米カーネギーメロン大学発の「視触覚」技術の実用化を通じて、ロボットや機械の適用範囲を広げ、様々な社会課題を解決することを目指すFingerVisionは、触覚センサー付きロボットハンドの利用ニーズ拡大に応え、複数メーカーのロボットアームとの通信インタフェースを実装。
これにより、ファナックや安川電機などのロボットに対して、触覚データに基づくフィードバック制御が実行できる環境が整ったとしている。
複数メーカーのロボットに対応する接続方式を採用
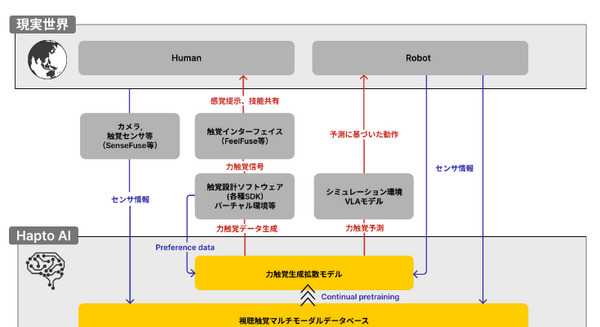
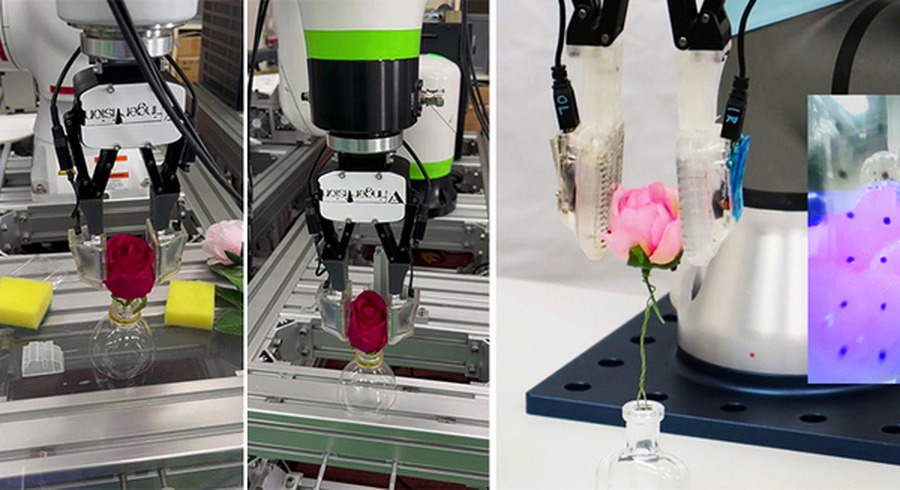
「画像(カメラ)をベースに触覚を再現する」というコンセプトをコア技術とした「視触覚センサー」は、ロボットハンド等の指先に搭載することで、力や滑りの分布等の触覚を知覚できるようになり、あたかも人が「手のひら」の感覚を使って物体を扱うような制御をロボットで実現できる。
触覚センサー付きロボットハンド(α版)に対応する初期的な接続方式として、複数メーカーのロボットへの接続が可能なModbus/TCPを実装した。
接続可能な協働ロボットの例は下記の通り。
・安川電機HC10
・Universal Robots e-series
・Techman Robot TM Robot Series
・NEURA ROBOTICS
2023年7月27日には、日本ロボットシステムインテグレータ協会主催の「新製品・サービス説明会」でも本製品を展示・説明を行い、好評を得たとしており、今後もロボットシステムインテグレータ様をはじめとする皆様にとって、触覚センサー付きロボットハンドを活用したアプリケーションを実装・開発するための環境整備を進めるとしている。
ファナックCRXとの接続動画
【Modbus対応①】#FANUC の #CRXと #FingerVision 接続しました!
いつもの花ですが! pic.twitter.com/yWW5ahfzpr— Yuki Nono (@Yuki_Nono_fv) July 13, 2023
安川電機HC10との接続動画
【Modbus対応②】
#yaskawa の #HC10 と #FingerVision 接続しました!
もちろん、いつもの花ですが! pic.twitter.com/EqUgI0oGwd— Yuki Nono (@Yuki_Nono_fv) July 14, 2023
株式会社FingerVision