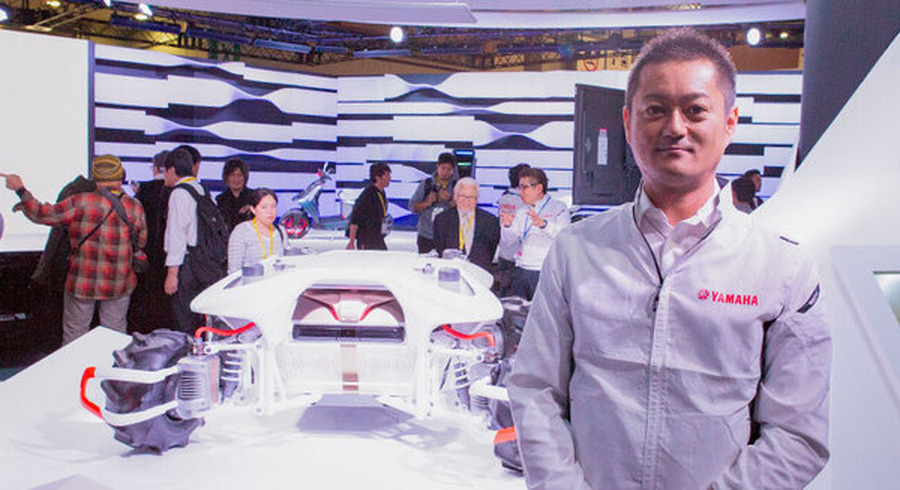








東京モーターショー2019のヤマハ発動機のブースでは「Land Link Concept(ランド リンク コンセプト)」というEVモビリティを特別出展している。インホイールモーター式の4WD(四輪駆動)で4WS(四輪操舵)、自律移動できるUGV(無人走行車)だ。
自律車両開発グループ グループリーダーの西村氏に骨太のインタビューを行った。西村氏は前回の東京モーターショーでは、人間用のオートバイを操縦するロボット「モトボット」の開発リーダーを務めていた人。
(※冒頭の写真 ヤマハ発動機株式会社 先進技術本部 研究開発統括部 先進技術研究部 自律車両開発グループ グループリーダー 西村啓二氏)
ランド リンク コンセプトとは
今回、お披露目された「ランド リンク コンセプト」は、周囲をセンシングしながら自在に移動する自律ソリューションビークル。開発コンセプトは「呼応し合う・LINK」。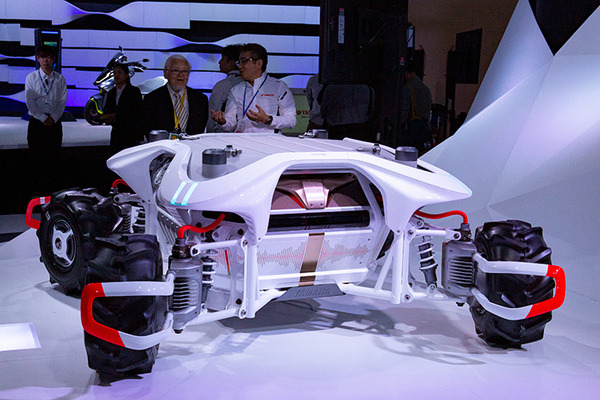
AI画像認識により自ら走路を判断して走行する。障害物を自動で検知し、自ら避けて走行する。しかし、自動運転車の多くが採用しているLiDARを使用せず、カメラ映像(ビジョン)のみで識別・判断する。
四輪がそれぞれ操舵・駆動できるため、方向を問わず移動でき、極端に言えばその場所でクルクルと回ることもできる。人とともに作業する協働性を重視し、高い機動力を備え、器用さも持ち合わせているとしている。
自動走行や足回りの機構について教えてください
では早速、「ランド リンク コンセプト」について、西村氏と骨太の会話を中心にレポート(骨太の話なので自動車関連の専門用語はそのまま掲載しています)。
編集部
「ランド リンク コンセプト」の自律走行やマッピングについて技術的なことを教えてください
西村氏
「ランド リンク コンセプト」では環境センシングはカメラで行うことを目標に、LiDARを使わず、四方のカメラで障害物検知等を行いながら走行します。SLAMではなく、セグメンテーションやオブジェクト・ディテクションと言った、一般のビジョン技術をベースにしています。
マッピングに関しては、いくつか手法は議論していますが、まだ検討している段階で決定はしていません。第一段階として教師画像をもとにアノテーションを行って、推論を回す方法から検討を行っています。
自律走行関連の技術としては、一般の自動運転技術のアプローチとは少し違って、AIの基本的な画像認識技術の方から試していっているという印象を受ける。次に走行性能に関する操舵系、駆動系について聞いてみよう。
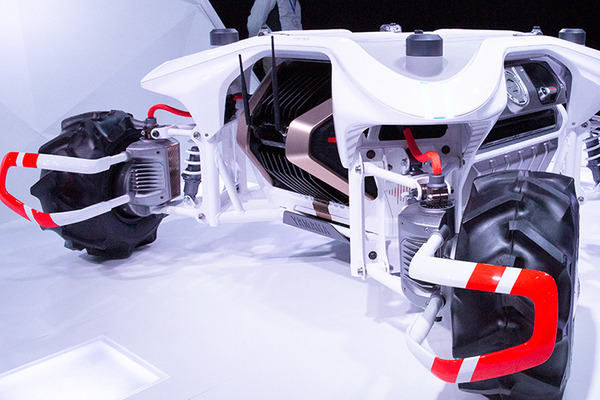
「ランド リンク コンセプト」は4WDと4WS機構を採用しているが、マシンを見ると実はシンプルな話、各タイヤの部分にモーターを装着して、それぞれの車輪を別々に駆動させる手法をとりいれている。
編集部
作業用ビークルという位置づけですが、機構上でチャレンジしている部分を教えてください
西村氏
知能化エンジンと駆動系をリンクさせている点が特徴です。
足回りの特徴としてはインホイールモーターを採用し、4輪別々に制御しています。操舵用(ステア)と駆動用(ドライブ)のモーターを装備していますが、操舵の際は赤いケーブルの延長部分を軸にモーター自身を回すような構造で、駆動はホイール内の位置にモーターが装備されていて、ホイールキャップの内側のプレートを回すような方式をとっています。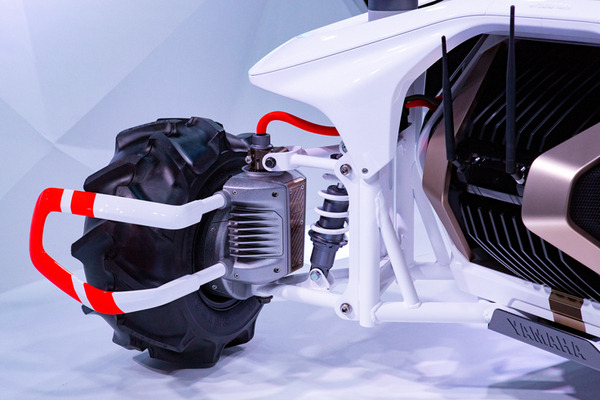
ブレーキはモーター制御のブレーキで、パーキング用のブレーキ機構も装備しています。もちろん、まだプロトタイプなので今後、この機構を変更していくことは十分に考えられます。
インホイールモーター方式を採用した理由
編集部
この機構を採用した理由はどのようなことを重視したからなのでしょうか
西村氏
この機構によってドライブ面ではトラクション性で有利だと考えています。また、なによりモーター類を車輪側に集中させることで、ボディ本体側のデザインの自由度を高められるという点を重視しています。展示しているこの車両は正方形に近いボディデザインですが、用途によっては横幅が狭いものやディメンジョン(長さ・幅・高さ等)が大きく異なるものが望まれるケースもあります。従来のドライブシャフト式等ですと機構上の制約によってボディのデザインや寸法に制限が出てしまいますが、この機構だとボディ側は自由にデザインが可能です。
普通乗用車等の場合、操舵や駆動系はホイールベースやトレッドと密接にかかわってくるため、それに合わせてボディ寸法やデザインがおのずと制約を受けることになる。しかし、このようにタイヤ側にほぼすべての操舵・駆動機構が配置されていると、ボディ側はどんな形状でも比較的自由にデザインできるというわけだ。
西村氏
ブラケットごと四輪をはずし、別のボディに取り付けたとしても、電源ユニットさえつないであげれば、すぐに使える、そんな利便性を意識したものになっています。ボディのサイズはいかようにも変更可能ということは作業車としては重要な要素だと考えています。
とても重要なメリットだと感じた。一方でレースカーやラリーカーなどでは、足回りからタイヤ側は「バネ下重量」と呼ばれ、走行・操縦性能から見ればできるだけ軽くする方向にブラッシュアップしていくのが定石だ。また、駆動と操舵モーターがタイヤ側にあるということは、地面からの衝撃を強く受ける構造だということ。ダンパー(ショックアブソーバー)やスプリングはモーターよりもボディ側に配置されているためだ。この点は課題にはならないのだろうか?
西村氏
おっしゃるとおりです。乗用車など人が乗る乗り物の場合、乗り心地や操縦性が重要で「バネ下重量」を軽くした方が操縦性がよいという考えも重要だと思います。しかし、実際には諸説ありますが、「ランド リンク コンセプト」の場合は人が乗らない作業車であり、ボディ側に重たいものを載せることも考えると、モーターやバッテリー等の重量物の配分はできるだけ下にある方が安定するという考えもあります。重心を低くできるというメリットにおいてはこの方式は優れていると考えています。
あと、バネ下にモーターを置いていることについては、衝撃などの条件はご指摘の通り厳しくなります。信頼性や耐久面では十分に検証していく必要があります。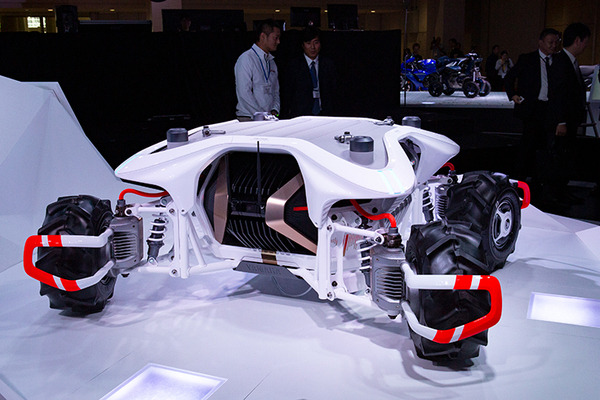
西村氏
遠隔操縦の場合、タブレット端末等で人間が操作することはできます。ただ、メインは自律走行ですので、ユーザーがスタート地点からゴールを指示をすることで、カメラで障害物を避けながら走路を判断して自律的に走行していくということになります。
前回のモトボットとは全く違ったカテゴリーではあるものの、新しい技術で新しい市場を切り拓く挑戦をヤマハ発動機ははじめている。それはまだ始まったばかりで試行錯誤しているところだ、ということは西村氏の話からも伝わってきた。
今後、このプロジェクトがどのように進化していくのか、とても楽しみだ。






