


「SoftBank Robot World 2017」が昨日開幕した。本日までの2日間、東京・港区のベルサール汐留にて開催されている。過去にはPepper Worldが数回に渡って行われてきたが、今回からソフトバンクロボットワールドと名称を変え、Pepper以外のロボットを扱っているのが特徴だ。
今回は数々の講演がある中でも、もっとも注目度が高いであろう、ボストン・ダイナミクスのCEO マーク・レイバート氏による講演の模様をレポートしていく。
シンプルを組み合わせて、複雑な動きを実現する
ボストン・ダイナミクスのロボットは、私たちをいつも驚かせてくれる。以下の動画は過去にYouTubeで公開されたものだが、どれも高度な動きで私たちの度肝を抜く。
マーク・レイバート氏は、「通常、ロボットのこのような動きを実現する時には、物理学で軌跡を計算して、その方程式の結果を振る舞いに採用する、という方法をとります。しかし私たちは違うアプローチを取っています」と語った。
マーク・レイバート氏
多くの人たちは、コンピュータが指令を出せば、ハードウェアが思うまま動くと思っているかもしれません。人間も脳が指令を出すと指示通りに動くと考えている人も多いと思います。しかしそれは間違った考え方で、実際の世界ではあらゆるものがロボットに影響を与えているのです。
例えば、何かに触れば空気の流動の問題も起きます。重力もあります。内部と外部の両方から影響を受けているのです。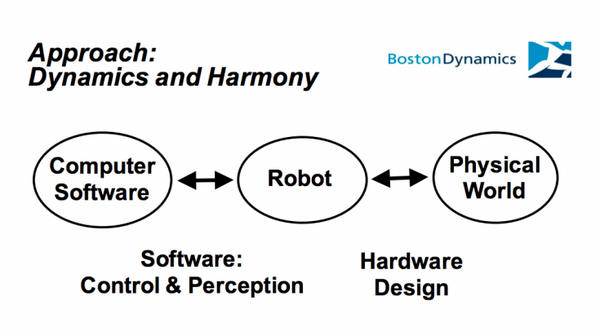
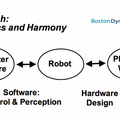
その外部からの影響は、コンピュータが指示をすることと同じくらい影響を与えます。そのため、物理学とコンピュータの両面からのアプローチが大切です。私たちは、物理の法則と、コンピュータの指示が協調していることを目指しています。
また私が目指していることは、シンプルなモデルを組み合わせて高度な振る舞いを実現するということです。
歩行モデルは70年代に研究者が確立したモデルでした。転がる卵から(高さエネルギーを前進するエネルギーに変えることで、効率的にエネルギーを使う)歩行モデルが発見されました。人が走る動きはボールが跳ねる動きと似ていると言われています。このように一つ一つの動きをシンプルに分解し、実現していき、これらを組み合わせることによって複雑な動きをできるようにするのが、ボストン・ダイナミクスのアプローチです。
このようなシンプルなモデルを頭に入れることで、複雑な動きを組み合わせて実現することができます。さらに、学習という機能を加えることで複雑な動きもできるようになるのです。
ボストン・ダイナミクスが大切にする3つのこと
マーク・レイバート氏
ボストン・ダイナミクスがロボットを作る上で大切にしているのは、”Build it(作る)” “Break it(壊す)” “Fix it(直す)”の3つです。まずできるだけ早くロボットを作る。そして、実際にロボットを作って、実世界の経験を積ませるわけです。ロボットを開発する人たちは愛情を持って開発をするため、ロボットを壊さないように、危険な実験はしない人が多いかもしれません。しかし、まずはいろんな経験を積ませてみることが大切です。もちろんうまくいかないこともたくさんあります。そのうまくいかないものはデータを取得していきながら、デザインを変えていきます。これが直すということです。私たちは、このサイクルを短期間で積極的に回しています。
そう言って、同氏は、過去のボストン・ダイナミクスの失敗の動画を披露した。以下の動画がその一部である。
「私たちの大切にしている「Build it(作る)」「Break it(壊す)」「Fix it(直す)」。皆様のロボット開発にもぜひ採用してください」とロボット開発者へのメッセージを贈った。
「SpotMini(スポットミニ)」の構造
マーク・レイバート氏
では、実際に私たちが取り組んでいるロボットの話をしていきましょう。まず、こちらのスポットミニはボストン・ダイナミクスの最新のロボットです。実用化に向けて、試験するパートナーもすでにたくさんいます。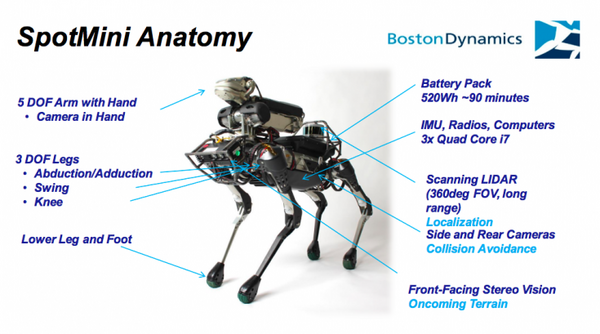
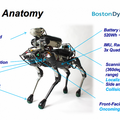
このロボットは4本の脚が付いており、それぞれに自由度が3あります。そして、ロボットアームが頭のところに付いています。ロボットアームには5つの自由度があります。ロボットを開発されている方々からすると、ロボットアームには自由度が7くらい必要だと思うかもしれません。しかしベース自体が動くのであれば、アームはシンプルで良いわけです。アームのテクノロジーは手がどこまで届くかを考えて、自由度を多めに持たせていますが、このように(マーク氏が体をマイクの方に近づける)自分自身が動くことで、手を伸ばさなくたってマイクに触ることができます。
SpotMiniはバッテリーを搭載し、電動アクチュエータを採用しています。サイズは前のスポットよりも小さくなり、「SpotMini」は28キロしかありません。このロボットは、アメリカの家庭で使うことを想定して開発されており、階段があったり、テーブルがあったりするような、家庭内でも動き回れるようにしなければいけません。
こちらの映像は、スポットミニが自律ナビゲーションをおこなっているところです。ライダーとステレオシステムを使いながら、マップを理解し、ここに行きたいというところを指示するとその通りにロボットが動いていきます。同時に、障害があった場合には避けるようになっています。1度通った道を、2度目に通る時に障害があった場合には、それを避けて通ることができるのです。
ロボットアームの先端にはカメラが付いていますので、ものを取り上げることもできます。施設内をパトロールすることもできます。
これはSpotMiniの歩行時の様子です。緑は歩けるところを、赤は足を置くとまずいところを示しています。青はその赤いエリアの端っこです。置くべきではないけれども置いても良いところが青で示されています。自分の足は何本か、そしてこの地形とサイズを比べて、そこを通れるかを計算し判断しているのです。
スポットミニはこれからプラットフォームを作っていきます。これは携帯電話と同じコンセプトです。いろんなアプリケーションがこのプラットフォームの上で作られます。LiDARをつけたもの、アームをつけたもの。スポットミニにはアームをつける予定ですが、それは自分たちで好きなようにつけ変えることができます。
建設現場で計測を行ったりするような「アプリケーション」を世界中の人たちがこのプラットフォーム上で作ろうとしているのです。
ロボットは生物から学ぶ?
マーク・レイバート氏
ボストン・ダイナミクスでは、バイオミミック(生物を真似すること)をしているのではないかと推測されることもありますが、私たちはそのようなことはしていません。自然は、観察してインスピレーションを得るために使っています。そこからエンジニアツールを使って、人間がエンジニアリングをする。ロボットのエネルギーというのは、人や動物とは全然違います。しかし似たようなところもあります。そこを観察し、ロボットに活かしていくのです。
例えば私は、手を机の上に置き、そこに体重を乗せたまま移動することができます。しかし、それを私自身はどのようにおこなっているのかを理解していません。こういった事柄をきちんと分解して、学びながら開発に落とし込んでいます。私たちはバイオミミックをするのではなく、あくまで自然を「インスピレーションを得られる場」として見ているのです。
ヒューマノイドロボット
マーク・レイバート氏
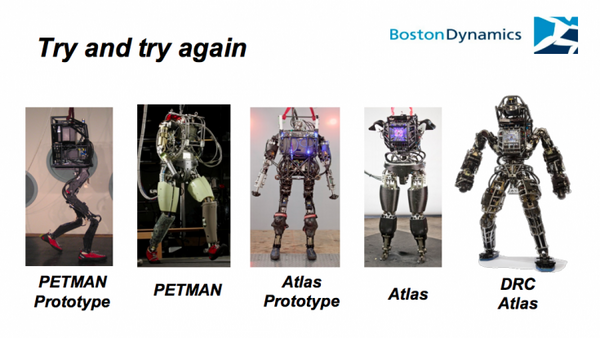
私たちは、数々のヒューマノイドロボットを作ってきました。はじめにペットマンというロボットを開発しました。
日本では、毒ガスが地下鉄で撒かれた凄惨な事件がありました。このような、毒ガスが撒かれた環境下での試験は人間にはできません。そこでヒューマノイドがスーツを着て、着ているものが本当に防護になるのかを試験したりするのです。
そのあとも、いくつかのタイプのヒューマノイドロボットを作ってきました。
アトラスは、開発されて以降、どんどん小さくなり私よりも軽くなりました。そして今では私よりも強いと思います。でもまだ私よりは賢くはないかなと思います。笑 そのうち私以上に賢くなることでしょう。
ロボットの活用方法とは?
マーク・レイバート氏
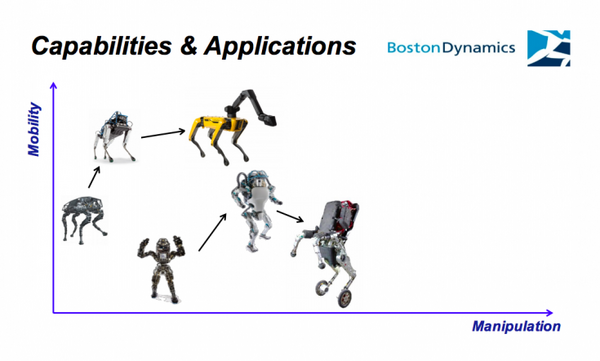
これは、移動性能と操作性能のグラフです。
まず私たちは「ビッグドック」で移動できるようになり、外出ができるようになりました。
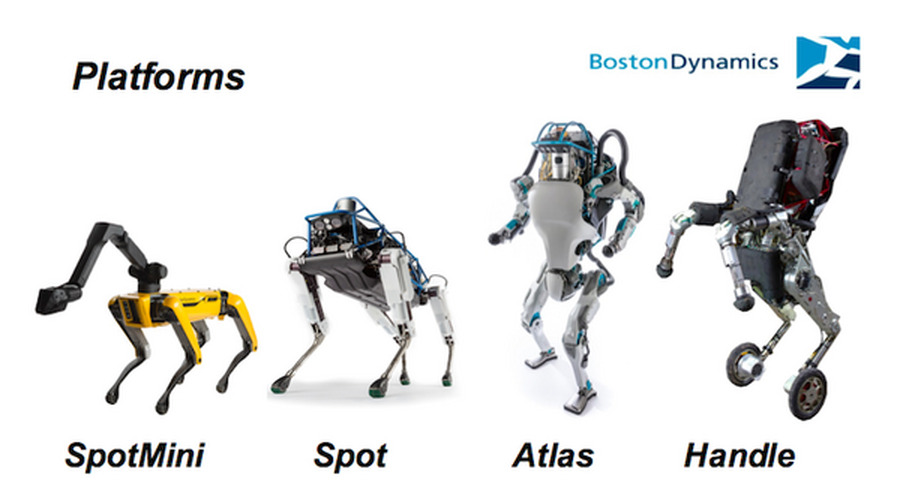
その後にヒューマノイドロボット「アトラス」を開発し、移動性能は高くないものの、操作性が高まりました。そしてスポットでは、本当に過酷な地形においても移動できるようになりました。スポットミニではアームもあるので、操作性能も上がりました。それからハンドルですが、これはアトラスから派生したロボットです。シンプルで実用性の高いロボットです。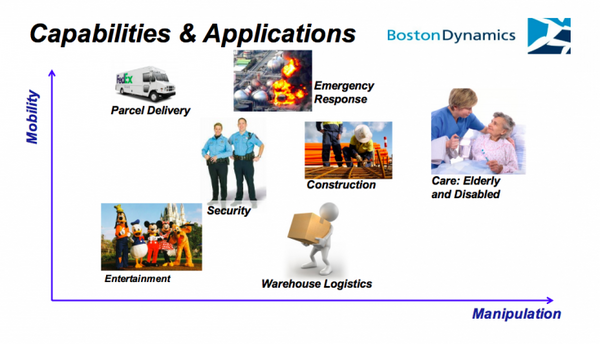
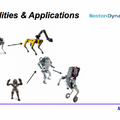
では、次にロボットは何に活用できるかということを考えてみましょう。エンターテインメントに関しては、ロボットの可能性を活かせる場所と言えるでしょう。人が集まるショーにロボットを連れていくと、みんな喜んでくれて、一緒に写真を撮りたがります。それからデリバリーでも活用されるでしょう。倉庫においては、約1兆個の荷物が動いているわけです。それだけの小包みが人間によって運ばれています。まだ自動化はほとんどおこなわれていません。
そして警備。これは来年くらいにはもっと色々なケースが出てくるのだと思います。建設は難しい領域ですが、アプリケーションのチャンスがあると考えています。私はパートナーと一緒に福島に行ってきました。ここではロボットで継続的な取り組みが行われています。人間が入っていくことが難しい場所にロボットを入れるというのは、重要な取り組みです。そして、一番大きな分野は介護です。私の母親にもロボットを活用した介護をしてあげたいですし、私自身が介護が必要になった際には、子供たちには子供達にはロボットを活用してもらいたいと思っています。
短期的に実現できるものと長期的に実現していくもの。未来の計画というのは、限界を取り除いて進化させていく必要があります。
まとめ
今回の講演は、ロボット開発者にとって、刺激的で参考になる部分も多い内容だったのではないかと予想している。特に、壊しながら直していくという考え方は、ボストン・ダイナミクスのロボット達の進化のスピードを早めている要因であり、多くの開発者が参考にすべきポイントなのではないかと思う。
ソフトバンクがボストン・ダイナミクス買収の合意に至ったことで、このような世界最先端の研究者による講演を、日本人が聞くことができるようになった。だからこそ、今回の講演を聞いて、改めてソフトバンクに感謝したいと思った。
