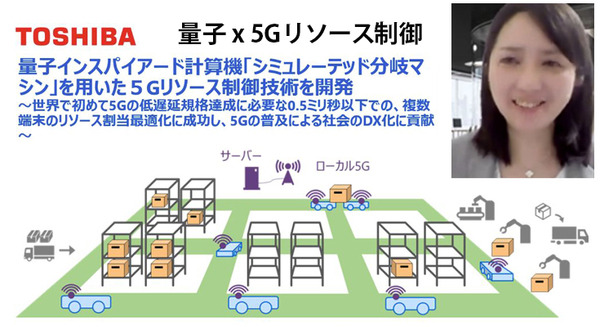

株式会社東芝と株式会社ミライズテクノロジーズは、東芝独自の量子インスパイアード最適化計算機「シミュレーテッド分岐マシン(SBM)」を、ミライズテクノロジーズが開発した自律移動ロボットに搭載し、自律移動体の高度な制御への適用する有効性を共同で実証した。
量子インスパイアード最適化計算機を移動体内部に搭載し、自律移動体の制御に直接適用したのは世界初の取り組みとなる。
開発の背景と課題
人手不足を背景に、物流やスマートモビリティなど様々な現場で自動運転車や自律移動ロボットの需要が拡大し、社会実装が着実に進展している。
これらのシステムでは、カメラやLiDARなどによって周囲の状況を捉える認識機能(検出・追跡)と、状況に応じて最適な行動を選択する判断機能(計画・意思決定)を、短い制御サイクルでリアルタイムに実行することが不可欠となる。
また、自動運転車や自律移動ロボットなどの自律移動体に搭載するためには、サイズ、消費電力、コストの制約を満たす必要がある。
一方で、こうした制約と、近年求められる高度な処理を両立させることは容易ではなく、課題となっていた。
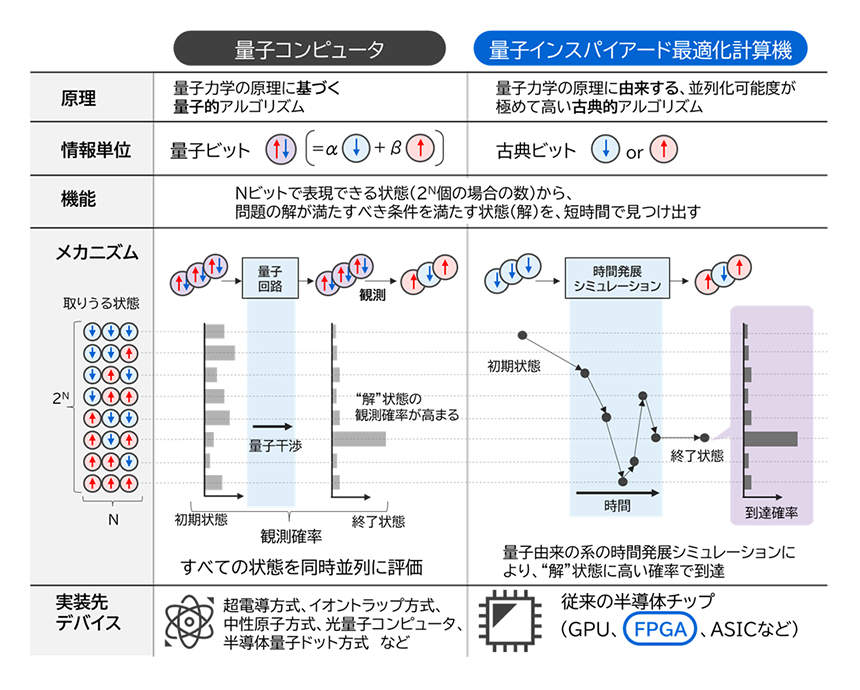
量子インスパイアード最適化計算機は、量子計算の原理に着想を得たアルゴリズムにより、複雑な組合せ最適化問題を高速に解く技術である。
量子コンピュータ用の専用ハードウェアおよび特殊な付帯装置を必要とせず、FPGA・GPU・ASICなど従来のハードウェア上で動作可能であることから、自動運転に求められる高度な意思決定への適用可能性が期待されてきた。
本技術の特長
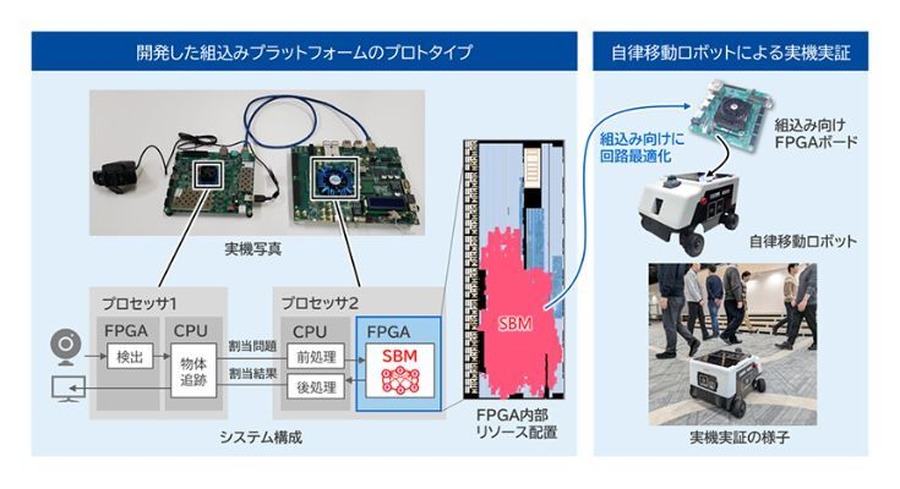
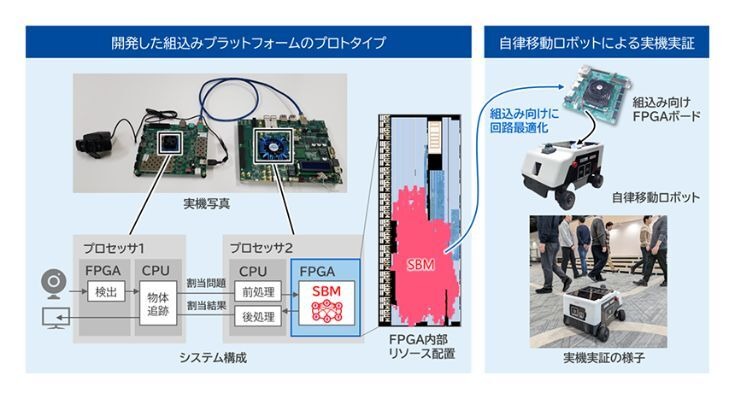
東芝とミライズテクノロジーズは、量子インスパイアード最適化計算機であるSBMを活用し、組込み機器向けの自律移動体制御技術を搭載した組込みプラットフォームのプロトタイプを開発し、その有効性を実機で実証した。本技術の主な特長は以下の通りである。
多体物体追跡アルゴリズムの開発
複数の人や車、障害物が同時に動き、交差や長期遮蔽(オクルージョン)が頻繁に発生する環境でも、個々の物体を見失わずに追跡し続けることができる多体物体追跡アルゴリズムを開発した。
従来手法では、物体同士が重なったり一時的に見えなくなった場合、追跡が途切れたり誤認識が発生しやすいという課題があった。
多体物体追跡では、追跡中の物体と検出物体間の対応付けを、組合せ最適化問題(マッチング問題)を解くことで行う。
通常行われる検出物体と追跡物体の1対1のマッチングだけではなく、本アルゴリズムではSBMの特長である広大で高速な探索能力を活用して潜在的なマッチング(1対多)を見つけることで、オクルージョンの発生箇所を特定することができる。
これにより、オクルージョンが発生しても再追跡が可能になり、物体の移動予測精度を向上させた。
開発した多体物体追跡アルゴリズムは、検出精度・追跡精度の評価指標であるHOTA(Higher Order Tracking Accuracy)を用いた評価において、一般的な多体物体追跡のベンチマーク問題で4%、オクルージョン評価向けに新たに構築したベンチマーク問題で23%の向上を実現した。本アルゴリズムにより、多体物体が行き交うような複雑な環境においても、自動運転車や自律移動ロボットの安全かつスムーズな動作の実現に貢献する。
組込み向けFPGAへのSBM実装
SBMは、計算を同時に多数進められる並列性に優れた量子インスパイアード最適化計算機である。東芝はこの並列性を生かす独自の回路設計技術により、処理能力や消費電力に制約がある組込み向けFPGA上でも、高速動作を実現した。
具体的には、自動運転に必要とされるフレーム速度である10FPSを大きく上回り、多体物体追跡における検出と追跡を繰り返す処理を23FPSで実行できることを実証している。
これにより、従来は高性能なサーバや専用機器が必要だった高度な最適化処理を、車載機器やロボット制御ユニットなど、現場に近い小型・低消費電力な組込み機器上でリアルタイムに実行することを可能にした。
実機による有効性の実証
東芝とミライズテクノロジーズは、ミライズテクノロジーズが開発した自律移動ロボットに、今回開発したアルゴリズムを実装したFPGAを搭載し、複数の動的障害物を回避しながら経路選択を行う実証を、実機で行った。
今回、動的障害物を避ける経路計画を高度化するため、ミライズテクノロジーズは、SBMを用いた物体追跡情報を活用する仕組みを開発した。
本仕組みでは、追跡によって得られる「位置の信頼度」と「移動方向」の情報をもとに、障害物の占有領域を動的に調整し、その未来位置を予測することで、無駄な回避を減らし効率的な移動を実現した。
自律移動ロボットは、カメラやセンサーで周囲の状況を把握し、本システムの多体物体追跡技術を活用することで、静止物体と動的物体が混在する環境においても、リアルタイムに効率的な経路選択ができることを確認した。
東芝・ミライズテクノロジーズ、自律移動ロボットに量子インスパイアード計算機を搭載【世界初】
今後の展望
今後は、東芝とミライズテクノロジーズは、自動運転車やロボットなどの自律制御の分野で、今回実証した組込み向け量子インスパイアード最適化計算機の応用範囲をさらに拡大していく。
具体的には、複数台の自律移動体の協調制御、より複雑な環境下における経路最適化、リアルタイムなタスク割り当てなど、現場で求められる多様な課題への適用を進める。
さらに、これらの技術の特長を生かし、工場や倉庫の搬送ロボット、建設・農業分野の自律作業機、スマートシティやインフラ監視、エネルギー管理システムなど、様々な組込み機器への応用拡大も視野に入れ、現場のニーズに応じた新たな応用分野を開拓し、社会や産業の発展に貢献していく方針だ。