







サンノゼで3/26~29に開催されている「GTC 2018」において、NVIDIAの創業者兼CEOであるジェンスン・フアン(Jensen Huang)氏が行った基調講演で、NVIDIAが取り組んでいるロボット開発環境「ISAAC」(アイザック)を新たに正式発表した。
ステージ上で紹介したムービーには自律的に走行する3ホイールのロボットがオフィスや施設内を自由に動き回る様子が紹介された。ロボットの上部にはLIDAR(レーザーセンサーの一種)が装備され、自動運転車のように周囲の状況を把握して、障害物や人にぶつからないように移動する。
また、展示ブースではISAACの開発環境でトレーニングしたABBの双腕ロボットをデモ展示。人間の生活に貢献できるロボットの動作を紹介した(本ページの末尾で動画を紹介)。
「ISAAC」とは何か?
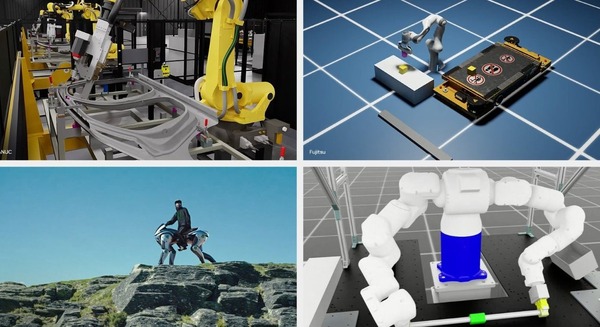
ISAACはこれまでロボティクス分野における機械学習のシミュレーターとして紹介されてきた。例えば、コンピュータ画面内のCGのロボットに、ゴルフのパターを機会学習させるシミュレーターだ。パターでゴルフボールをカップに入れるための基本的な動作を教え、何度か練習を積んだ後で、グリーンの斜度や芝の長さや向きなどのホールごとの個別の要素を学習することで、様々なホールでもパターでボールをカップにしずめるトレーニングのシミュレーターシステムがISAACだった。(少なくとも著者の認識はそうだった)
それが今回の発表で、ISAACの具体的な将来性が見えてきた。コンピュータ画面の中でCGロボットに機械学習を導入し、トレーニングして学習精度を高めた後で、そのシステムをリアルなロボットに反映することで、実際のロボット開発環境を効率化するプラットフォームとして「ISAAC」を展開する段階に来たことを意味する。
「GTC 2018」の基調講演の中で、ジェンスン・フアン氏は次のよう語っている(要約)。
フアン氏
将来的にはロボットはさまざまな場所で私たちを助けてくれる存在になります。私達の身体能力を拡張したり、アシストするようにもなるでしょう。買い物を例に取ると、以前は買い物をしに自動車を運転してお店に買いに行く必要がありましたが、将来的にはお店や商品が家に来てくれるようになるのです。そしてこのような変革が、様々な分野の産業で起こるのです。それぞれの産業にある課題、不可能だったこと、心配だったことや、そして大変だった作業などをシンプルにこなすことを、AI技術と自律型マシンが可能にするのです。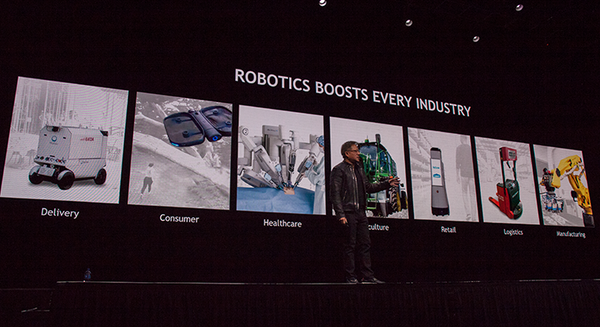
そこで、私たちはDRIVEシリーズ(自動運転のAIコンピュータ)を開発してきたのと同様に、ロボット向けのプラットフォームを作りました。私たちはそれをISAAC(アイザック)と呼んでいます。
今日は、その初期段階のバージョンをお見せしたいと思います。これは素晴らしい成果です。
近い将来、ロボットの開発はシミュレーション上で行うようになるはずです。ロボットは3次元の世界で活動しなくてはならないのですから、それを高いレベルで実現するには、三次元シミュレーターでの開発が重要です。これを「アイザック ラボ」と呼んでいます。この「アイザック ラボ」では、ロボットや自律型マシンにとって、現実の世界のような複雑な状況に欠かせない知覚機能、ローカライズ機能、マッピング機能、そして、計画機能のデモンストレーションやシミュレーションを繰り返し行うことができます。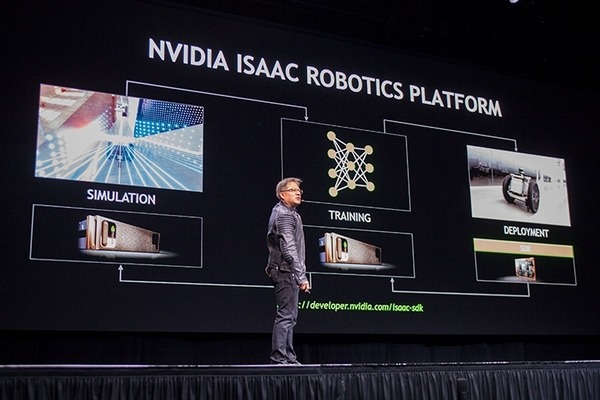
私たちのディープラーニング技術を駆使して、何度も難しい状況の対処を機械学習したシミュレーションを行うことで、ハードウェアに落とし込んだときには、考え得るさまざまな状況をクリアできるようになっているようにするのです。
この開発キットを「アイザックSDK」と呼んでいます。「アイザックSDK」では、ジェットソン(NVIDIAのエッジコンピューティング用のAIボード)と連携したり、展開していけると考えています。一例として、短いビデオをこれからお見せします。もし、これを見て、興味を持った方は私達のウェブサイトにアクセスしてください。そして、ぜひあなたの意思を聞かせてください。そうすれば、私たちはあなたに「アイザックSDK」を提供することができるでしょう。さぁ、お待たせいたしました、これがアイザック ロボティクス プラットフォームです。
ハードウェアの開発はテスト&フィックス、トライ&エラーの繰り返しだ。これはとても時間と予算がかかる。ISAACが理想とするシミュレーション環境でこれが代替できれば、ロボットの開発が短期間で効率良く、ローコストで行えるようになる可能性がある。
フアン氏
私たちの新しいプラットフォームは、ロボティクスの将来であり、新しい開発システムです。そして、私達が製品化しているこの小さな小さなAIコンピュータ「ジェットソン」は、何年も自律型マシンを作るために既に使われてきました。
展示会場では「ISAAC」のSDKの紹介とロボットをデモ
ISAACによって、開発された双腕ロボットのデモを展示会場で見ることができた。
ディープラーニングを最終的に使うプロセスをISAACで開発したもので、このロボットは上方に設置したカメラで自身やタンス、引き出しの位置等を把握し、それに合わせてどのように動けばいいかを自律的に判断して動作している。
引き出しを開けたり、閉めたり、バナナをしまうといった作業は、人との協働を意識して作られている。将来、病院や高齢者の家でもこのロボットが人の生活に貢献できるよう、「順応性」と「優しさ」が重視されている。バナナは柔らかいので、持つ力をソフト制御したり、引き出しも静かに閉める動作にそれらのコンセプトが見て取れる。
■動画
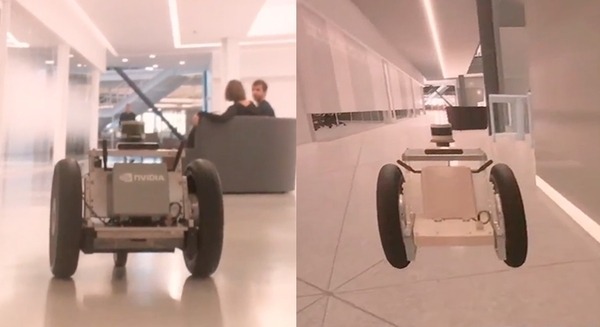
また、展示ブースでは、基調講演で紹介された移動型ロボットの展示もあった。NVIDIA製のクレジットカードサイズのAIコンピュータボード「ジェットソン」が内蔵されているロボットだ。ディープラーニングはビジョンや位置情報など、さまざまな把握や判断に利用しているが、ジェットソンを搭載することでリアルタイムの判断力の強化を行うことが可能だと言う。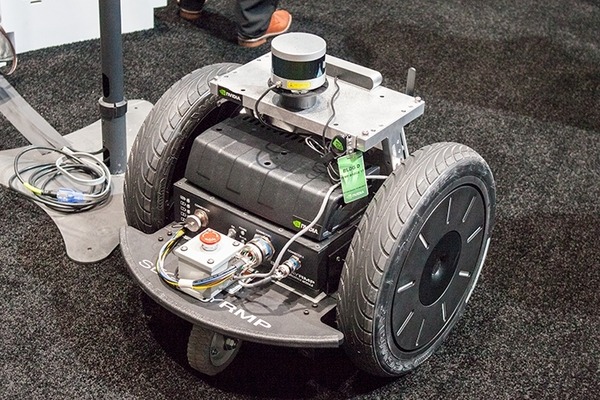
このロボットはデリバリーや監視など、移動することが主な目的として作られているが、これに腕を追加することで、マニピュレーションが必要な作業にも対応できるとしている。

(Featured Ayuka Alyson Kozaki)
【GTC 2018】NVIDIAのロボット開発環境「ISAAC」(アイザック)とは? ロボット活用と開発の未来をAIが変える ~SDKも発表~
【GTC2018】基調講演で「Holodeck」を使って無人の車を遠隔操縦!観客騒然!自動運転には遠隔操作も必要か
【GTC 2018】NVIDIAのCEOが基調講演でAIとディープラーニングの未来を語る!自動運転、ロボット開発環境、リアルタイムレイトレーシング、世界最大のGPU「DGX-2」等を発表
【GTC 2018現地レポート】トヨタAI研究所「Toyota Research Institute」が開発する2モードの自動運転ソフトウェア!AWSや開発環境も公開
GTC 2018特集 (ロボスタ)
NVIDIA特集 (ロボスタ)
GTC 2018 公式ページ(英語)