



新進気鋭のロボット研究者や開発者たちが一般向けに講演する「このロボットがすごい2019」が、東京・早稲田大学で開催された「第37回 日本ロボット学会学術講演会(RSJ 2019)」最終日2019年9月7日のオープンセッションで開催された。オーガナイザーは佐世保工業高等専門学校電子制御工学科准教授の槇田諭氏。レポートする。
・「頑張るエンジニアはかっこいい」を広めるFukuokaNiwakaチーム
・宇宙ステーションでの遠隔操作ロボット実現を目指すGITAI
・安価高性能な義足提供を目指すBionicM
・ロボット自体が家庭内世界を電子化 PFNの全自動お片付けロボットを支える技術
「頑張るエンジニアはかっこいい」を広めるFukuokaNiwakaチーム

最初に登壇したのはロボマスターに出場しているチームFukuokaNiwaka/九州大学の花守拓樹氏。
「ロボマスター」とはドローンで知られる企業DJIが主催しているロボコンである。資金源が潤沢であり、極めてエンタテインメント性が高い競技となっている。優勝賞金は850万円だが他にも各賞がある。観客も数千人規模、スポーツイベントやライブ感ある会場演出で実施されており、さらに数百万人がオンライン観戦している。会場セットは毎回変わるが、競技内容は変えずに、継続性を持たせている。基本的にはかっこよく見せようとしている競技となっている。
■ 動画
なお、最近発売された「RoboMaster S1」は、ロボマスター発の教材ロボットである。
■ 動画
FukuokaNiwakaは、ニワカソフト株式会社をメインスポンサーとしているチーム。花守氏らは「日本のロボットは面白くない」と言われたこと、そしてそれに反論できないと感じたに発奮して、中国の競技大会に挑むことになったという。FukuokaNiwakaはインカレサークルに近いかたちで各大学の学生や、社会人たちが在籍している。
ロボマスターの競技は、高い攻撃力を持つが1台しかいないヒーローロボット、攻撃力は低いが小回りが利く歩兵3台、弾丸補給や回復ができるエンジニアロボット、守備をする哨兵ロボット、そして空を飛べるドローンからなる。ロボットはFPVで操縦されるので一台のロボットから見られる視野は限られている。ただしドローンはFPVであっても全体を見ることができるので指揮を行う上でも重要な役割を果たす。コンピューターゲームのようなルールは若干複雑だが、基本的には「基地ロボット」にダメージを与えてHPを削りきれば勝ちとなる。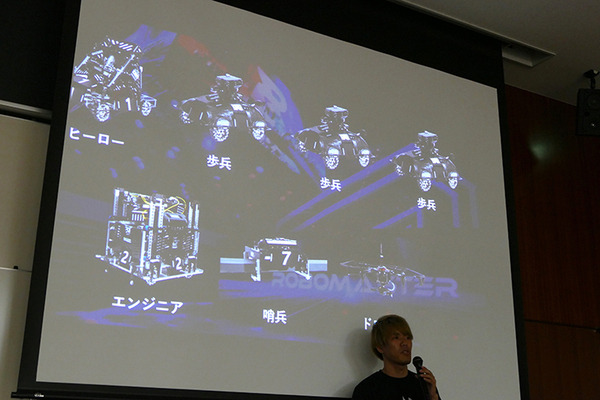
会場は総合体育館のような施設を実質3週間くらい貸切で行う。オペレータは直接フィールドを見ることはできない。各自がそれぞれのロボットの視点からのモニターを見て、インカムで連携を取りながら操作を行う。登録が終わったらロボットや選手はみんな綺麗にカッコよく写真撮影されて、その画像は競技の間の解説などに使われる。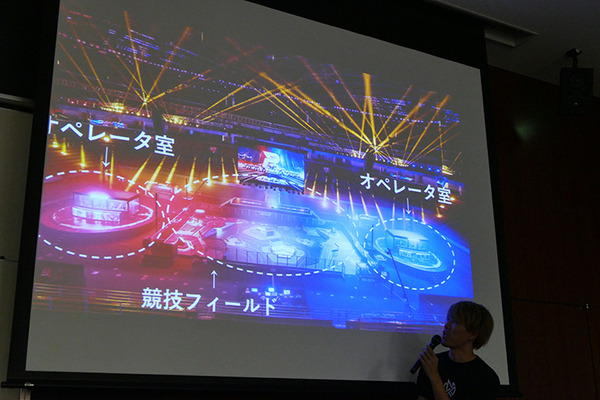
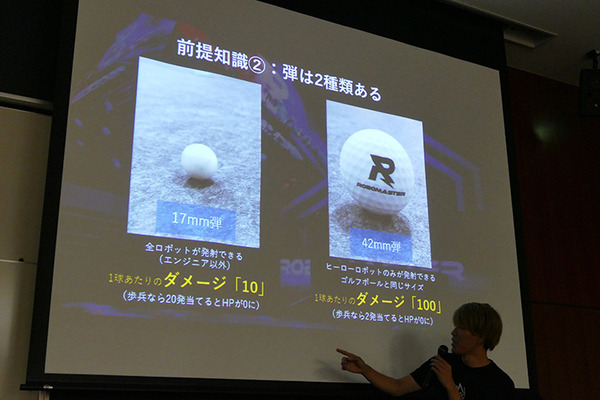
日本のロボコンとの最大の違いは「オートレフェリー」と呼ばれるジャッジシステムだ。ロボットに搭載されたセンサーからの情報をもとに、完全自動でジャッジが行われる。弾丸があたったか、どんな弾丸だったのかといったことも判別される。弾丸の速度や、連射によるオーバーヒートなども検出される。フィールドにもRFIDが埋め込まれている。一括管理されているので誤審が起こりにくいという。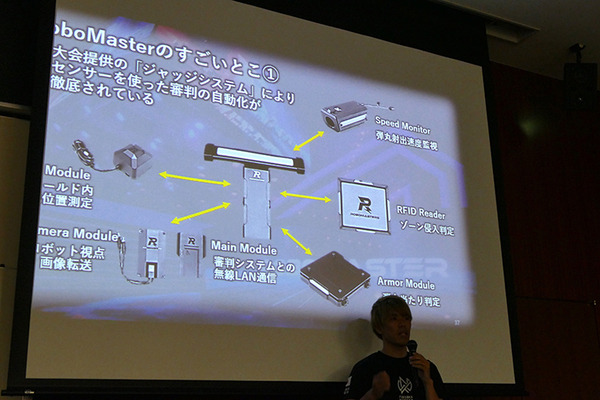
主催者側もロボットとフィールドを作って動作テストをしている。それによってルールの破綻を防ぎ、また選手との一体感があるという。またオープンソースが推奨されており、貢献が大きいチームには賞金が出る。これによって情報が残り続けるし、技術的交流が活発に行われるようになっている。
FukuokaNiwakaは昨年は世界ベスト16だったが、8/2から開幕した今年の大会では予選Cグループを首位で突破したものの国際トーナメント敗退となってしまった。全体の技術レベルが急激に向上しているからだという。
現在、2020年の日本大会開催に向けて準備が進められている(https://www.robomaster.jp)。スポンサー獲得と人材確保、そしてファンの獲得にも尽力していく。そして「頑張るエンジニアはかっこいい」ということを広めていきたいと語った。
宇宙ステーションでの遠隔操作ロボット実現を目指すGITAI

続けて、GITAI Japanの柴田彬氏が登壇した。柴田氏は「GITAIは宇宙で活躍するロボットの会社だ」と紹介した。GITAIは2016年創業のスタートアップで、ロボットを遠隔操作する技術によって、国際宇宙ステーション内で活動できる双腕ロボットの開発を進めている。自律では難しいタスクであっても臨機応変に対応できる点が人間が操作することの利点だ。
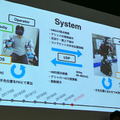
以前のタイプはロボットには360度カメラをつけ、オペレータにはHMDを使って提示していた。これによってオペレーターに対する不快感を低下させることができる。一番の技術ポイントは必要な部分だけを切り出して圧縮して送信することで、低遅延で画像を送信するところ。またパブリックなインターネット経由でも低遅延でのロボット操作ができるようにしている。
■ 動画
現在、等身大サイズのプロトタイプ6を開発中。アメリカ本社オフィスからの遠隔操作にも成功している。手指の開発にも注力しており、小さなものでも操作できる。いまは視差ありの立体画像を提示できるようになり、またロボット指につけた圧力センサで圧力を検知できるようにした。そのほか腰に直動軸を追加して移動領域を拡大、さらに腕の動きとトルクだけではできない作業を実現できるようにしている。
■ 動画
現在、JAXAと共同研究開発中で、ISSの日本モジュール「きぼう」の模擬モジュールでの実験作業をやってみたところ、当日提示されたばかりのタスクでもほぼクリアできた。当日提示された18個のタスク中、13個ができたとのこと。特にグリッパを使うことで多くの作業ができたという。これによって多くの単純作業を地上からの遠隔操作で代替できる可能性を示した。
■ 動画
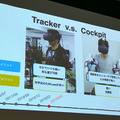
グリッパに対してもモーターを使った振動などによる力覚提示システムを投入している。VRセンサーだけで操作に課題があったので今はコックピットシステムを導入している。光学式トラッカーでは値が急に飛んでしまうといったデメリットがあったが、各関節の値をエンコーダーでとることで制度が高くなったという。また従来は手先位置を純運動学で算出してロボットにマップしていたが、現在は手先位置を見て逆運動学を解いてロボットを動かしている。ただしコックピットには重たいという欠点はあるという。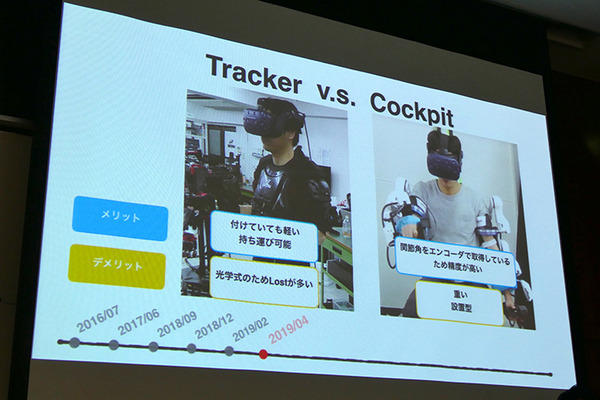
オペレータUIも改善している。重要な情報を提示するためにARを使っており、ロボットの動きを第三者視点で見たり、手元の操作などをアシストすることができる。カメラもアップデートされている。以前はロボット側に360度カメラを使っていたが、作業するときは前しか見ないので、高解像度の魚眼カメラに変えた。高解像度化によって圧倒的に作業がしやすくなったという。主に操作を担当する柴田氏はだいぶ筋肉がついたそうだ。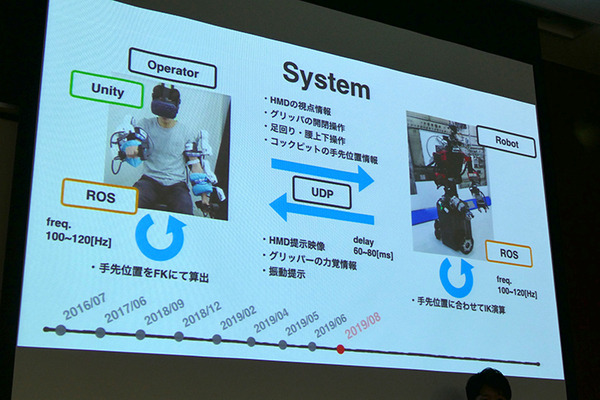
現在は社内に模擬宇宙ステーションを作って、高速で研究開発ループを回している。一個一個のタスクを早く正確にやることに注力しているという。道具を両手で持ち替えたりすることも簡単にできるようになっており、週に二回は必ず実験を行い、アップデートを反映して良し悪しを判断している。作業はまず人間がやってみて、どうやるべきかをオペレータに伝えて、ロボットを動かしているという。また上半身の腕のトルクも向上しており、従来はできなかった作業の多くができるようになった。以前JAXAでできなかった作業も全部できるようになっている。まだ人間の三倍から五倍くらいの作業時間はかかるが、今後も速度アップを目指す。
■ 動画
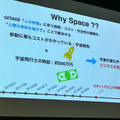
今後は「ANA AVATAR XPRIZE」にチャレンジする。柴田氏は最後に、GITAIは人の移動のためのコストや安全性の課題を「人間の身体を増やす」ことで解決しようとしていると述べ、この考えのもと、もっと移動にコストがかかっているのは宇宙飛行士だろうということで、宇宙がターゲットとなったと語った。同様に人を移動させるコストが高いところには作業代替のニーズがあると考えているという。
なお実際に宇宙ステーションで使うロボットの場合は、今は車輪の下半身部分を腕のようなかたちにしてハンドルを掴むなどして機体を安定させるという。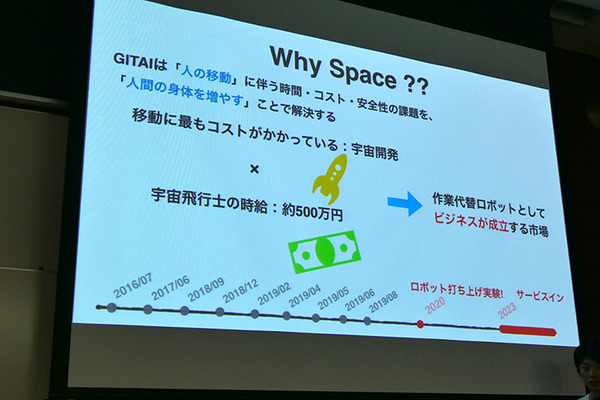
安価高性能な義足提供を目指すBionicM

BionicM株式会社 CEOの孫小軍氏はロボット義足の開発について紹介した。孫氏は自らも義足ユーザーで、9歳のときに病気で右足を切断したが義足は高価なためなかなかつけられなかったが、24歳で初めて義足をつけて、雨のなかで傘をさしたり食堂でトレイを持てるようになったことで感激したと語った。一度は社会人になって義足製品化のチャンスを探ったが必ず、再び東京大学の博士課程に入り、3年間研究を行い、2018年12がtに起業した。いまはどうやったら義足ビジネスに成功して多くのユーザーに安価で良い義足を届けられるか研究開発中だという。
義足市場の99%は動力を持たない受動式義足。膝1軸だけで1000万円するなど非常に高価だが、電動義足の世界はトップ3社が寡占しており、あまり競争が起きていない。またバッテリーが切れるとまったく使えなくなってしまうといった諸課題がある。孫氏はJSTやNEDOのプロジェクトで、バネなどの弾性要素を活用したり、電気的にエネルギーを回生することでバッテリーの低下を遅らせ、動作をサポートする義足を開発中だという。
ロボット自体が家庭内世界を電子化 PFNの全自動お片付けロボットを支える技術

最後に株式会社Preferred Networksの羽鳥潤氏が講演し、2018年のCEATECで紹介されたお片付けロボットの技術を改めて紹介した。Preferred Networks(PFN)は深層学習を核とした頭脳集団として知られているが、最近はロボットの事業に力を入れている。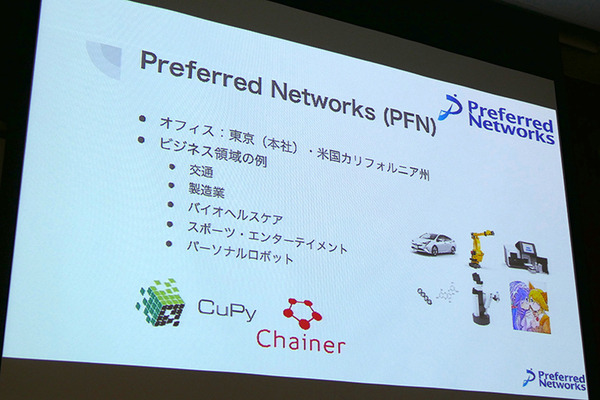
2018年10月のCEATECでは「全自動お片付けロボット」というデモを紹介。パーソナルロボット事業への参入も合わせて発表した。ミッションは「Robots for Everyone」。様々なタスクをこなし、社会のあらゆる場所で活躍する、パーソナルコンピュータのような汎用性・使い勝手、市場の広がりを持ったロボットを実現するのが狙いだ。ロボットが社会の様々な場面に進出する未来を創造しようとしている。
■ 動画
PFNでは様々な環境に適応にするために深層学習技術を活用しようとしている。数千、数万種類の物体、世の中のありとあらゆるものを認識できる技術は、まだ存在しない。様々なものや人を認識するためには様々な環境に一般化できる技術が必要だ。また直感的なヒューマン・ロボット・インタラクション技術もいる。たとえば話し言葉の理解やジェスチャーの理解が必要になる。
「全自動お片付けロボット」ではデモを超えて様々なシーンを認識させるために1000を超える物体を実際に買ってきて、家具も様々なものを設置し、照明条件もあえて様々に変化させたもので教師データを作り、ロバストな認識ができるようにした。具体的にはPFN内製の「PFDet」というモデルを使って、ロボット本体のカメラと補助的に天井に設置されたRGBカメラ4台を活用し、512台のGPUで分散訓練を行った。これによって300種類くらいの物体が認識できるようになった。ニューラルネットワークと最新のモデルを使うことで安定したデモを行うことができたという。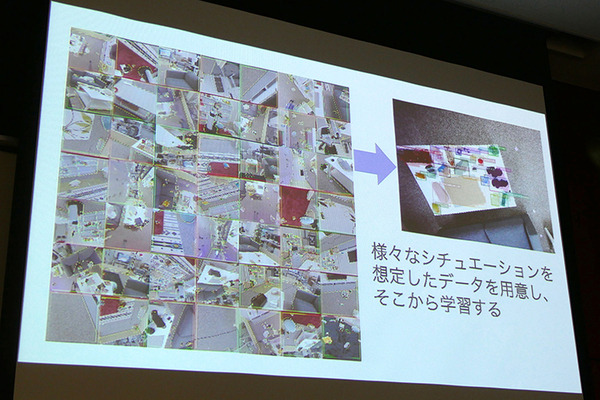
またPFNのお片付けロボットシステムは、自然言語を使って、実世界の物体の検索も可能だ。羽鳥氏は、家庭内のロボットの面白さは実世界の物体が電子化されるところにあると述べた。ロボットがどこに何があるかをインデックス化するために、なくしものがなくなったり、ロボットがそれを取ってきてくれるということだけでなく、ロボット自体が家庭内世界を電子化することで外部サービスとも連携しやすくなる。ここが面白い可能性だ。また、言葉の指示だけではなくスマホやタブレットからモニターすることもできる。
今後の課題としては、外部のセンサーや計算資源を使わない処理、あらゆる物体の認識が可能な技術、様々な環境への一般化、簡単にセットアップできる仕組み、そして安全性を挙げた。そして部屋の片付けのようなシンプルなタスクであれば動くようになっていると述べた。
■ 動画
日本ロボット学会