大成建設は、「生産プロセスのDX」の一環として、建設現場特有の作業環境に適応可能な自律走行搬送ロボットシステム「T-DriveX」を開発した。
「T-DriveX」は、資機材の配置や障害物の位置が施工状況に応じて日々変化する建設現場の環境下において、自由度の高い自動搬送を行うことにより資材搬送の省人化を実現する技術で、フォークリフト型ロボットと軽量タイプのパレット型ロボットの2機種で構成されており、今回、この2機種を首都圏内の建設現場に導入して行った実証実験により、その実用性を確認した。
このうちフォークリフト型ロボットは、大成建設、ラピュタロボティクスおよび住友ナコフォークリフトが共同開発したもので、指定エリア内に置かれた資材をカメラによる画像解析で判別し、資材の種別ごとに仕分けて別途指定したエリアに搬送・片付けるという高度な自動搬送を実現する「ランダムピックアップ機能」を搭載している。
開発の背景
建設業界では、社会の高齢化に伴う労働力確保への対応、長時間労働環境の改善が命題とされるなか、ロボット等のICTを活用して労働生産性の向上を図り、働き方改革を推進することが業界全体の急務となっている。
建設工事の各工程の中でも、ロボット等の導入による省人化と作業効率の向上が求められる分野のひとつに建設現場での資材搬入がある。建設現場では搬入車両の荷卸しから各フロアへの資材搬送、フロア内指定箇所への資材ごとの運搬に至るまで多くの人手を必要とすることから、これまでにも資機材の搬送を省人化する様々なシステムの導入が試みられてきた。しかし、現状の普及型自動搬送システムは、搬送物が一定条件に基づいて置かれていることを前提としており、搬送対象となる資材の位置や向き、種別の判別、さらに資材の有無や保管場所の探索まで行えるような高度な機能は備えていなかった。
そこで大成建設は、これらの課題を踏まえ、従来のICタグやマーカーの配置などによる誘導を必要とせず、AIによる画像解析やマッピング技術を用いることで建設現場特有の作業環境でも対応できる自律走行搬送ロボットシステム「T-DriveX」を開発。
このうちフォークリフト型ロボットに搭載されたランダムピックアップ機能は、搬送物を探索しながら識別して自動搬送することができる従来にない高度な機能であり、建設現場だけでなく幅広い分野での活用が期待されている。
「T-DriveX」の各ロボット仕様

| 型式 | TA-SPX10(フォークリフト型ロボット) |
|---|---|
| ランダムピックアップ機能 | ◯ |
| 愛称 | Rapyu.(ラピュー) |
| ベース機製造会社 | 住友ナコフォークリフト株式会社 |
| 本体(ベース)重量 | 1300kg(1200kg) |
| 定格荷重 | 900kg |
| 運用対象 | 高層オフィスビルの基準階での仕上げ材などの資材搬入、片付け、整理整頓 |
| 操作方法 | 汎用搬出入システムとのアプリケーション連携によりタブレット等で容易に実施 |

| 型式 | TA-IC10(パレット型ロボット) |
|---|---|
| ランダムピックアップ機能 | ー |
| 愛称 | KarX(カルックス) |
| ベース機製造会社 | 愛知機械テクノシステム株式会社 |
| 本体(ベース)重量 | 300kg(200kg) |
| 定格荷重 | 1600kg |
| 運用対象 | 高層オフィスビルの基準階での仕上げ材などの資材搬入、片付け、整理整頓 |
| 操作方法 | 汎用搬出入システムとのアプリケーション連携によりタブレット等で容易に実施 |
「T-DriveX」の特徴
1:フロア内での資材の搬入・搬送を自動化(フォークリフト型、パレット型搭載機能)
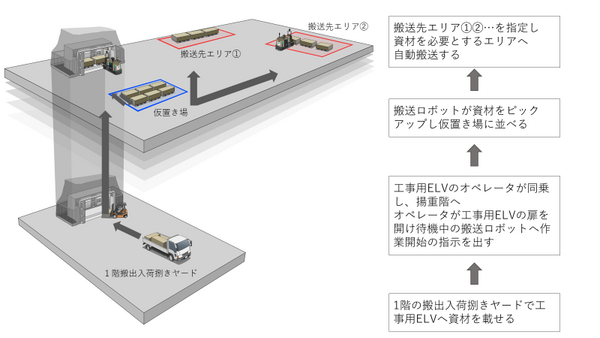
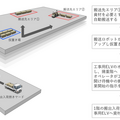
工事用エレベータで対象フロアに資材を上げると、待機していた本ロボットが資材をピックアップしてエレベータ付近の仮置き場への自動搬送を繰り返す。仮置き場からは夜間の時間帯などに複数台のロボットが連携して必要な資材を作業場所近くの搬送先エリアまで自律走行で運搬する。仮置き場への資材搬送は工事用エレベータのオペレータがロボットに作業開始を指示するだけで行え、また、搬送先エリアへの資材ごとの搬送はタブレットから場所を指定するだけで行うことができ、一連の資材搬入作業の省人化、効率化が実現する。
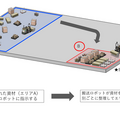
ランダムピックアップ機能により資材を種別ごとに搬送(フォークリフト型搭載機能)
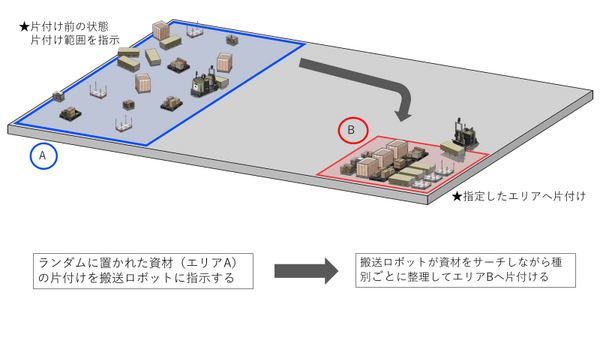
本ロボットは、指定エリア内にある台車や資材をカメラによる画像解析で判別し、種別ごとに仕分けて別途指定したエリアに自動搬送し片付けるというランダムピックアップ機能を搭載している。台車などの向きも認識できるため、台車の並べ直しやパレットの向きを揃える事前準備は不要で、搬入作業を進めながら裏側に隠れている台車も認識して対応可能であり、資材を効率的に搬送することができる。建設現場での片付け・整理整頓や天井仕上げ前の台車と資材の移動など現場状況に応じて極めて自由度の高い活用が可能なことから、様々な局面に応用展開することができる。
今後大成建設は、今回発表したシステム運用でのさらなる安全性の向上に加え、軽量タイプであるパレット型ロボットの機能向上や、長物運搬に特化した自律走行搬送ロボットの開発、ユーザーインターフェースのブラッシュアップ等を行うとともに、今回開発したランダムピックアップ機能を高機能な自動搬送を実現する基盤技術と位置づけ、建設業界だけでなく様々な分野で広く活用できるようシステムの改良を進めていくとしている。