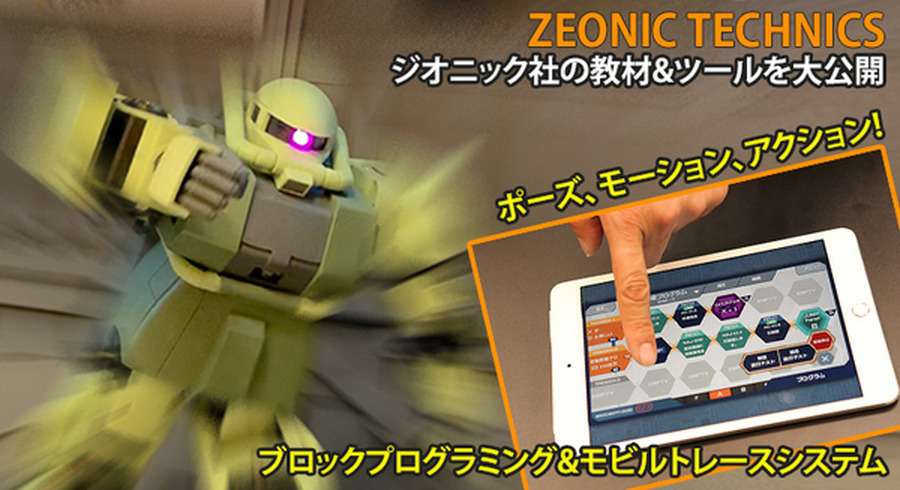






バンダイの新規事業室が、ガンダムの世界観の中で、ロボット工学とプログラミングを学習しながらモビルスーツの開発が体験できる「ZEONIC TECHNICS」(ジオニックテクニクス)。本当の名称は「ZEONIC TECHNICS Robotics and Programming Course I」と、かなり長いが、つまりはロボティクス&プログラミング研修コース その1と銘打たれている。
「ZEONIC TECHNICS」のミニチュアザクがどのように動くのか、起き上がる様子とバトルアクションがこの動画!
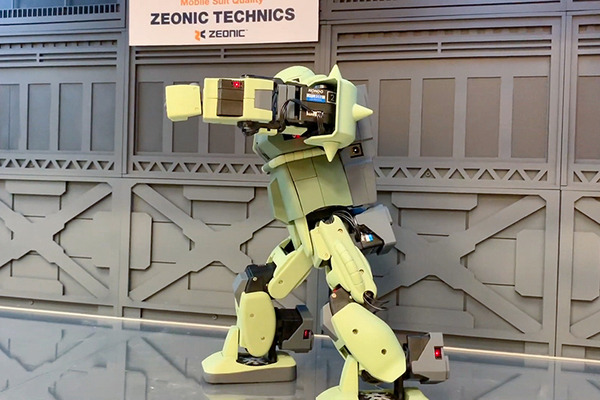
■ ミニチュアザク、大地に立つ!! Stand Up and Battle Action
では、どうやってモビルスーツ開発が体験できるのか。
開発中の「ZEONIC TECHNICS」を見せてもらった。
ジオニック研修生として組み立てて学び、教本から学ぶ
まずはモビルスーツのハードウェア面。ロボットの構造を理解するには実際に組み立ててみることが一番だ。フレームやサーボモーター、センサー、LED、バッテリー等、組み立てながらミニチュアザクの基本的なしくみが理解できる。
ロボット工学の基礎が本格的に学べる教本
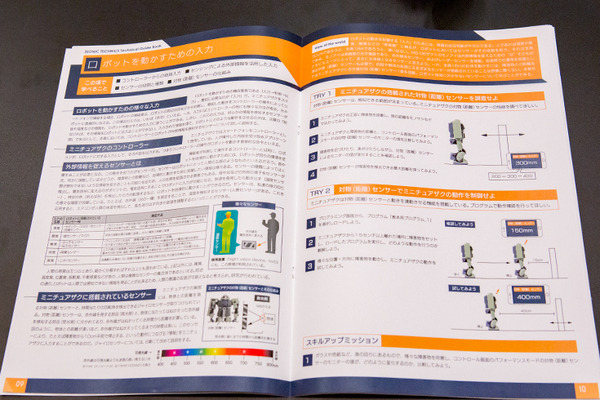
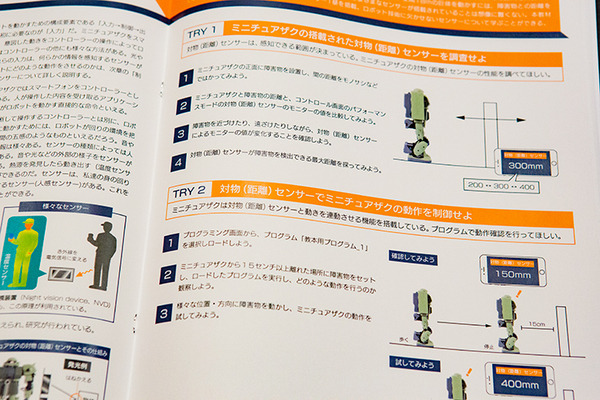
さらに添付の教本(マニュアル)には、実際のロボット工学における各部の理論が解説されている。組み立てながらサーボモーターの構造やセンサーの役割、用語解説など、ロボティクスやセンシング技術が理解できるのだ。内容を詳しく見てさらに驚く。センサーのしくみ、三角関数を使った測距や大きさ推定などがていねいに解説されている。
更には、ガンダムの世界観の中で語られる架空の技術から理論的には実在しているものの実現していないシステムなどの解説も、宇宙世紀の知識として掲載されているから、ファンにはたまらない構成になっている。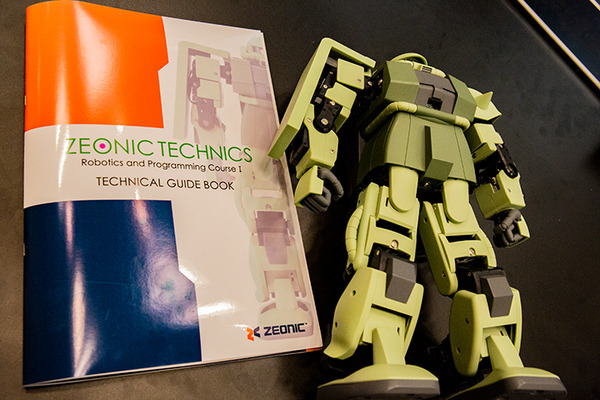
ZEONIC TECHNICSアプリでトレーニング
もちろん教本に書かれていることを机上で学習するだけではない。ここで学んだことをスマホやタブレットのアプリを使って実践してこそジオニック社のトレーニングコースだ。アプリを起動すると壮大なオープニングサウンドが流れた後、ホーム画面が表示される。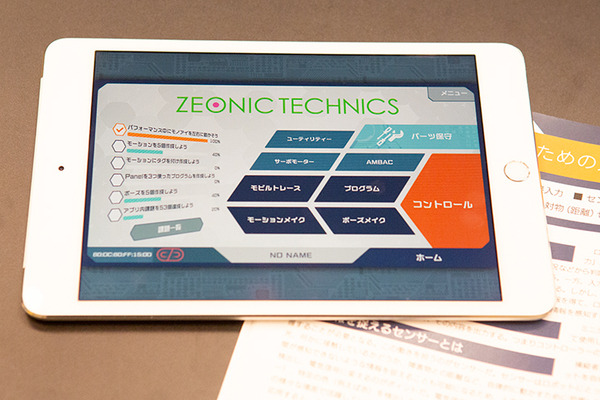
画面の左には複数の課題が表示され、自分がどこまで学習し、どれだけ達成したかがわかるようになっている。ジオニック社のトレーニングは課題達成度によってポイント(報酬)が与えられ、高いモチベーションを保って研修にのぞめるしくみが導入されていることがわかる。一般にはシミュレータやeラーニング等で実際に取り入れられている手法だ。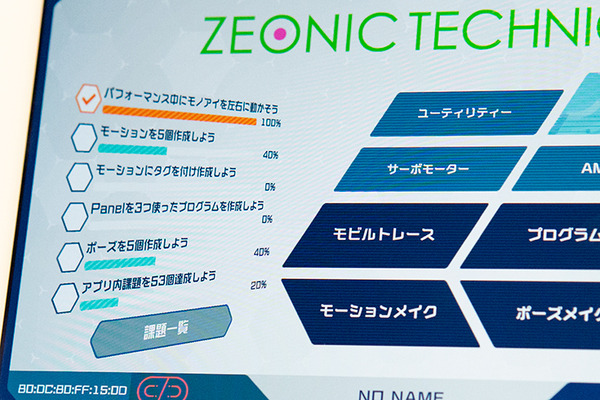
ちなみに英語版の開発にも既に着手。ユーティリティで英語モードへの変更も体験できたことを報告しておきたい。
では、いよいよミニチュアザクを動かしてみよう。しかし、現実には二足歩行ロボットは立ち上がったり、まっすぐ歩かせるだけでも難しい。その難しさを体験することも開発者としては必要な試練だ。
ザクを動かす
組み上げたミニチュアザクはスマートフォンのアプリでラジコンのように操縦することができる。その機能が「リモートコントロール」だ。まずはモノアイを動かしてその醍醐味を味わおう。
「ZEONIC TECHNICS」では予めいくつかのアクションがプリセットで用意されている。モノアイを動作させることもそのひとつだ。
モビルトレースシステム
また、ユニークな「モビルトレースシステム」も用意されているので併せて使ってみたい。俗に「マスタースレーブ方式」とも呼ばれる操縦方法で、「ZEONIC TECHNICS」ではザクの腕など、上半身を操作するのに使われる。操縦デバイスと同じようにロボットの腕が動作するしくみだ。
すなわち、スマホを振り上げると同様にザクが手を振り上げ、スマホを振り下ろすとザクも手を振り下ろす、といったユーザーによる制御設定が可能だ。スマホに搭載されているジャイロセンサーの数値を読み取って、傾きに合わせてザクのサーボモーターが動作するハイテク制御のしくみが取り入れられ、実現されている。
ブロックプログラミング
次にいよいよ、ザクが立ち上がったり、歩いたりするところが見たくなる。しかし、前述したとおり、二足歩行ロボットの場合は特に、自分で操作して操縦するのは「起き上がったり」「歩く」だけでも難しいものだ。
そこで使いたいのが「ブロックプログラミング」だ。「どのくらいの速度で歩く」「どのくらいの角度で向きを変える」など、ロボットが比較的安全に動作するアクションがあらかじめ用意されているので、それを組み合わせてロボットの動きを制御する方法だ。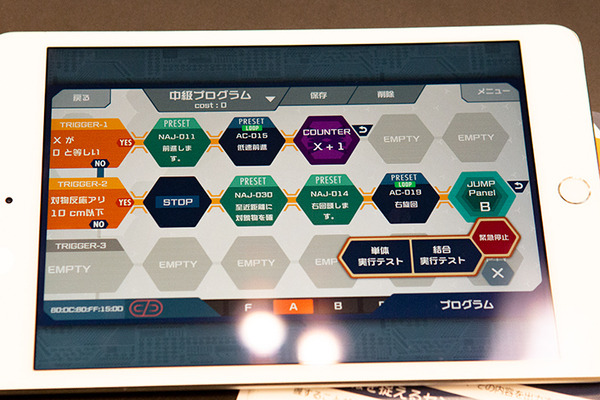
2020年のプログラミング教育必修化でも取り入れられるプログラミングの基本は、順次処理、繰り返し、条件分岐だ。ここから学び始めることで、ロボット制御のしくみを理解しつつ、ステップアップを繰り返しながら順序立てて理解していくことができるだろう。
■歩行、センサーで壁を検知したら回頭、プログラミング
ポーズメイクとモーションメイク
ロボティクスの基礎を学んだら、次に「ポーズメイク」を実践してみよう。ポーズメイクはその名の通り、ミニチュアザクに好きなポーズをとらせて登録すること。実践ではダイレクトティーチングと呼ばれている手法に近い。好きなポーズをとらせて「スキャン」すると、サーボーモータ等の情報を参照してそのポーズを記憶する(例:ポーズ1)。
ポーズを登録したら、次はモーションを作って登録しよう。これが「モーションメイク」だ。例えば、登録したポーズ1になるようにモーションをセットすると、ミニチュアザクがその時どんなポーズであったとしても、登録したポーズ1になるように自動的に動作が作成される機能、まるでリアルなモーフィングだ。これは高度な姿勢制御技術を応用したものだ。
複数のポーズを登録したら、ポーズ1からポーズ2へと移行するモーションを作って登録するのも面白いだろう。移行する速度やサウンドも設定することができる。
モーションをエキスポート
上級者が専用PCソフトで作ったモーションをほかの人と共有することができる。モーションをテキストデータに変換してエキスポートする機能があるのだ。テキストなので生成されたモーションはメールやSNSで簡単に送ることができ、受け取ったユーザーはそれをインポートすればほかの人が開発したモーションを自分のミニチュアザクで再現することができる。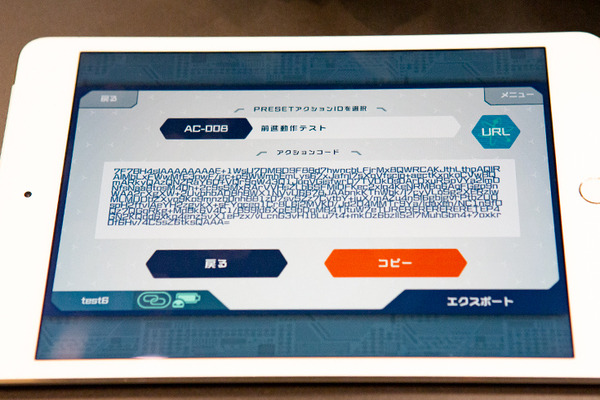
将来的にはモーションのやりとりを中心にしたコミュニティが作られる可能性もある。
宇宙空間で活躍する日を夢見て
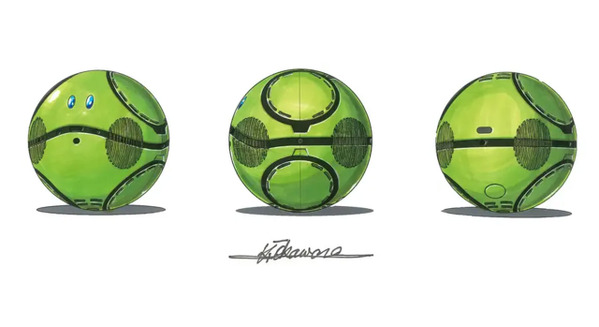
なお、宇宙などの無重力・低重力空間における姿勢制御に重要な「AMBAC」(アンパック:Active Mass Balance Auto Control)の基本が学べるしくみも導入されている。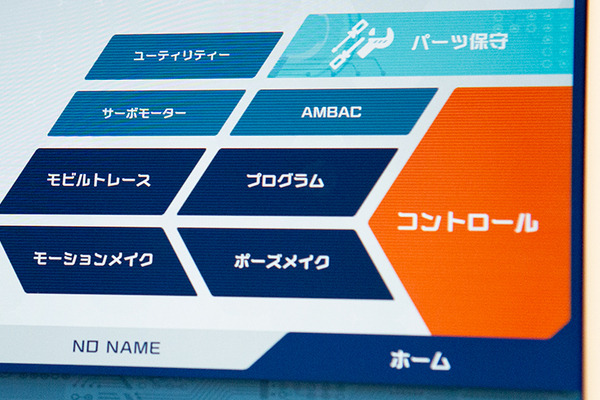
もちろん、残念ながらAMBACを無重力の環境で試すことはできないが、原理は学ぶことができるだろう。
ガンダムの世界観に浸りながら、いつか宇宙空間でこの知識を活用できる日を夢見ながら、ロボティクスを学ぶのも楽しいだろう。

(c)創通・サンライズ