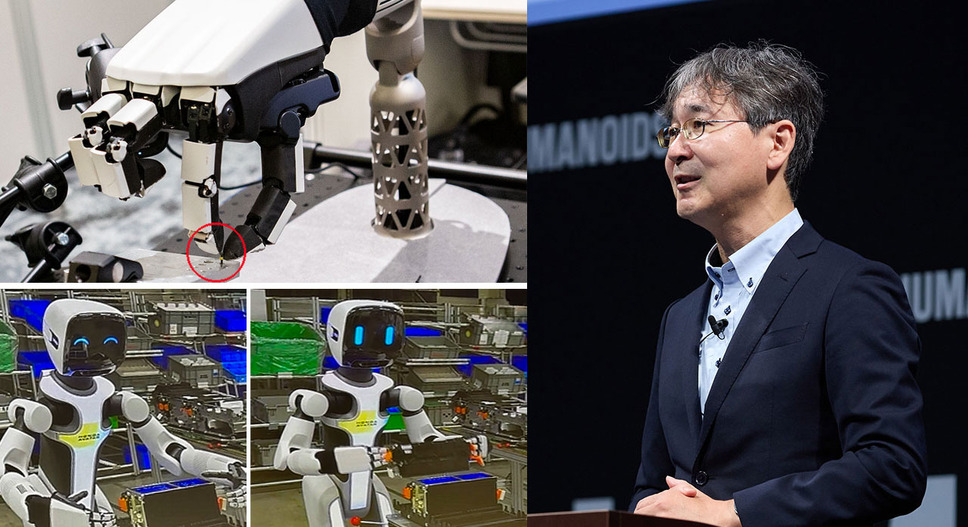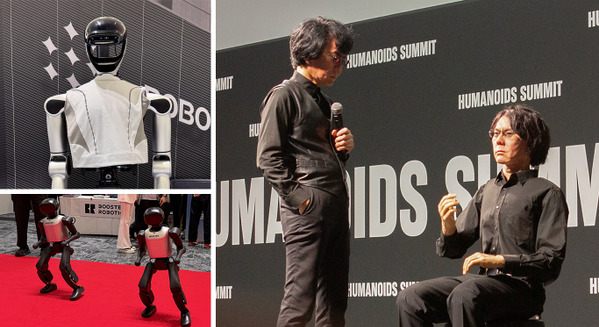





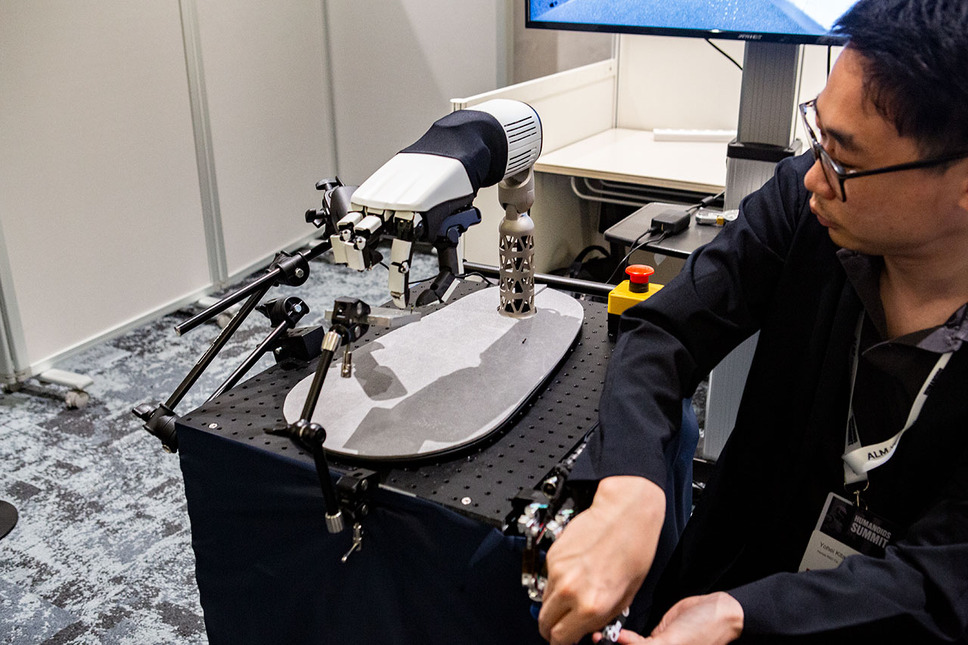
本田技術研究所(ホンダ:HONDA)は、東京高輪で開催された「Humanoids Summit Tokyo 2026」において、同社が開発した新型多指ロボットハンドを一般公開した。(関連記事「ホンダが新型のロボット多指ハンドを一般公開 人の2倍の指先力と微少なネジを回す器用さを実現「Willow Drive」」)

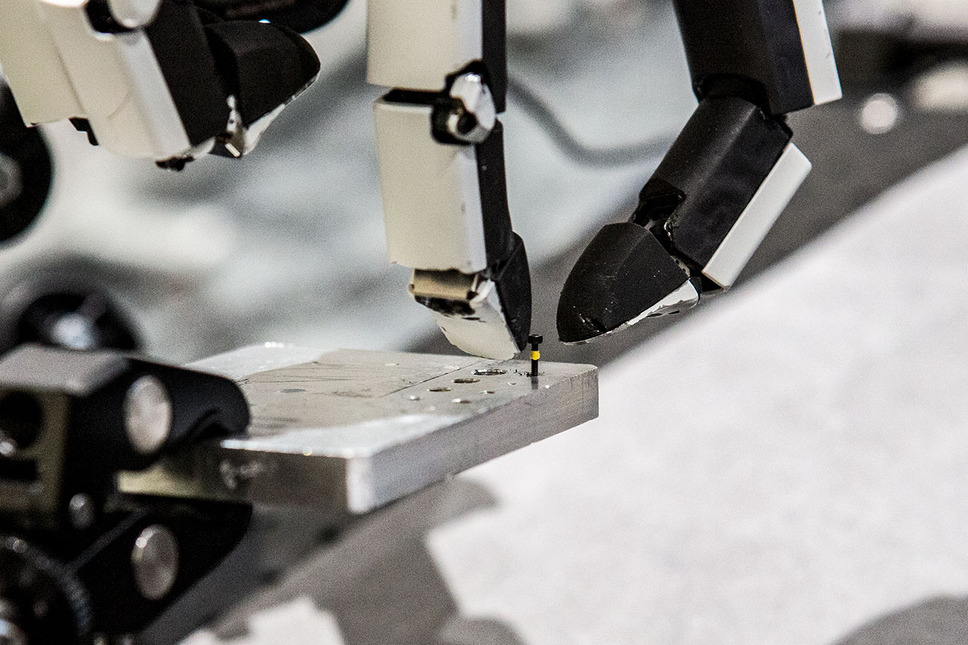
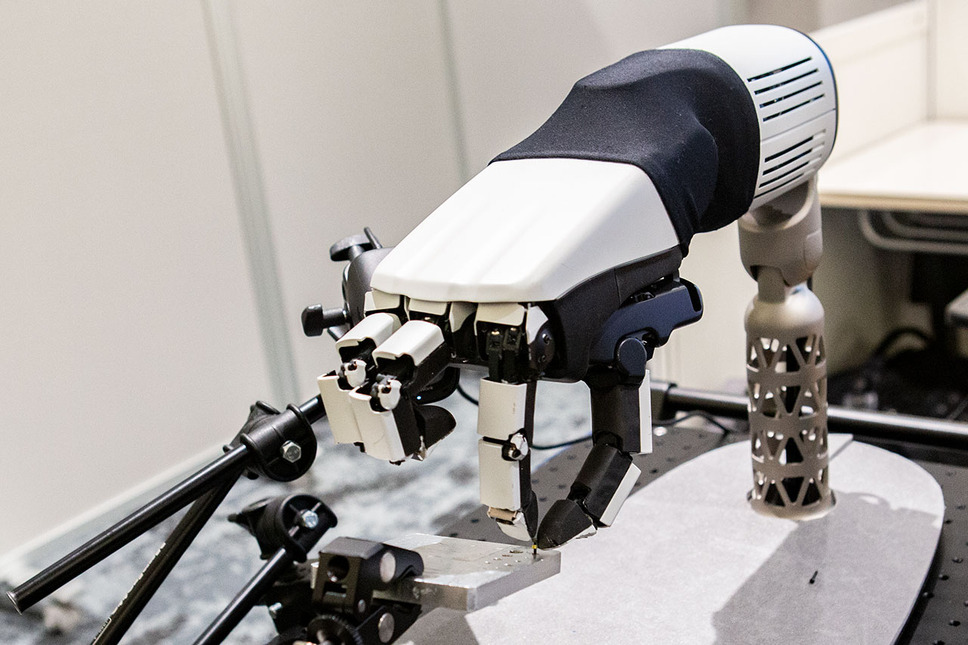
このハンドは、人間の約2倍に相当する最大12kgの指先力を発揮しながら、M1.6サイズの微小ネジを指先で回す器用さを併せ持つ。さらに駆動系だけで約800万回の耐久性を確保し、製造現場への実装を視野に入れた実用レベルに到達しているという。
また今回の発表で興味深かったのは、新型の多指ロボットハンドに加えて、Hondaが描くロボティクスの未来像が垣間見えたことだ。
ロボスタ編集部は、ASIMOの開発にも携わった本田技術研究所 統合研究センターのエグゼクティブチーフエンジニア、吉池孝英氏に話を聞いた。
■ASIMOの技術は今も受け継がれている
「ASIMOのプロジェクトは終了しましたが、ロボティクス研究そのものは止まっていません」。吉池氏はそう語る。
現在、ロボティクス研究を進める統合研究所には、ASIMO開発に携わったメンバーが多数参加している。吉池氏自身も「Hondaに入社してからずっとロボットの脚の研究を続けてきて、ASIMOを歩かせる仕事をしていました」と語り、ASIMO開発から現在の技術研究へと継続して関わってきた。
ASIMOは世界中でデモンストレーションを行い、人型ロボットの可能性を示した。しかし、その活動を続けるだけでは新しい価値創出につながらないという判断から、一度表舞台から姿を消した。

その後もHondaは「社会実装に必要なコア技術は何か」を改めて見つめ直しつつ、ロボティクスの研究を続けてきたという。その成果のひとつが今回公開された多指ハンドだ。
■ヒューマノイド最大の課題は「手」
近年のヒューマノイドブームでは歩行性能が注目されがちだ。しかし吉池氏は、「実際に価値を生むのは移動ではなく作業だ」と指摘する。
「歩行についてはかなり成熟してきています。シミュレーションや機械学習の進歩によって、多くの課題は解決されつつあります。しかし実際の現場で価値を生むのは作業です。その意味では最も重要なのは手です」と語る。
確かに現在のヒューマノイドは歩行や走行はできても、人間のように工具を扱ったり、狭い場所でコネクタを接続したり、柔軟な部品を扱ったりすることはまだ難しい。
Hondaは、そのボトルネックがハンドにあると考えている。
■「器用さ」「力強さ」「耐久性」を同時に実現
現在のロボットハンドには大きく2つの方式が存在する。
モータを指の中に配置する「モータ直結方式」は器用だが力が弱い。一方で「ワイヤ駆動方式」は力が出るが、摩擦や伸びによって精度や耐久性に課題がある。
Hondaは、モータ直結方式とワイヤ駆動方式の長所を両立する独自機構「Willow Drive」を開発し、次世代のソリューションを目指した。
その結果、
・M1.6サイズの微小ネジを回せる器用さ
・人間の約2倍に相当する最大12kgの指先力
・約800万回の耐久性
を新型の多指ロボットハンドで実現したという。
吉池氏は「器用さ、力強さ、耐久性。3つすべてをこのレベルで揃えたロボットハンドは世界に存在しない」と自信を見せる。
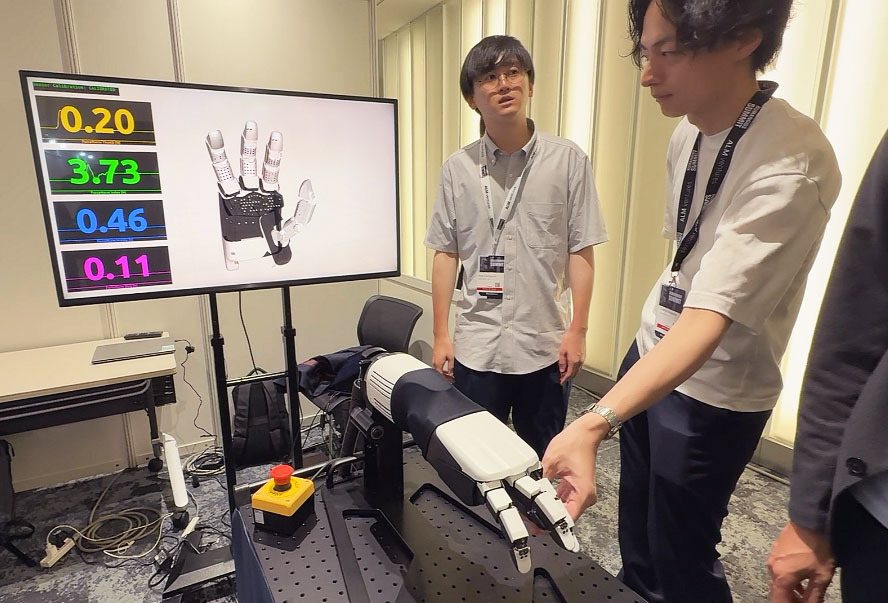
■4指の理由
今回の新型ハンドは4本指を採用している。その理由について吉池氏は「産業用途では4本で十分」と説明する。吉池氏は「一般に物体を安定して保持するには3点支持で十分とされています。さらに人間が作業中に頻繁におこなっている、手の中での持ち替え動作を考慮すると4本指が合理的です」と語る。
「小指は薬指と連動することが多く、独立して器用な作業へ寄与する場面は少ないのです。そのため現時点では省略しているが、小指が必要になればオプションで追加することも可能です」と付け加えた。
■触覚は「人間らしい作業」に不可欠
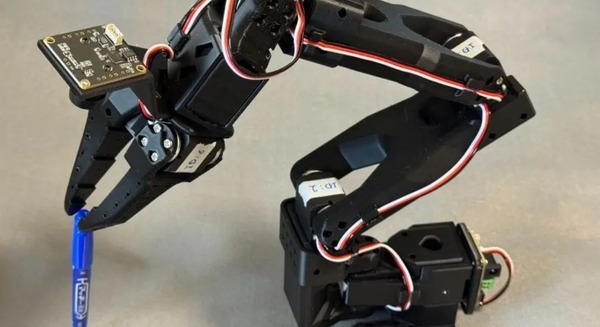
今回のハンドには指先の力覚センサーだけでなく、掌に分布型触覚センサーも搭載した。「人間は物を持った際に少しずれただけでも違和感を覚え、自然に持ち直します。しかし従来のロボットはその感覚を持たず、タスクを確実にこなすには不十分だと考えました。新型のロボットハンドでは触覚情報を活用し、物体が手の中でどのように動いているかを把握しています。
これにより、把持しながら物体の向きを変えたり、部品を正しい方向に調整したりといった、人間が当たり前に行う作業を実現できるようにしています」
■Hondaが考える「ヒューマノイド」
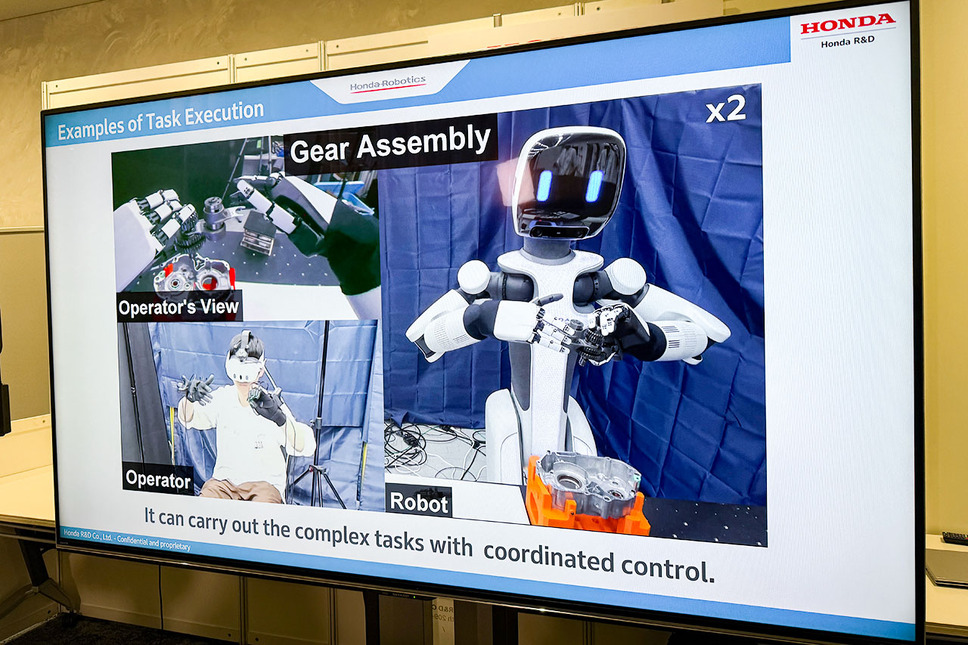
今回の新型ロボットハンドの動画には、その身体となるヒューマノイド風のロボットが登場する。このロボットは車輪型。ASIMOで培った二足歩行型ヒューマノイドについては、Hondaはどのように考えているのだろうか。
その問いに吉池氏はこう語る。
「ヒューマノイドの定義によると考えています。ヒューマノイドが2つの腕を持ち、2足歩行する人と同じ形態にこだわるのか、それとも人と同じ汎用作業能力を指すものなのか。私たちは後者に近い考え方です」
Hondaが目指しているのは、必ずしも二足二腕の人型ロボットそのものではなく、人間と同じような汎用性を持つ作業システムだ。そのため、現時点では二足歩行ロボットの開発を優先しているわけではないようだ。
「一方で、二足二腕が有効なユースケースが見えてくれば、ASIMOで培った技術を活用して、二足歩行を開発することは十分可能です。歩行による移動はかなり成熟した分野であり、社会実装に必要な技術課題は、やはり"手"にあると考えています」
■まずは自社工場へ 人手不足と高負荷作業の解決を目指す
この画期的な新技術を導入したロボットハンドの導入先はどこで、どんなタスクを想定しているのだろうか。Hondaはまず自社工場での実証を想定している。では、自動車工場では具体的にどのような作業を担うことになるのだろうか。
「自動車工場ではたくさんの種類の部品を扱っています。毎日のように数百点、数千点といった様々な大きさと形状の、大量の部品が届きます。その部品は組み立てるセクションごとに仕分けして用意する必要があります。我々が開発してる多指ハンドはこのような部品の仕分けや供給作業を想定しています。
さらには、ワイヤーハーネスの取り回しやコネクタの接続など、高難度な組立作業も対象としています」
特にコネクタ挿入のように、繊細さと強い力の両方を必要とする作業は、長時間繰り返すことで作業者には大変な負担になる場合がある。ロボットの導入は自動化や省力化だけではなく、人間工学上の課題解決にもつながるとの考えもある。
また、日本だけでなく北米でも深刻化する人手不足も背景にある。
Hondaはまず自社工場で実証を重ねながらロボットシステム全体の精度を高めた上で、外販も含めたロボティクス事業として展開していく考えを示している。
■「4次元モビリティ」が目指す世界
吉池氏はロボティクスを「4次元のモビリティ」と位置付けている、と語った。
自動車が2次元、航空機やロケットが3次元の移動手段だとすれば、その次は「時間と空間を超越する移動」だという考え方だ。
ひとつは離れた場所にあるロボットを遠隔操作して作業する世界。もうひとつは、人の分身としてロボットが自律的に作業する世界だ。
今回公開された多指ハンドは、その未来を支える重要な要素技術のひとつと位置付けられている。
ヒューマノイド市場では歩行性能やAIモデルに注目が集まっている。一方で、実際の現場で価値を生むためには、最終的に物をつかみ、運び、組み立てる能力が欠かせない。
その意味で、ロボットハンドの技術革新はヒューマノイドの「最後のピース」とも言える。
ASIMOの時代から培われたHondaのロボティクス研究は、いま「手」という最後の難題に挑みながら、社会実装という新たなステージへ向かおうとしている。