



電気通信大学による「第14回 産学官連携DAY」が2018年6月20日に開催され、研究室公開や100周年記念特別企画シンポジウム、ベンチャー企業のプレゼンテーションなどが行われた。電通大は文部科学省の「研究大学強化促進事業」に選ばれている大学の一つで、Diversity、Communication,Innovationを重視する「D.C.&I.戦略」を基本戦略目標として掲げている。
電通大 人工知能先端研究センター(AIX)
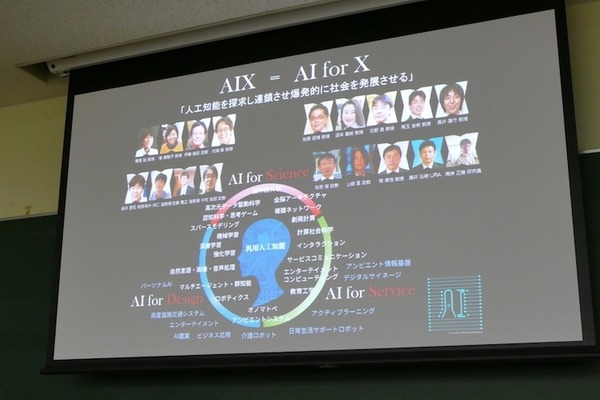
シンポジウムでは、機械知能システム学専攻教授で、2018年4月からは人工知能先端研究センター長もつとめている長井隆行氏が登壇し、人工知能先端研究センター(AIX)について紹介した。AIXには「AI for X」という意味が込められており、AI技術の様々な分野への適用、特に人と共生することができる汎用性の高い人工知能システムの実現を目指している。
AIXでは研究プラットフォームの一つに図書館を活用している。たくさんのセンサー、カメラ、マイクが各所に埋め込まれており、中の情報を常に取得できる。情報を解析し、いかにその空間を快適にするかといった研究を行っているという。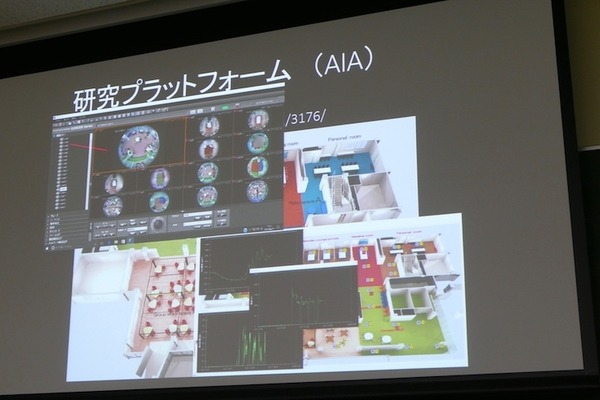
汎用AIの実現を目指す電通大AIXでは、アンビエントなAIが「妖怪」のように人と寄り添って柔軟かつスマートにサービスを提供できる技術を理念として目指している。だがその目標の達成は、表面的にはうまくやりとりするようなエージェントを作れたとしても、少し考えると深刻な困難に直面してしまう状況が少なくない。では、どうするべきか。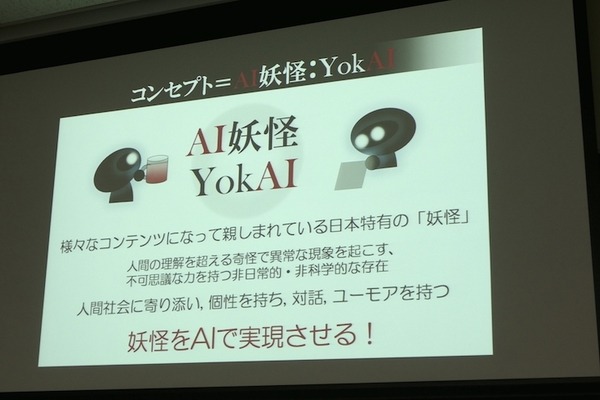
言語や概念を学習するロボット
長井氏は言語理解や相手の意図を読むためには身体の存在が重要だと考えていると述べ、長井研究室(http://apple.ee.uec.ac.jp/isyslab/)で取り組んでいる、確率モデルを使ってロボットに概念や言語を学習させる研究を紹介した。赤ちゃんのような状態のロボットに対して、ひたすら物を見せながら同時に言葉を発するといったインタラクションを何度も繰り返すことで、ロボットが各種外界センサーや自分の関節角度情報から、徐々に「概念」を獲得する。
1ヶ月くらいの連続実験によって、ロボットは一歳半程度の語彙を持ち、500個くらいの物体を識別できるようになった。概念の獲得には、過去の経験をうまく整理していくことが重要だという。
ハンドには感圧センサーもあり、触覚データも使うことで、対象が柔らかい物体であるといったことを学習する。また今後は、物品の概念だけではなく、どういう操作をするとどんなことが起こるかといった概念の獲得や、社会性の獲得も考えていくという。
家事を行うロボット

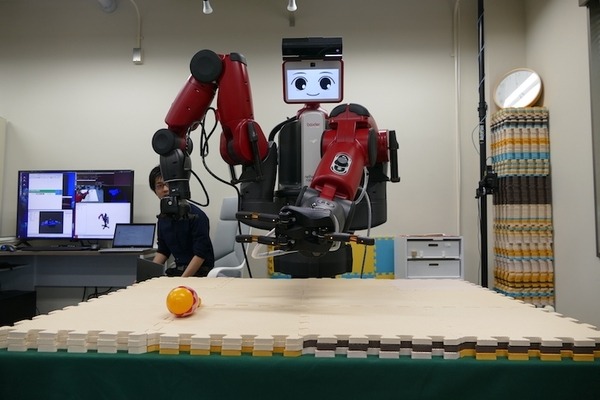
トヨタとは生活支援ロボット研究用のプラットフォーム「HSR」を使った家庭用ロボットの共同研究を行なっている。たとえばこんな研究だ。まず、人がロボットを操作して様々な家事を行う。現在のロボットは片付け作業程度であればハードウェア的にはある程度はできるレベルに達しているため、一定の作業ならば、こなすことができる。
それを学習データとして用いて、次はロボットが自分で学習していく。そうすると、ドアを開けたり、引き出しを開けたりといった動作が徐々にできるようになる。こういった学習を繰り返すことで、将来的には家事ができるロボットができるようになるのではないかというものだ。
ロボットは学習過程で自ら、自分の動作を分節し、柔軟に行動できるようになる。たとえば、ドアの開け方を細かくロボットに対して指定したりするのではなく、任意の位置からスタートさせても、ドアを開けるような作業が実現できる。
最近はシミュレータ上で学習させているという。シミュレーターを使うことで、ロボット実機を使うのに比べると高速で学習して、さらにそれをロボット実機に移すことができるようになった。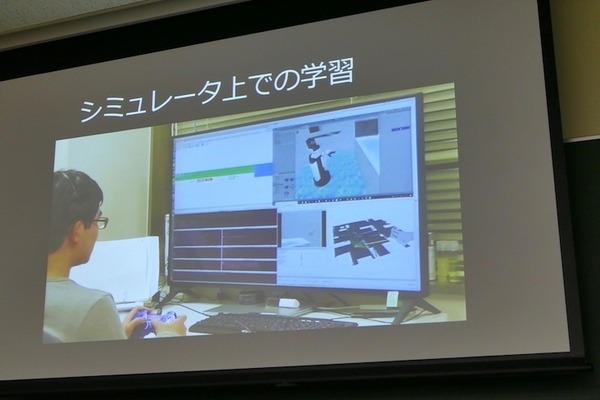
長井氏は「これが汎用AIにつながるかどうかはわからない」としながらも「人と同じ環境で暮らすことが非常に重要」と強調した。
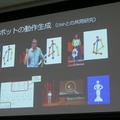
講演のビデオからロボットの自然な振る舞いを自動生成
また汎用知能を目指すロボットと人工知能の研究は産業的にも応用が可能な非常に広範な技術であり、企業の問題を解決できるものもあるのではないかと述べ、大日本印刷との共同研究例を示した。
講演のビデオから、しゃべっているときの人の自然な身振りを自動で学習させて、その動きをロボットに移して自然な動きを生成させたというものだ。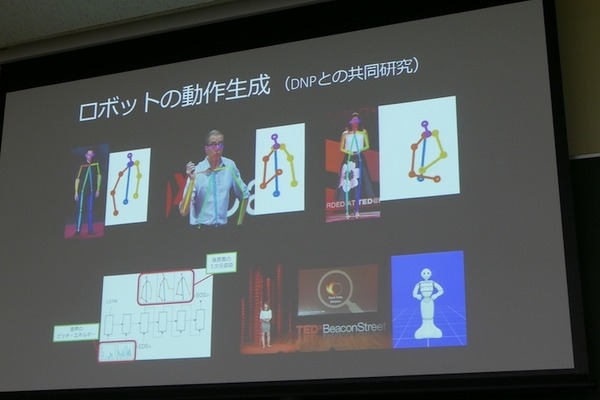
こういったアノテーションのついていない、いわゆる非構造化データであっても、最近の技術を使うと、機械学習用のデータに加工することが実際にできるというわけだ。
長井氏は最後に「難しい問題を本質的に解決するためには、現象を深く掘り下げて、その裏にあるものを掘り下げて理解しなければならない・そのためには多様なアプローチの結びつきが重要だ」と述べた。それがAIXのやっていることであり、連携企業を常に募集していると締めくくった。
家庭用遠隔保育ロボット ChiCaRo

このほか長井研究室では、阿部香澄氏が中心になって育児支援を目的とした家庭用遠隔保育ロボット「ChiCaRo(チカロ)」を開発し、2017年4月に株式会社ChiCaRo(https://www.chicaro.co.jp)としてベンチャーを立ち上げている。ちょっとした時間、家事などをするときに遠方に住む家族などにロボットを操作してもらうことで、少しのあいだ、子供の面倒を見てもらうというコンセプトのロボットだ。最長で約20分間程度ならば、コミュ二ケーションが持続できるという。