「マウス一個でも、たとえ棒1本でもロボットは動かすことができる」
小さなホビーロボットから、等身大のロボット、トランフォーマー型の変形ロボット、4m級の巨大ロボット「クラタス」まで、どんな大きさのロボットでも制御できる、それを実績で証明してきたソフトウェアが「V-Sido」(ブシドー)です。
開発しているのはソフトバンクグループの「アスラテック」、そしてV-Sidoの開発者がチーフロボットクリエイターの吉崎航氏。経産省関連のプロジェクト「未踏IT人材発掘・育成事業」(以下「未踏」)に採択され、その成果によって経産省から「スーパークリエータ」に認定された人物です。
V-Sido開発の理由やコンセプト、ロボットの制御にかける思いなど、吉崎氏に聞きました。
V-Sidoとは
「V-Sido」(V-Sido OS)は前述のとおり、様々なロボットで使われている制御ソフトウェアです。制御ソフトの役割はいわばロボットの動作すべてを担うこと。
ロボットは立っているだけの直立姿勢でいるときから、手足を動かしたり、踊ったりする際もバランスを保つ必要があります。人間でも片方の脚を上げて立つときには、膝や腰を曲げたり、手を拡げて身体のバランスを意識しますが、ロボットもそれを制御するしくみが必要です。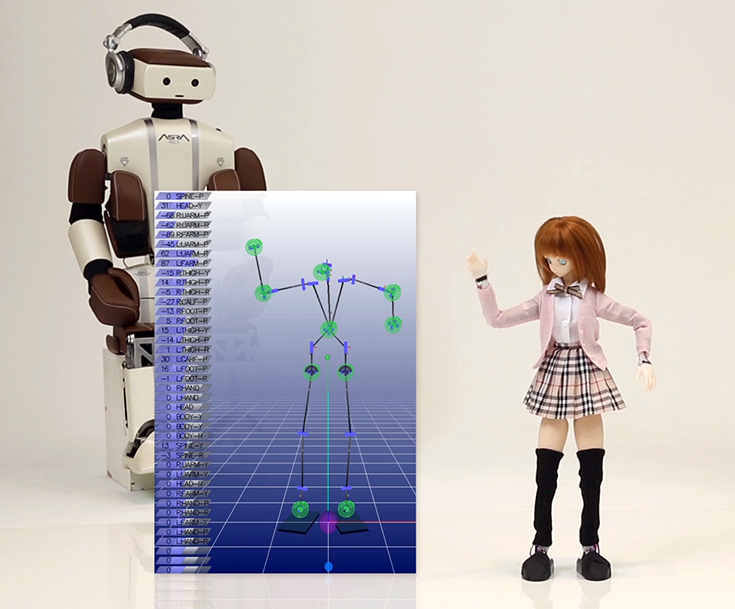
また、外部からのチカラで押されたり、何かとぶつかるなど、急激な姿勢変化にも即座にバランスをとって転倒しないように姿勢を制御する必要があります。転倒を予測した場合は、壊れないように関節のモーターをオフにして衝撃に供えるなども重要です。
人間は無意識にバランスをとり、転倒時には受け身をとって怪我を最小限に抑えるようにしていますが、ロボットの場合はそれを制御するソフトウェアが必要になります。これらはほんの一部に過ぎませんが、ロボット制御ソフトウェアはこのようにロボットの動作や操作に関わる基本的な機能の多くを担っています。
ドール型から巨大ロボットまで
V-Sidoは実際に採用された実績も多岐に渡っています。その大きな特長のひとつがロボットのサイズに関わらず、搭載できることです。
例えば、身長30cmのホビーロボット「GR-001」、バランスを取るのが難しい細身のドール型(佐川電子「SE-01」)、建機操縦用に作られた等身大の人型ロボット「DOKA ROBO2」、人間そっくりのアクトロイド(ココロ製)、そして水道橋重工の「クラタス」やトランスフォーマー型の変形ロボット「ジェイダイト」などに搭載されています。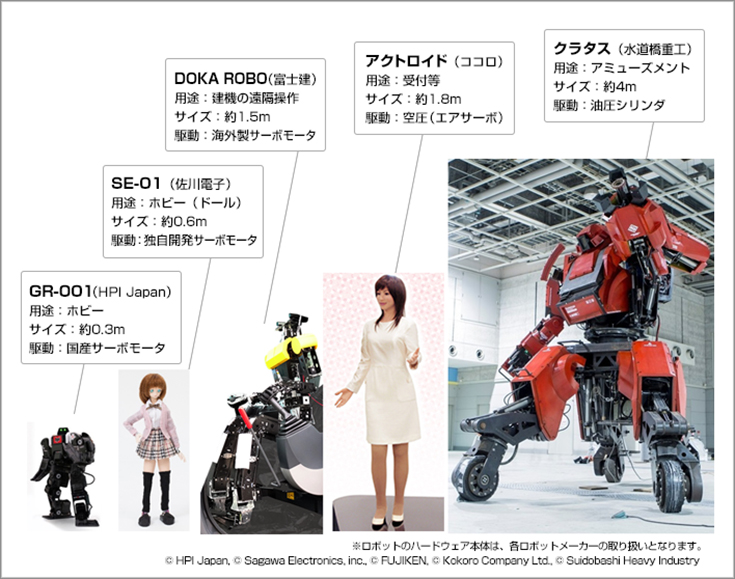
電動、空圧、油圧サーボにも対応
ロボットの関節や駆動部分には一般に「アクチュエーター」と呼ばれる様々な形式のモーターが使用されています。ホビー用のロボットや小型のロボットには一般にバッテリーで駆動する電動モーターが使われています。「Pepper」には電動のブラシモーターとブラシレスモーターが用いられています。
また、大きなロボットになると、人間そっくりなアクトロイドではエアサーボ・モーター(空圧)が、クラタスでは油圧サーボモーターが使われています。V-Sidoはこれらどのサーボにも利用できる汎用性を持っています。
たとえ棒1本でもロボットは動かすことができる
吉崎さんには90分にわたるロング・インタビューにお付き合いいただき、とても興味深いお話しをたくさん聞かせていただきました。そのごく一部ではありますが紹介します。
神崎(編集部)
汎用性の高いコンセプトでロボットを制御する「V-Sido」を開発しようと思った理由を教えてください。
吉崎(敬称略)
アニメの影響などがあって、小さい頃からロボットが好きでした。世代的にはガンダムやガンプラに影響を受けました。
ただ、少し他の子供たちとは違っていた点があって「自分が巨大ロボットを操縦したい」という思いはなく、「なぜ操縦桿2本でロボットが動かせるんだろう?」なんて考えていました(笑)。
また、普通は大人になるにつれて「操縦桿たった2本で巨大ロボットが操縦できるのは”アニメの世界”だからだ、実際にはそんなことできるわけない」と考えると思いますが、私はそうではなく「操縦桿2本でロボットを動かすにはどうしたらいいだろう」という思いがずっとあったんですね。そしてそれを実現しようという思いが「V-Sido」には詰まっているんです。今ならはっきりと「マウス一個でも、たとえ棒1本でもロボットは動かすことができる」と言えます。
神崎
すごい技術ですね。開発のきっかけは経産省の「未踏」プロジェクトですか?
吉崎
具体的に開発するきっかけとなったのは未踏に採択されたことです。それまでもロボットは作っていましたが、どんなロボットでも簡単に姿勢を制御するプログラムを開発して、それを「V-Sido」と名付けました。
神崎
ロボットでも「制御ソフト」の開発を選んだのはどんな理由からですか
吉崎
中学生の頃の自由研究のタイトルが「巨大ロボットはどこまで実現できるか?」というものでした。そのときに30~40cmくらいのロボットを自作しました。そのままそのロボットで何かの競技会や格闘大会などに出場していればよかったのに、その代わりに私は「このロボットをこのまま10倍にしたら何が起こるんだろう?」と計算を始めてしまったんですね(笑)。
神崎
中学生のとき、既に巨大ロボットの実現性を(笑)?
吉崎
いま考えれば稚拙な計算ですが、でもその結果、18mのガンダムはまだ難しいけれど、最近の技術を使えば8mのパトレイバーなら計算上は歩けるに違いないと思い込んでしまったわけです。そうなると、技術的に足りないのは何だろうと考えた末、「制御するソフトウェアが足りない」という結論になりました。中学のとき、そんな自由研究を書いてしまったのでソフトウェアの道を選んだんです。当時一番ロボコンで強かった高専の面接で「ロボット制御のためのソフトを書きます」といって入学し、それからずっと制御ソフトウェアをやっています。
神崎
駆動系には興味がなかった?
吉崎
すごく興味がありました。「ロボコン」(ロボットコンテスト:ロボット競技)を見ていてもそうですが、ロボットは決して一人では作れるものではありませんし、例えば巨大ロボットを作るときに「ありがたがられる分野の技術ってなんだろう」と考えていたら、たまたまやっぱり制御ソフトウェアであり、行きついたのはV-Sidoでした。
本当は人工知能も作りたかったんですが、その当時がちょうど人工知能が冬の時代だったので、周りから「人工知能は絶対やっちゃダメだ」みたいなことを言われて(笑)、「そんなことないんじゃないかな」と思いつつも、周囲の環境が許してくれませんでした(笑)。
しかし、いつ人工知能ができてもいいように、人工知能とロボットの間の部分を目指して、今のV-Sidoの切り分けができたとも言えます。
神崎
いま中学生頃の計算を振り返ってみてどうですか?
吉崎
今でも8mはイケると思っていますが、現実的に試すことができたのはクラタスの約4mですね。まだ半分なので、更に巨大なロボットをどうやって実現できるかは常に考えています。
乗用車とラジコンを同じソフトウェアで制御するような技術
神崎
V-Sidoの公式ホームページには、ドールサイズからクラタスまであらゆるサイズのロボットに対応すると書いてあります。とても興味深い一文なんですが、手の長さも太さも違う、身体の重さも全然違うものが同じ制御でイケるとは私にはとても思えないのですが・・
吉崎
同じ制御でイケる・・・・とは、わたしにもとても思えないですね(笑)。
思えないんですが、それでも世の中のクルマにはラジコンがあって、ミニ四駆があって、実際の乗用車やトラックがありますよね。用途や操縦方法は違っていても、基本的な構造は同じ部分が多くありますし、それぞれのサイズで制御するソフトウェアの需要があります。ロボットも同様で、サイズにかかわらず互換性を持った制御技術の需要は大きいと思っています。
神崎
なるほど、ラジコンと乗用車は構造は似ていますが、操縦方法は異なりますし、きっと今までの考えでは乗用車の制御系コンピュータにラジコンのものを搭載するなんて常識外、と考えるのが自然だったでしょうね
吉崎
しかし、具体的な開発を例にとると、仮に4m級のロボットを作りたいと思っている人や企業があるとして、最初からそのサイズのロボットを作って制御することは難しいので、やはり1/2のサイズやもっと小さなサイズで構造が近いロボットを作って試してみますよね。小さいものを作ってみて成功したら、それをステップアップやサイズアップしていく。そのときに制御ソフトウェアをまた一から開発し直すのでは効率が良くありません。だからV-Sidoは、大きなロボットにも小さいロボットと基本的には同じ制御を活用できて、大きくなった分、必要な機能を手軽に拡張できることを目指して開発を進めてきました。
サーボについても同様で、ホビー用サーボでも油圧でも、空圧であっても対応できる制御ソフトを目指していますし、「そんなこと無理だろう」と言われれば、なおのこと実現させたいと気持ちになりますね(笑)。
V-Sidoなら操縦桿でも無線でも操作可能
神崎
僕がV-Sidoを更に凄いと感じたのは、巨大ロボットの操縦席に人が搭乗したときは操縦桿で操作しますが、遠隔からスマートフォンを使って操作することもできることです。これは先ほどの例で言えば、人が操縦する乗用車をスマートフォンでも操作できるのと同じことですよね。
子供の頃のアニメでは、敵に捕らわれたヒーローロボットに主人公が乗り込むことができないと「よーし、それならば無線操縦で操作だ!!」とか言って操作しはじめるシーンでは、子供ごころに「すごいぞ!!」なんて飛び上がって熱狂したものです。でも、そんなことって非現実的だと思っていました。操縦と無線操作って全然違う技術や機構であって、そんなこと実現できないんじゃないかと想像してたんですね。
吉崎
それは自分自身での興味でもあり、その答えを急いで出してはいけないと思っています。ただ、はっきり言えることは、さきほどお話しした「操縦桿のレバー2本でロボットが本当に動かせるのか」という疑問に対して「どんなものでも動かせるよ」って言うことを証明するのがV-Sidoなんです。
だから「ジョイスティックで巨大ロボットを動かせるようにして」って言われればできるように準備していますし、「キネクト(Kinect)で人間の動きをトレースして動かしたい」「スマートフォンで動かしたい」と言われれば、それぞれできるように作っています。
神崎
現実的にそんなことができるものなんですね
吉崎
先ほどの巨大ロボットの例で言えば、考え方の基本は遠隔操縦なんです。ロボットに搭乗したときはゼロ距離遠隔操縦だと言う考えに立っています。搭乗と遠隔の両方に対応したければ、遠隔を基本に考える方が順序としては正しいのではないかと思っています。遠隔ができるならば近距離やゼロ距離もできるということですね。
また、運転席に乗って操縦する方法とスマートフォンによる操作だけでなく、小さい人形を手元で動かすと大きなロボットが連動して同じ動作をする「マスタースレーブ」という操縦方法もV-Sidoでは可能です。これを発展させて、人形と巨大ロボットのどちらも自由にマスターにできる「バイラテラル」も実現させることができました。
例えば、大きなロボット側が油圧サーボであっても、それを動かすための電気的な回路を自分で引いて設計し、油圧なのに柔らかい関節を実現しています。それによって大きなロボットの関節が外部からのチカラで動かせるようになり、それに連れて小さな人形側を連動して動かすことに成功しました。特殊なセンサーを使わずに角度のセンサーと制御だけで実現しているところが特長です。
工事の重機や建機で現状ではニーズがない技術なのかもしれませんが、油圧サーボを柔らかく動かす技術がある、ということは重要だと思っています。
神崎
それは将来的なロボティクス分野にとって素晴らしいことですね。驚きました。吉崎さんは、プロジェクトとして「ジェイダイト」(神器建造ジェイダイト)の開発にも関わっています。いわゆるトランスフォーマー形態ですよね。等身大くらいのサイズを初めて見たときにもビックリしましたが、ジェイダイトの公式ホームページでは巨大ロボットの開発も告知されています。
吉崎
人が乗れるクルマ(ビークルモード)から、ロボットモードに変形して歩ける約3.5m級のものが告知されています。最終目標は5m級です。
動画 J-deite Quarter Progress report 2014/10 (Project J-deite)
神崎
ロボットの制御部分に加えて、自動車の走行部分もV-Sidoが制御しているのでしょうか?
吉崎
はい。例えば旋回は、コントローラのハンドルを回すことで舵角が変わるように制御はしていますが、メカ的にはハンドルはステアリング機構と繋がった構造ではなく、こうなるだろうとシュミレートしつつ舵角を変え、左右前後のタイアの回転数もそれに合わせて調整しています。そのため乗用車で用いられているデファレンシャルギア機構はありませんが、それと同様の動作が行えます。
神崎
ジェイダイトは変形が可能で、カッコ良いデザインですが、ここまでデザイン優先でも制御ソフトウェア開発側としては大丈夫なものなんですか(笑)?
吉崎
はい、私は常にデザイン優先で良いと思っているんです。「カッコいいデザインのロボットを作りたい」と考えているクリエイターや開発者の方々はたくさんいて、その思いや情熱をスポイルしてまで、制御ソフトウェア側から押し通したり要望するような重大なことなんてないんじゃないのか、と感じています。ありったけの制御技術を使って、まずは”気持ち”のある人、”ハート”ありきで一緒にどこまで実現のお手伝いができるかを考えています。