国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)によるシンポジウム「NEDO AI&ROBOT NEXTシンポジウム ~人を見守る人工知能、人と協働するロボットの実現に向けて~」が1月16日(木)と17日(金)に東京・新宿で行われた。「次世代人工知能・ロボット中核技術開発」および「人工知能技術適用によるスマート社会の実現」のプロジェクトの成果を紹介するイベントで、会場ではロボット展示も行われた。
この記事では、大阪大学大学院 基礎工学研究科 システム創成専攻の原田研介教授らが発表した、製造現場でのロボットの自律的な作業を支援するAI技術とロボットの発表と、ロボット・スタートアップの発表についてご紹介しておきたい。
バラ積み・組み立てに柔軟に対応できるロボット

現状のロボットの主な使われ方は単一の工程を担うことだ。しかし、変種変量生産など、複雑な作業への対応ニーズは年々高まっている。また、ティーチングコストを下げることも以前からニーズが高い。
原田氏らは部品供給作業と製品組立の自動化を目指した手法を開発した。部品の供給はものづくり現場において起点となる重要な課題だ。しかし今もまだ完全自動化に至っておらず、部品ピッキングは大きな課題となっている。乱雑な状態で積まれた部品(バラ積み部品)を持ち上げて所定の場所に置く作業が、現在の技術では、まだ難しいのだ。
従来はモデルベースの手法が用いられていることが多いが、これにはあらかじめピッキングする部品のモデルが必要だという課題がある。また昨今注目されている学習ベースの手法には、学習に大きな手間と時間がかかる課題がある。また、どのようなハンドを用いたらいいか、その選択もコストとなっている。そこで研究グループでは複雑な形状の対象物に対応できるハンド選択機能を持った学習型バラ積みピッキング手法の解決を目指した。
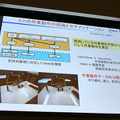
プロジェクトではまず、バラ積み用の物理シミュレーターを開発した。バラ積みされた状態で供給される部品の状態を再現し、トライ・アンド・エラーを計算機のなかで繰り返すことで、深層学習を計算機のなかだけで完結させられるシミュレーターだ。学習用のデータ1万枚の生成時間を50時間から16時間に短縮する手法を開発し、グリッパーを使ったピッキングの成功/失敗を判定することもできる。シミュレーターを使った、およそ6時間程度の学習だけで、実際のロボットを使ったピッキングも可能になった。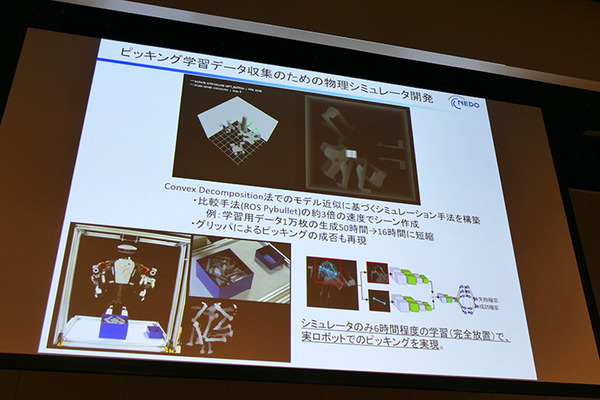
■ 動画
また、従来の特徴量ベースの手法と深層学習を使った手法とを最終的に組み合わせることを目指した。複雑な形をした部品がバラ積みされていると、部品同士が絡んでしまって、2個取りや三個取りになってしまう。それをニューラルネットワークを使って予測することで、把持するべき候補点の中から、どれが絡みが生じて、どれが絡まないかを予測して最終的に把持する点を決定するアルゴリズムを開発した。グリッパーの姿勢をテンプレートとすることで、把持位置の検出の高速化も行った。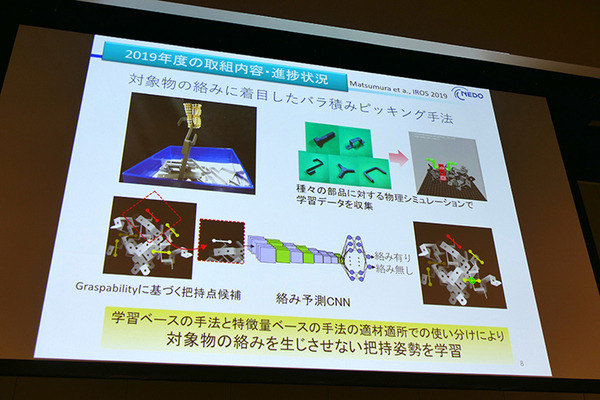
そして「World Robot Summit(WRS)」を腕試しの場所として、阪大+産総研+オムロン+Sensetime Japanチームとして出場し、一昨年、バラ積みキッティングに挑戦した。結果は16チーム中4位だった。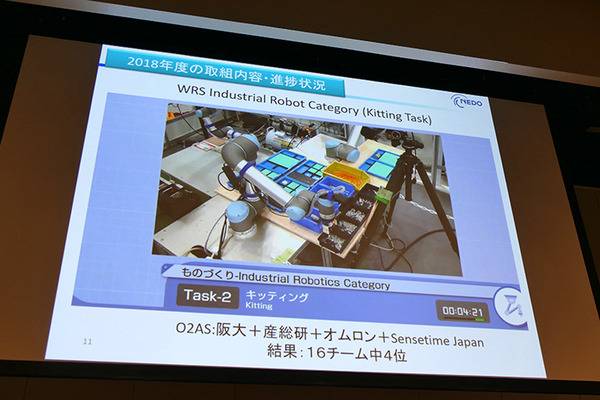
また、作業動作自動生成システムの研究開発にも取り組んだ。ロボットが作業動作を自動で作ることができるようになれば、より柔軟に新しい作業に対応することができる。プロジェクト開始当初、原田氏は「人が新しい作業をするときにはどのようにするのか」と考えたという。人は過去に実行した作業を呼び起こして、それをベースに作業をするのではないかと仮定し、ロボットが組み立て作業を適応的に行うためには同様に、過去作業のデータベースを作っていって、そこから呼び出しながら作業をするのがいいのではないかと考えた。そこで、ロボット作業のデータ収集、蓄積、再利用、検索などが実現できるプラットフォームを構想した。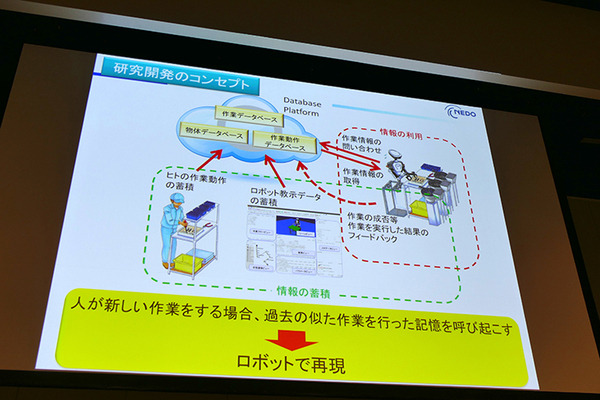
組立作業を計画するためには、ロボットの把持姿勢や配置、持ち替え姿勢などのデータが大量に必要になる。残念ながら今回のプロジェクトでは、そこまではできなかったとのことだが、今後も同様の構想をもとに研究を進めていくという。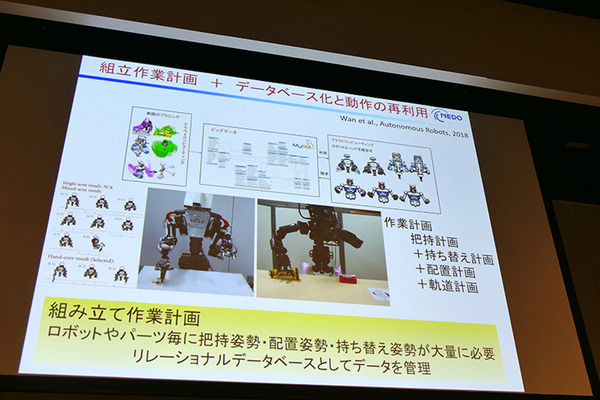
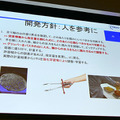
具体的には、動作キャプチャーを使った人の作業動作の認識とセグメンテーションなどを進めた。いま人が何をつかんでいるかを認識・推測することができれば、その道具から探索空間を狭めることができる。たとえばハンマーであれば、叩くといった動作をしている可能性が高い。持っているものを手掛かりにして作業の動作識別をすることができる。そういった作業データの蓄積と認識を進めているという。また、現状の視覚センサの粒度は粗い。それを精密作業に適したデータに作り直すといった仕組みも構築しようとしているという。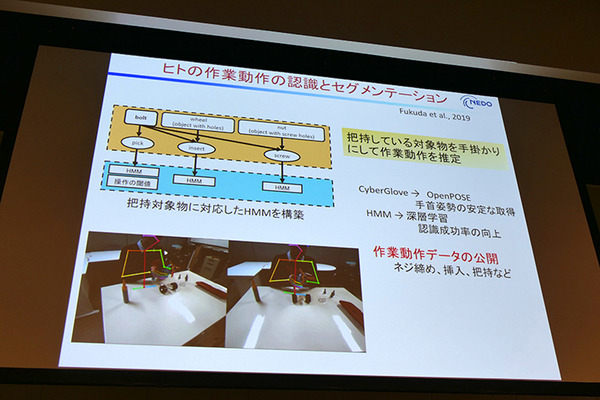
■ 動画
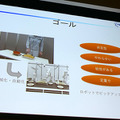
このほか、モノの機能を自動認識し、どの部分が持つべき場所なのか、どこの部分がどの向きだと機能を発揮できるのか、道具の使い方を認識させられる仕組みも作ることを目指す。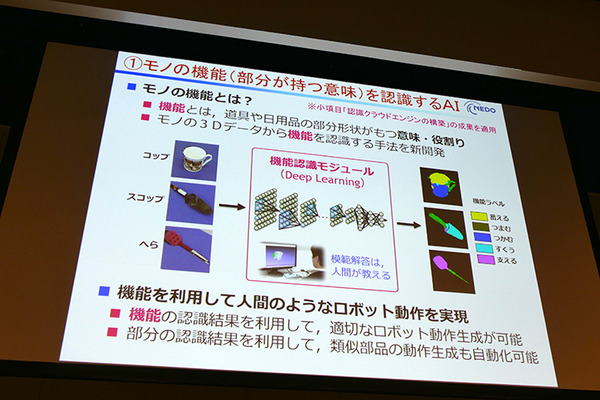
今回のシンポジウム会場では、中京大学 橋本研究室と金沢大学 辻研究室が中心となった、ロボットを使ってお茶を点てるデモンストレーションを行っていた。
最終的には、開発した各技術全体を統合し、より自在かつ柔軟に、多様な作業に対応できるロボットシステムの構築を目指したいとのことだった。
■ 動画
パスタ盛り付けロボや、物流プラットフォームなどスタートアップの発表も

このほか、スタートアップからのライトニングトークも行われた。株式会社DeepXの代表取締役CEO 那須野薫氏は、パスタのような柔軟物を盛り付けるロボット&AI技術の開発状況の進捗を報告した。現在、弁当のパスタなどは人手で盛り付けが行われている。パスタは茹でたて後から、状態が刻一刻と変わる。また、実際に掴んでみないと実際の密度や粘度が分からない、コストやサイズといった難しさがある。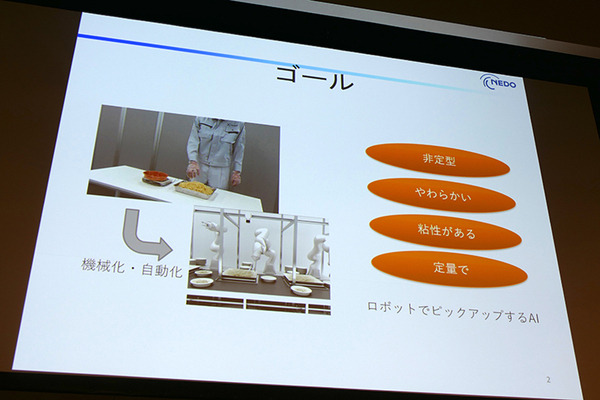
DeepXでは、人の作業を置き換えることを目指し、業務用計量機器メーカーの株式会社イシダと組んで、強化学習などを活用した自動化を試みている。現在の状況は製品リリースのための最終調整を開始している段階だという。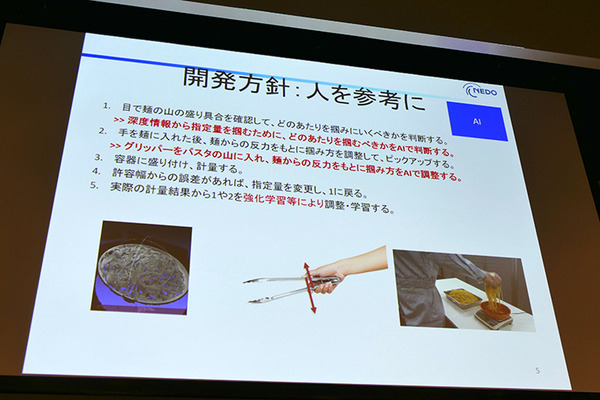
前述のようにパスタは粘性が強い。たとえば、フォークで刺した場合も、刺していないパスタが絡みついて一緒に持ち上がってくる。これが重量誤差となる。そこでロボットアームを振るなどして掴んでいないパスタを振り落とすことで重量誤差を減らす。また、茹でたあとに温度が変わるために掴み方を刻一刻変えないといけない点も対応に工夫が必要だったという。つかんだときの反力情報から掴み方を再調整する機能も独自に開発した。
今後は2020年内に販売開始を目指している。また、パスタ以外の食品への展開も考えたいと語った。
Rapyuta Robotics株式会社の代表取締役CEO Gajamohan Mohanarajah(ガジャン・モーハナラージャー)氏は、ロボット導入率を高めるには「様々な種類位のロボットが合わさって、環境の変化やタスクの変化に対応しないとロボットは広がらない」と述べ、柔軟性と多様性を持つプラットフォームを作っているのが我々だと述べて、ロボットを管理するインフラと群制御AIを提供していると紹介した。
Rapyuta RoboticsはAMRと呼ばれるタイプの物流倉庫内でのピッキング補助ロボットの開発を行っている。実証実験では物流倉庫内を人が歩く距離がおおよそ半分に減り、捌けるオーダー量も6割くらい上がったという。人が4月から本格導入予定で開発を進めていると述べた。また、自動フォークリフトの製品開発も目指していると語り「ハチの巣のように柔軟でスケールするシステムを考えている。複数ロボットを使ったソリューションを考えている人はぜひ声をかけてください」と述べた。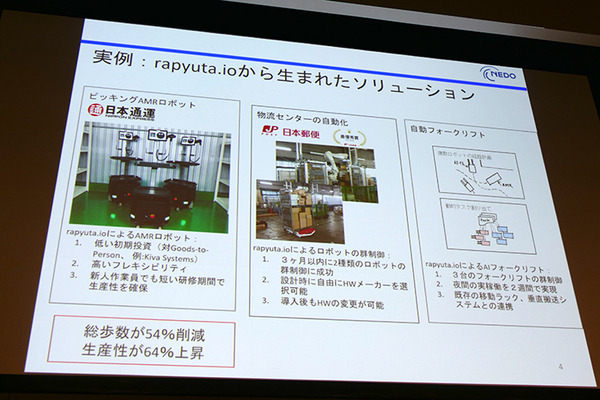
NEDO AI&ROBOT NEXTシンポジウム