



国立研究開発法人科学技術振興機構(JST)と電気通信大学主催による「電気通信大学 新技術説明会」が2018年5月10日に東京・市ヶ谷のJST別館にて行われた。JST「新技術説明会」とは、産学連携による研究成果の実用化を目指して新技術や産学連携に関心のある企業関係者に向けて研究者自らが直接プレゼンするタイプの説明会。今回の電通大の技術説明会ではロボット関連の二つのプレゼンテーションも行われた。レポートする。
ロボットハンドによる柔軟物の操作

電気通信大学 大学院情報理工学研究科 情報学専攻 准教授の工藤俊亮氏(http://www.taka.is.uec.ac.jp/utf8wiki/)は、柔軟物を扱うロボットハンドの研究について解説した。人間がロボットの前で手本を見せるだけでロボットに対してやらせたい作業を教示できる「見まね学習」の実現を目指している。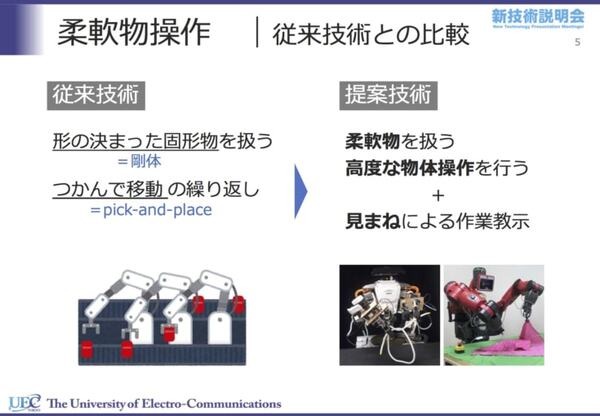
工藤氏は情報システムと生活空間をロボットを使って結びつけることを目的として研究を進めている。そのなかでひもや布、紙など柔軟物は複雑に変形し、動きが予測しづらく、高度な操作技術が必要な対象だ。その一方、日常生活ではよく使われるものなので、ロボットを生活空間に入れるためには柔軟物を扱う技術が重要となる。生産工場でのロボットは多くの場合、形の決まった剛体を扱い、かつ、定型の繰り返し作業をすることが多い。それに対して日常生活で使われるロボットは高度な物体操作を必要とするため、見まねによる教示ができないかと考えて研究を進めているという。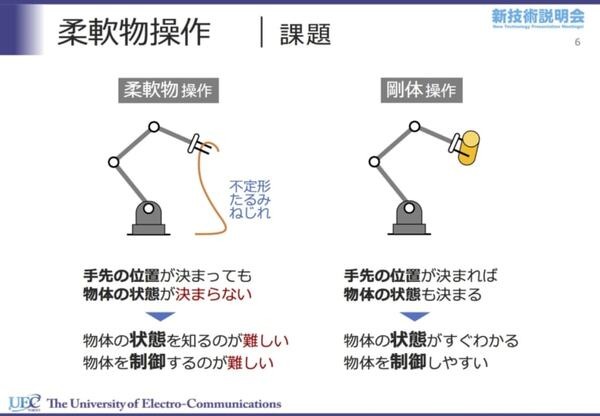
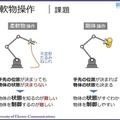
剛体操作の場合は、手先位置が決まれば物体の状態も決まるため、関節角度がわかれば物体の状態もすぐわかるし、制御も容易だ。いっぽう柔軟物ではこれらは成り立たない。不定形だし、たるみやねじれの影響も受けるからだ。対象物の状態を知ることも難しく、目的のかたちに持っていくための制御も難しい。
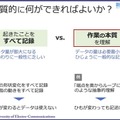
では、これらに対して人間はどのように対処しているのか。工藤氏は折り紙や結び方の解説書を例示した。人間は大雑把な手順書から、何をすべきか、作業の本質を理解して実行することができる。柔軟物は自由度が大きいので、ロボットもこのくらい大雑把な情報から本質的にやるべきことを見出して、実行できるようになるほうがベターだ。つまり、対象の形状・変形過程などを全て観測・記録してモデルを作り、計画して、そのまま実行するといったやり方ではなく、「端点を奥からループに通す」といった、作業自体の抽象的理解ができれば、「お手本を理解して実行する」ような作業が可能になる。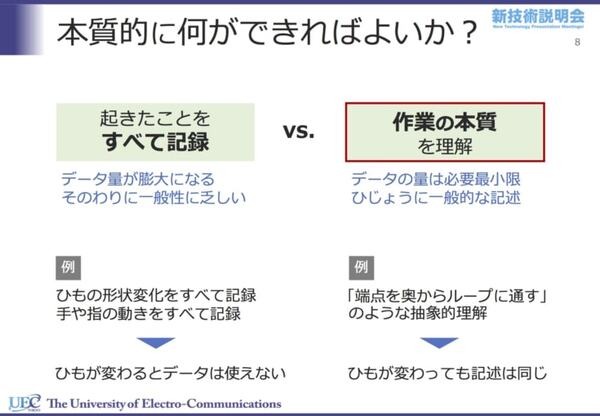
たとえば折り紙を人が折って見せるとその動作を抽象的なレベルで認識し、作業ができるようになれば、人とは身体の異なるロボットであっても人の作業を実行させることができる。それらをロボットに行わせるためには1)作業の記述方法、2)人の作業の認識、3)作業の再現方法といった研究が必要になる。工藤氏は、研究としてもっとも面白いのは1)、すなわち数理モデルや対象作業に関する知識の部分だが、企業とは再現の部分に注力したいと考えていると述べて、デモ動画を示した。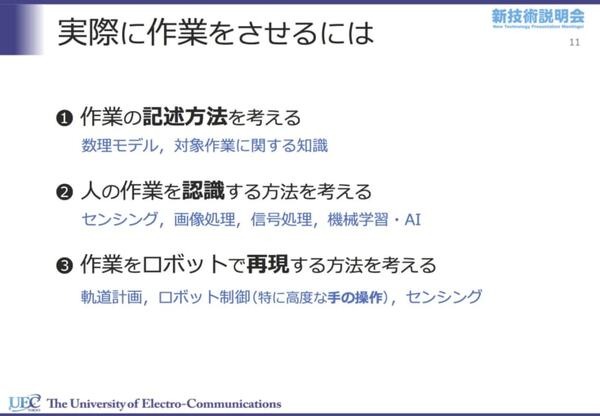
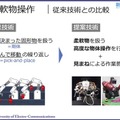
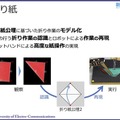
具体的には、まず、操作前の画像と操作後の画像を比較し、差分を取る。そしてどこをどう動かしたのか推測する技術を開発したという。工藤氏らが開発したこの技術を使うと、たとえばヒモの端点をどのように動かしてループに通したのかといったことをロボットが理解して実行できるようになる。ロボットはヒモの変化を見て、指示された結び方を実行する。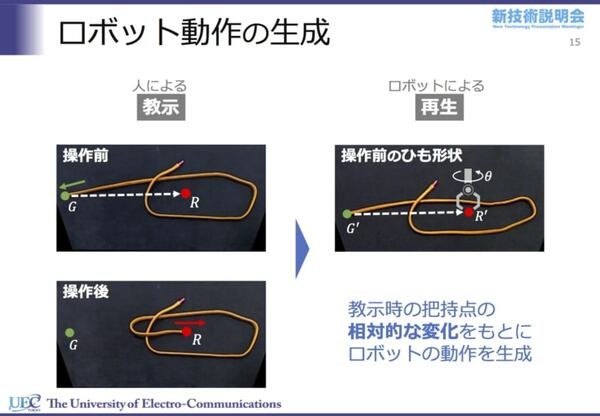
折り紙の場合も同じで、どういう折り方の記述があるか数学的に記述した「折り紙公理」を利用しつつ、操作前と操作後の画像を比較して、どの頂点とどの頂点をくっつけるように折ればいいのかをロボットが自動で認識して、実行する。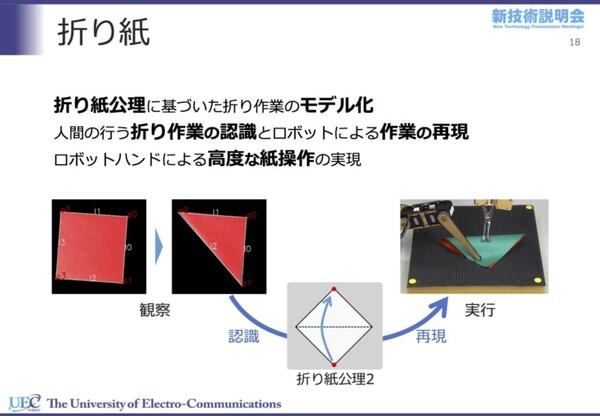
空中でひもを結んだり、ひもをねじり、そのねじりを利用してヒモを目的のかたちに置いたりするといった作業にも成功している。柔軟物の操作やねじれやたるみの影響が大きく、そのあたりを一つ一つ考慮しないと、うまく動かないという。
折り紙の折りに関しても、何も考えずに折ると下手な折り方になってしまう。それに対してカメラを使って頂点をちゃんと認識しながらフィードバックしたり、「袋折り」のような折り方の場合には、いったん折りクセをつけた後で折るといった作業も必要になる。
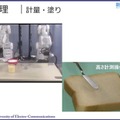
また、ポールにテープを巻きつけるときに、ワークの持ち替えを教示ではなく自動で持ち返させたり、包丁で硬さの異なる果実を同じプログラムで切らせたり、粉や液体を塗るといった作業を、いずれも多指ハンドを使ってやらせる様子も示した。
工藤氏は「ケーブルや布や食品を扱う技術は産業用にもニーズがあるのではないか」と語り、柔軟物操作へのニーズがある企業との共同研究につながることがあればとまとめた。基礎研究ではあるが、特定の用途に絞り込んだ技術ではないので、逆に多様な用途に使えるのではないかと考えているという。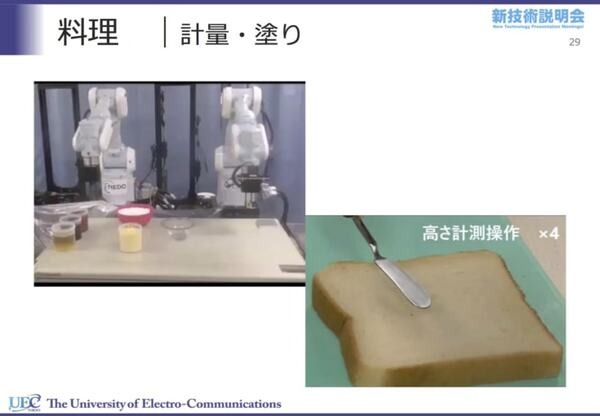
1mの段差や階段も登れるヘビ型ロボット

次に、電気通信大学 大学院情報理工学研究科 機械知能システム学専攻 准教授の田中基康氏(https://sites.google.com/site/motoyasutanakalab/)が、細長いヘビ型ロボット(索状ロボット)の研究成果についてプレゼンした。狭所進入だけでなく障害物乗越え性能も高く、操作が容易な制御技術を開発したという。
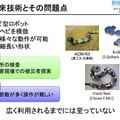
田中氏は、まずヘビ型ロボットについて、細長い形状のため様々な動作が可能なため多くの研究があるが、関節数が多く操作が難しいという課題があると紹介した。田中氏は生物の動きの再現ではなく、数式モデル化と制御アプローチによって生物を超える動きの実現を目指しているという。
田中氏らの開発したヘビ型ロボットでは、頭を持ち上げても倒れないように制御したり、外乱対応や複雑環境への対応などを実現している。いずれもあくまで生物の真似ではなく、全く新しい動きを実現することを目指していると強調した。それらを利用してマッサージや掃除、災害予防などをアプリケーションとして研究していると述べ、特に災害予防アプリケーションを想定したプレゼンを行った。
内閣府 革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジの研究の一環として田中氏らが開発した新しいヘビ型ロボット「T2 Snake-3」は、全長1.7m、重さ9kg。27個のモーター、両端にカメラを持ち、ゲームコントローラで操作ができる。無線遠隔操作で80分動作できる。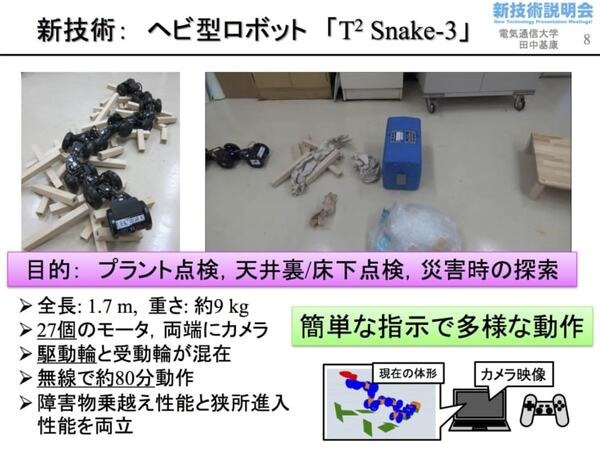
基本構造は横に動く関節と縦に動く関節の連結。片側を受動輪として内部にバッテリーを配置することで小型化しつつ80分間の動作を可能にした。センサーを活かして半自律動作階段昇降のほか、グリッパを活かした作業などが可能だ。
特徴は、簡単な指示による多様な動作の実現だ。操縦者は基本的に先頭の動作を指示するだけでいい。そうするとロボットは先頭の動作を後続に順々に伝えていく。この動作は「シフト制御」と呼ばれる技術によって実現している。連続的な曲線を作り、それに離散的な胴体をフィッティングして必要な角度を求めている。非常にシンプルだが多くの動作ができるという。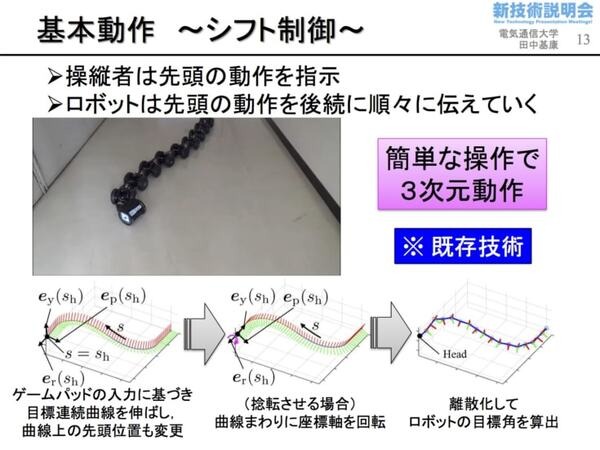
たとえば狭くて細い通路を通ったり、谷渡りなども可能だ。1mの段差を超えることもできる。簡単な操作で、狭いところにも行けて、かつ、高い障害物も乗り越えることができる。全長の6割の段差まで乗り越えることができるのはヘビ型のなかでもトップクラスだという。障害物の上が平面である必要もない。
シフト制御中に脱力すると、重力によってロボットのボディは下に垂れる。環境にならった姿勢から、もとの連続曲線を再構成することで動作を途中から再実行することもできる。つまり複雑な環境に、ある程度ならいながら、移動していくことができる。連続斜面でも脱力してならい、動き、またならって動くといった動き方の連続で、複雑な場所でも比較的容易に動ける。たとえ横転したとしても、復帰できる。
多連結ロボットは一般に階段が苦手だ。関節部が段に引っかかってしまうからだ。そのため多くは車輪を大きくしたり、関節部をなくすことで対応する。それに対して田中氏らは、距離センサーを用いて体形を適切なタイミングで動かすことで、段差に引っかからないようにした。こうすることで、登れるか登れないかの判断が奥行きや高さなど幾何学関係だけでできるし、縦の蹴上面があるかないか、階段の勾配に影響されず、登れるようになった。
実用を考えると、移動した先で作業をする必要がある。そのために先端にグリッパをつけて、作業をさせることを考えた。田中氏らはまずロボットの端部(頭部)を自在に動かす技術を開発した。現在、ハンドは、東北大学 多田隈建二郎研究室が開発している、粉体を膜で閉じ込め、空気を吸引すると硬くなる「ジャミング膜グリッパ(https://www.jstage.jst.go.jp/article/oukan/2017/0/2017_C-3-6/_pdf/-char/ja)」をつけて、バルブなどを開けることができるようになっている。
そのほか、10kg程度と軽量であること、接触点が多く天井裏などでも使いやすいこと、関節数が自由に変更できるといった利点を挙げた。今後は、防塵防水化し、現場での実証試験と用途別カスタマイズを狙う。企業には具体的用途の提示と、実機/制御のカスタマイズを期待していると述べた。実証実験用の機体の貸し出しなどが可能だとのこと。
企業との共同研究によって、各々のロボットの実用化や、研究のさらなる発展へと繋がることを筆者としても期待している。