
パナソニックホールディングスは、ロボット制御において、環境(ドアやテーブルなど)との接触を含む動作をロボットに教示する際に、教示した動作を正しく完遂する「パフォーマンス」と、接触時の「安全性」を両立する制御パラメータを効率的に学習する技術を新たに開発したと発表した。
今回開発された技術の先進性が国際的に認められ、AI/ロボティクス技術のトップカンファレンスであるIEEE/RSJ International Conference on Intelligent Robots and Systems(IROS)2023に採択され、2023年10月1日から10月5日まで米国デトロイトで開催される本会議において発表される。
https://arxiv.org/abs/2307.15345本研究は、パナソニックホールディングス テクノロジー本部の岡田雅司、奥村亮、マニュファクチャリングイノベーション本部の小松真弓、およびパナソニックHDの客員総括主幹研究員で立命館大学 情報理工学部の谷口忠大教授との連携による研究成果。
ロボットに動作を効率的にプログラムする技術
産業用ロボットの活用が進む中、ロボットに動作を効率的にプログラムする技術がますます重要になっている。特に人やモノとの接触を伴う環境では、タスクを正確にこなしながら、接触リスクを低減する動作が求められるが、その二つを両立するロボット制御は非常に難易度が高いことが知られている。そこでバネのように柔軟な挙動をするロボットを想定し、人がロボットに教示した動作の分節化と、多目的ベイズ最適化で制御パラメータを求める二段階の手法を考案し、従来法に比べて効率的にロボットをプログラムする手法を開発した。
安全性と動作の正確さはトレードオフ、を打破
ロボットの動作をプログラムする手法として人がダイレクトにロボットの動きを教示するダイレクトティーチングという手法が、その簡便さから広く採用されている。
しかしながら、教示した動作をロボットで再生する場合、モノとの接触がある環境や、人や他のロボットとの協働・分業する環境下では不測の接触リスク(人・モノやロボット自身に損傷を与えるリスク)に対応する必要があり、多様なタスクへの展開が難しいという課題がある。
一方、ロボットに柔らかい動作をさせる制御技術として、仮想的なバネ系を模倣することでロボットにバネのような柔軟性を与えるインピーダンス制御がある。
適切なバネ系のパラメータ(インピーダンスゲイン)を設定できれば、教示した動作を正確にこなしながら接触リスクを低減が可能であるが、インピーダンス制御においては一般的に、安全性と動作の正確さはトレードオフの関係にあり、両方を同時に最適化するインピーダンスゲインの設定が難しいことが知られている。
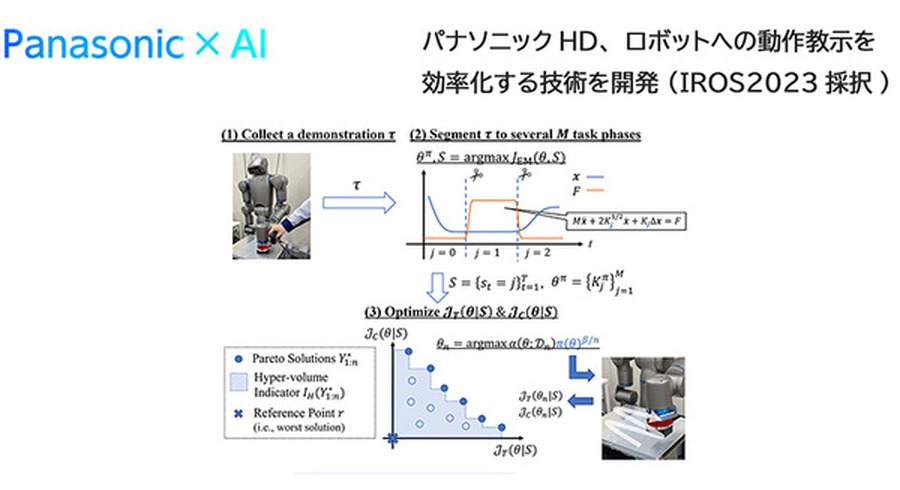
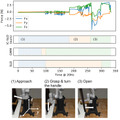
また、タスクの達成のためには連続する複数の動作(例えばドアの場合、(1)ノブに近づくアプローチ、(2)ノブを回す、(3)ドアを開ける)を正確にこなす必要があるが、動作毎に最適なインピーダンスゲインが異なるため、図1に示すように、まずパラメータ最適化が行いやすいよう教示した一連の動作を分節化し、多目的ベイズ最適化により各分節の最適なインピーダンスゲインを求める二段階の手法を考案した。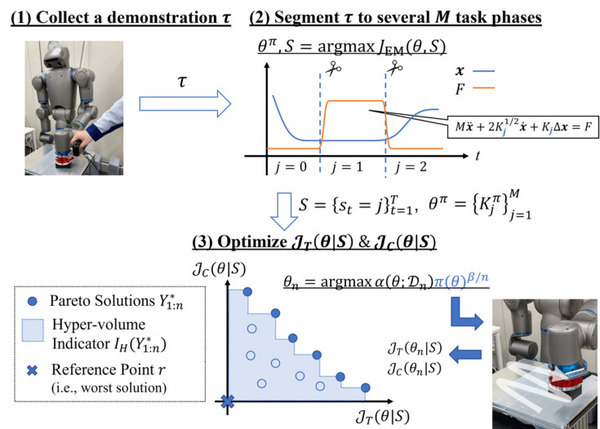
前段として今回開発した分節化手法「IC-SLD(Impedance Control-aware Switching Linear Dynamics)」は、教示した一連の動作がインピーダンス制御が想定するバネ系の運動方程式の複数の組合せによって生成されたと仮定し、方程式内の未知のインピーダンスゲインと方程式の切り替え時刻を推論する問題として定義する。IC-SLDはこの問題を、予測される軌道と実際の教示軌道の誤差を最小化することで求解し、従来法(e.g., GMM((Gaussian Mixture Model)混合ガウスモデルによるクラスタリングに基づく分節化), SLD((Switching Linear Dynamics)教示の動作が単純な線形方程式の組合せで生成されたと仮定した分節化)と比較し、IC-SLDは最適化に適した分節化を実現した。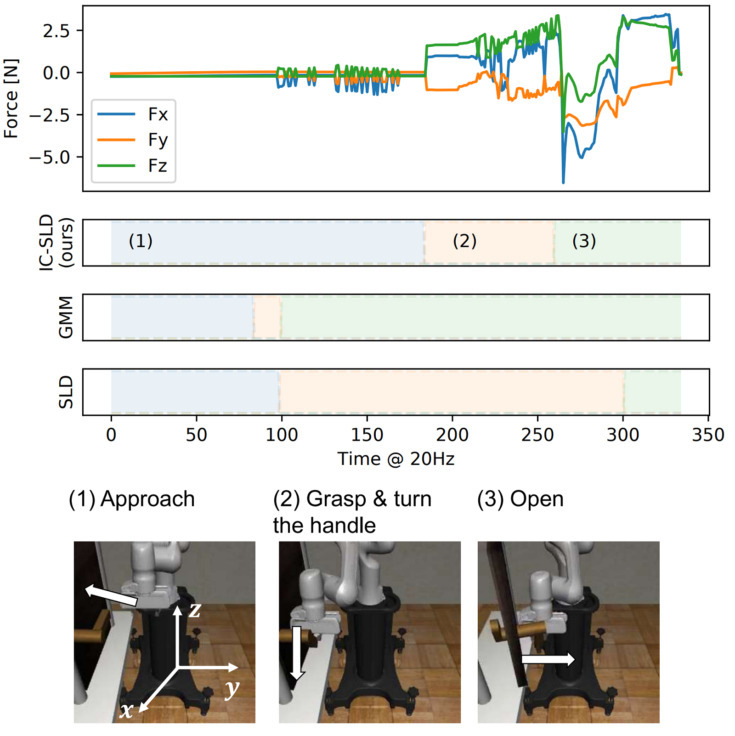
続いて後段では、事前知識を活用したベイズ最適化(未知の関数の形状をデータから学習しつつ、できるだけ少ないデータ数でその関数の最適解の推定を試みる手法)によりインピーダンスゲインを探索する。IC-SLDはインピーダンスゲインの推定値も出力するため、これを解候補として活用することで最適化を効率化する。事前知識を利用可能なベイズ最適化 π-BO [Hvarfner+,ICLR2022] を応用し、タスク性能の指標(報酬関数の累積和)と、安全性の指標(剛性パラメータの累積和)を同時に最適化するインピーダンスゲインをロボットの動作試行を繰り返しながら探索する。
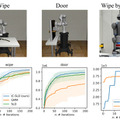
シミュレーションおよび実機評価において、今回開発した手法が従来法よりも短時間でインピーダンスゲインの学習が可能なことが確認できた。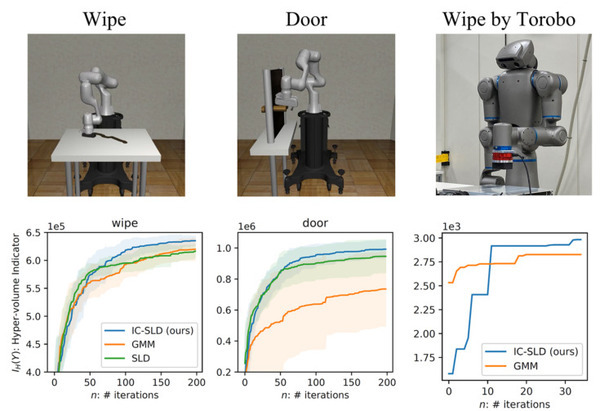
今後の展望
今回開発したロボット教示技術は、これまで難しかった人とロボットが協働する環境でのロボット活用を加速する技術であり、今後もパナソニックホールディングスは、AI・ロボティクスの社会実装を加速し、くらしやしごとの現場の役立ちに貢献するAI技術の研究・開発を推進していくとしている。
