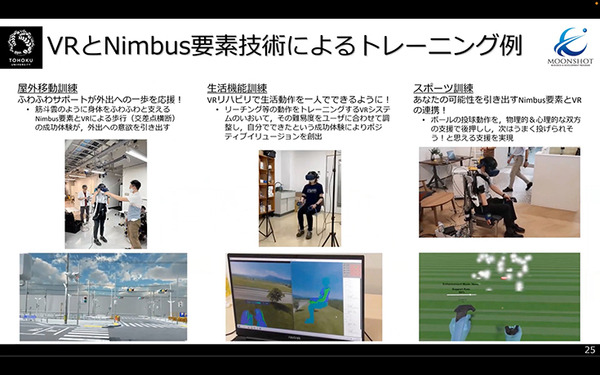


シンポジウムの様子はYoutubeで公開されているので、詳細に興味がある方は直接閲覧してほしい。デモの様子の動画も、公式サイトに後々掲載予定とのことだ。
*動画