現在、産業用ロボット分野などで活躍しているロボットアームにはカメラを使ったコンピュータビジョン技術の導入が注目されている。ディープラーニングがカメラ映像を解析して物体を認識したり位置を特定する技術だ。今回、MIT(マサチューセッツ工科大学)が発表した「TurboTrack」を使った新しい技術はカメラを使わない。カメラの代わりにRFID無線を使って物体の位置を正確に把握するシステムだ。
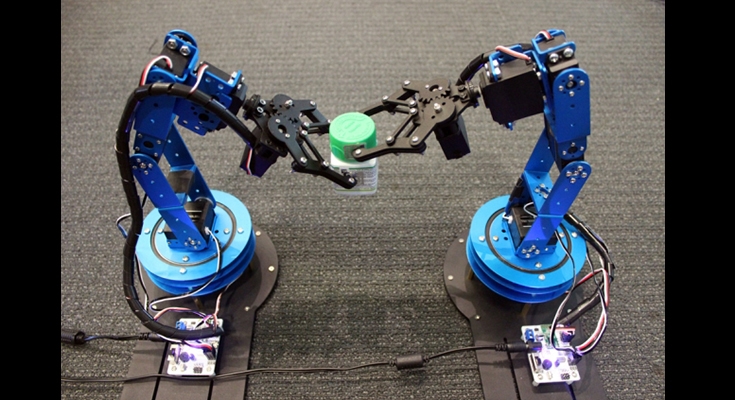
MIT NEWSなどが伝えている。(冒頭の写真はボトルとキャップにRFIDタグを貼付し、2台のロボットが高精度に位置を把握し、1台がボトルを持ち、1台がキャップを載せる作業を行う)
RFIDタグやその周囲に無線信号を送り、反射する信号を読み取って位置推定を行うしくみだ。物体が移動、すなわち動いている物体でも捕捉できる。
このシステムを搭載したアームロボットがRFIDタグを貼り付けた物体を認識する速度は平均7.5ミリ秒以内。誤差は1cm以内としている。
この位置測定(推定)技術は「コンピュータビジョンにとって代わったり、併用することで精度が飛躍的に向上する可能性がある」と一部の識者はみている。RFIDタグ自体の単価はわずか3セント、廉価だからこそさまざまな物体に気軽に貼ることができ、それによって応用の幅が拡がる可能性が大きい。また、コンピュータビジョンは明るくないと性能が発揮しづらく、逆光など光の向きによって視界を遮られることもある。雑然とした景色では物体を認識できない可能性もある。それを補完する役割も期待できる。ロボットだけでなく、ドローンやAGVなど、モビリティ分野でも活用できるようになるかもしれないし、特に複数のロボットやドローンがぶつからずに連携する、お互いの位置の把握にも活用できそうだ。
RFIDを使った位置推定技術
RFID技術を使って位置を特定する技術自体は以前から発表されている。RFルーカスは「RAIN RFID」(UHF帯RFID)装置を搭載したロボットの自動走行により、ICタグが貼付された全物品の位置を高速・高精度に特定する「P3 Mapper (Phase based 3D RAIN RFID locus Mapper) 」を開発したことを、2017年に発表している。RAIN RFIDは、電池無しタグで長距離(10m以上)、一括読取(秒間100以上)が可能。人手不足を背景とした業務効率化などのために普及を目指して進めている。
ABOUT THE AUTHOR /
ロボスタ編集部PR


このカテゴリの新着記事





注目のロボット









注目のロボット企業







連載・コラム

