





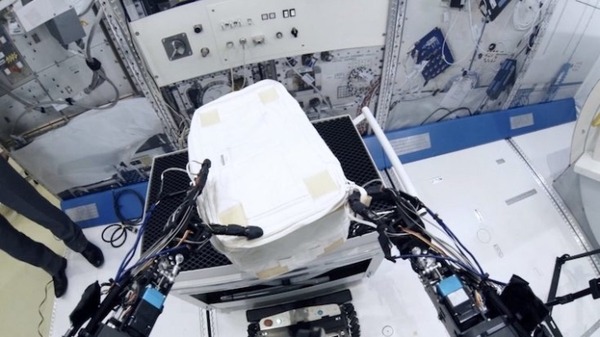
株式会社メルティンMMIは、JAXA(宇宙航空研究開発機構)筑波宇宙センターにおける国際宇宙ステーション「きぼう」日本実験棟模擬フィールドにおいて、ロボット遠隔操作による宇宙飛行士の作業代替を目指す、アバターロボットMELTANT-αを用いた初期実証を実施したことを発表した。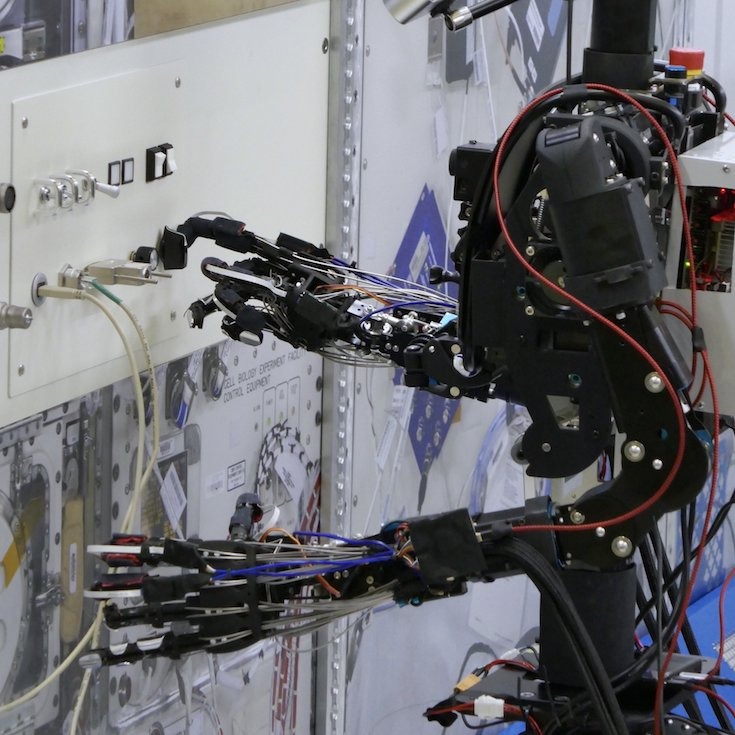
メルティンMMI社は身体による限界を突破し、人類の創造性を開放するためのサイボーグ技術の開発を目指し、その第一歩として、身体の動作を忠実に解析する「生体信号処理技術」と、生体模倣から着想を得た「ロボット機構制御技術」で実用性の高い筋電義手を開発してきた。
その開発経験を活かして開発されたアバターロボット「MELTANT-α」は、力強さと繊細な動きを両立した「人間の手に近い」ロボットハンドを備えることで、「従来のロボットハンドには困難であった複雑で柔軟な作業が可能となりました」と同社は述べている。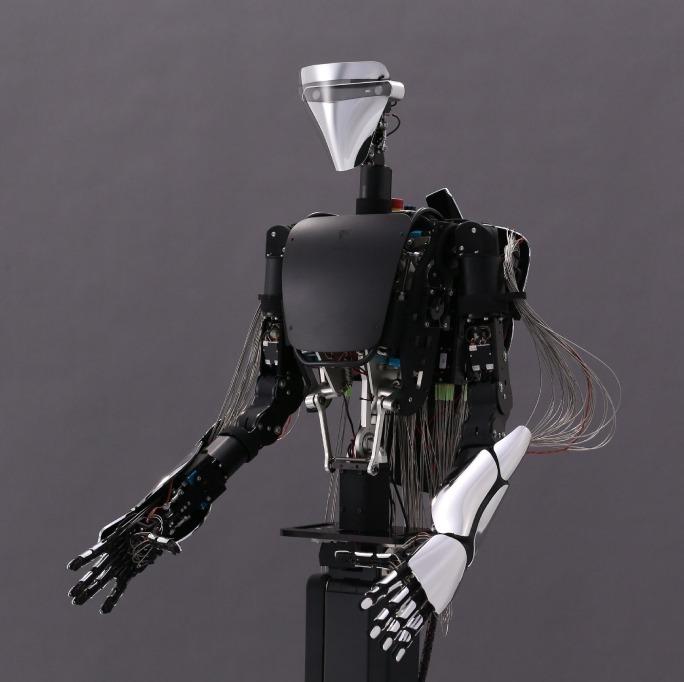
運用に多額のコストが掛かる有人宇宙計画において、軌道上の宇宙飛行士の作業時間は非常に貴重なものだ。国際宇宙ステーション(ISS)においては、宇宙飛行士の高い自然科学分野の専門性により日々様々な実験が行われているが、中には高い専門性が不要な作業(=定型タスク)が存在する。専門性の高い宇宙飛行士の作業時間をできるだけ多く確保し、効率化するため、定型タスクの作業代替や自動化が求められている。
そこでJAXAでは、地上からのロボット遠隔操作による定型タスクの代替や、自動化や自律化による作業代替の検討を始めている。メルティンMMI社は、2017年度にJAXA筑波宇宙センターにおけるISS内「きぼう」日本実験棟模擬フィールドを舞台として、MELTANT-αを用いた初期の実証実験を実施した。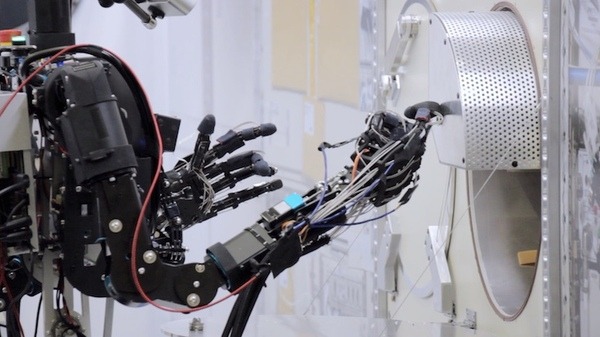
スイッチなどは人間による操作が前提とされているため、そこで作業代替するロボットには人間に近い能力が要求される。
MELTANT-αのロボットハンドは、人間と同サイズでパワー・スピード・自由度を兼ね備えているので、今後も継続的に模擬フィールドでの実験を繰り返し改良することで、「多様でハイレベルな作業代替を短期間で達成できる可能性があります」と同社は述べている。
