








パナソニック株式会社と学校法人千葉工業大学は2017年12月13日、「パナソニック・千葉工業大学産学連携センター」を千葉工業大学の津田沼キャンパス内に設立したと発表し、記者会見を行った。千葉工大のロボット技術・知能化技術と、パナソニックの信頼性の高い家電製品の企画・開発力とを融合し、アイデア創出から具現化、製品化に向けた技術開発を大学と企業の両者で共同で取り組んでいく。2、3年から5年くらいを目処に「新しいくらし価値」を発信することを目指す。
センター長は、千葉工業大学 未来ロボット技術開発センター(fuRo)所長で同大学常任理事の古田貴之氏。副センター長はパナソニックアプライアンス社常務技術担当・(兼)技術本部長の渕上英己氏。
古田氏は、基礎研究のR&Dだけでなく企画アイデアの創出、製品開発を前提とした大学との産学連携拠点の設立は「国内では極めて稀なケース。産学連携の新しいスタイル。イノベーションが加速されて日本の産学連携の姿が変わるのではにないか」と述べた。
fuRoについて古田氏は、学校法人が直営する研究所であり、大学というよりも法人が経営する企業であり、ロボットに関する専門家が在籍していると紹介した。スライドのなかには未発表のヒューマノイドも写っている。
連携成果第一弾はSLAMを用いたロボット掃除機か

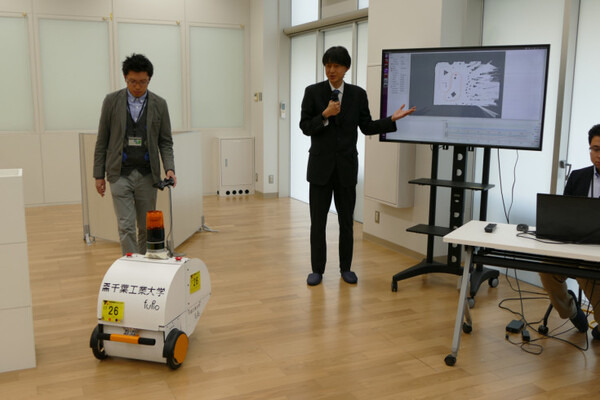
連携第一弾として、パナソニックは千葉工業大学 未来ロボット技術開発センター(fuRo)の持つ空間認識技術「ScanSLAM」を活用し、次世代ロボティクス家電の製品化に取り組む。「ScanSLAM」は、他のSLAM技術(Simultaneous Localization & Mapping。カメラやレーザーセンサーを使って自己位置同定と地図作成を同時に行う技術)に比べて高速処理が可能だという。
古田氏は、大学の研究をベースにしたイノベーティブなロボット製品や事業が日本では事例が少ないと述べ、それは、製品や事業の出口イメージを持ちながら中期的な研究が行われていなかったこと、事業化のためのパートナリングの仕組みがなかったことなどが課題であり、中長期的なビジョンを共有して同じ場所で膝詰めで企画・研究・開発を行うことが重要だと述べた。
パナソニックアプライアンス社常務 技術担当・(兼)技術本部長の渕上英己氏は、産学連携センターについて「パナソニックにとっても大きな意義がある」と語った。パナソニックは重点技術領域の一つにIoTやロボティクス領域をあげている。「製品開発を前提としたセンターの設立は国内では稀」と再び繰り返し、千葉工大の有する先端技術をパナソニックでスピーディに実用化することでロボティクス家電の実現にむけて前進が図れると述べた。
渕上氏は「パナソニックではこれまで家事労働の解放を目指してきたが、近年、家事労働時間はほぼ横ばい。ロボティクス技術を使って再び労働時間を短縮させたい。ご期待いただきたい」と語った。具体的な第一弾としては、SLAM技術との相性がいいロボット掃除機への適用を想定するという。ただし他の分野についてもロボット技術適用を模索していく。中核としてはアプライアンスだが、他の領域への活用も考える。ぶらさがりでは顧客に価値が提供できるもの、基本的な性能の向上や、顧客が考えているような動きができるものを目指すという。洗濯や調理などの自動化、個別だけでなく、ネットワークやAIを活用し、顧客がやりたいことがよりできるようにすることを狙う。
技術力の深さと目指す未来が一致
今後、パナソニックアプライアンス社から千葉工大に10数名程度技術者を派遣して、一緒に研究開発を進めていくことになる。
千葉工大とパナソニックの連携に至った理由について、渕上英己氏は、fuRoがSLAM、画像認識、制御などで様々な技術を持っていることと、出口を想定した活動をしていることなどから、連携して事業化への成果が他の取り組みに比べてスピーディにやっていけるのではないかと考えたと述べた。また人材育成にかかる時間を考えて、連携したほうがより高速で事業化の加速ができると考えたようだ。
古田氏は連携の理由について「fuRoは研究開発団体だが、重要なことは未来を作る、新しい価値観を作ること。そのポリシーがパナソニックと合致した」と語った。また、古田氏自身が家電を見たり触ったり分解したりするのが好きな「家電マニア」であることも、本人としては嬉しかったようだ。
ScanSLAMについて

ScanSLAMは処理速度が速い点が特徴だ。二次元のレーザースキャナーでSLAMを行うときに、相関補完を行うためのスキャンマッチングという過程がある。いくつかの手法のうち、ScanSLAMではそのうちICPというアルゴリズムを使っており、点群をそのまま直接使うのではなく、前処理をして扱いやすくしている。他にも最適化技術がいろいろあり、それらの積み重ねで高速化を行っている。
「SLAMの基本技術は出揃っており、どれか一つですごいというのはない。各手法をどうやって組み合わせてチューニングするかがミソ」と開発者であるfuRo
副所長の友納(とものう)正裕氏は語る。「相性がいい技術をどうやって組み合わせるか、全体が速く動作するにはどのように設計をするか」が重要だという。
高速化実現するための特徴はもう一つある。SLAMでは同じ場所に戻ったときにループを閉じる「ループ閉じ込み」の処理が重要だ。そこにも独自技術を使って、より高速に処理できるようにしている。「グラフベースドSLAM」といわれる最適化に基づく手法で、特徴点を使って同じ場所に来たことを見つける技術と、地図の歪みを補正する技術、それぞれの過程において、小さくて軽いプログラムで処理できる内製の技術があるのだという。
オープンソースのパッケージをそのまま持って来たものとはだいぶ違うという。また、それを作った人と一緒にやるのであれば、より深く理解しながら高速に開発を進めることができる。パナソニックとしてはそう考えたのかもしれない。





