

浜松市は地域課題の解決や市民生活の質の向上に資する実証実験プロジェクトを全国のベンチャー企業等から募集し、採択したプロジェクトに対し、市が様々な支援をする、実証実験サポート事業を昨年度から実施している。2020年10月22日、浜松市は昨年度の採択プロジェクトであるPerceptIn Japan 合同会社の「超小型モビリティを用いた自動運転」の実証実験を天竜区水窪町で実施することを発表した。
PerceptIn Japan合同会社はLiDARと高精度3Dマップ(注釈)を使用しない、GPSとコンピュータビジョンとIMU(角度、加速度など複合的に計測するセンサー)の統合による低速走行向けの超低コストな自動運転ソリューションの提供している。実証実験では「スーパーまきうち」、「水窪小(入口)」、「郵便局」に停留所を設置し、「スーパーやまみち」から「水窪橋」までの市街地旧道約2キロの区間を株式会社タジマEVのEV「タジマ・ジャイアン」が走行する(テストドライバーが同乗し、緊急時には車両を操作)。今回実施のLiDARと高精度3Dマップを使用しない、超低コストな自動運転システムを使用した公道走行は今回の実証実験が国内初となる。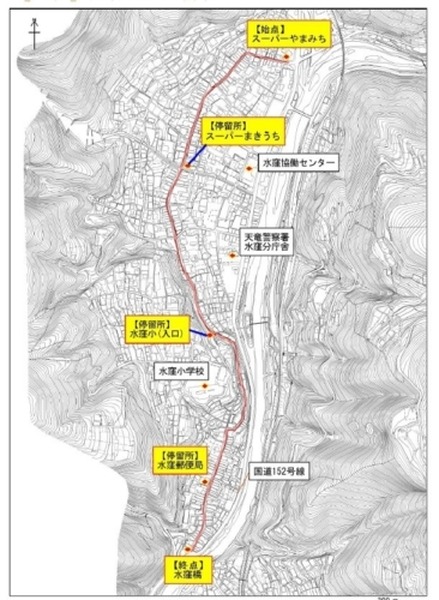
「light detection and ranging」の頭文字をとった言葉。レーザー光を照射し、対象物からの錯乱や反射光を観測することで、対象物までの距離を計測したり対象物の性質を特定したりする、光センサー技術のこと。先行車・歩行者・建物などの距離や形状、位置関係を三次元で把握することが可能であり、自動運転レベル3以上では必須の技術として、各社が研究開発を加速させている。一方、高価格な現状があり、走行車両のコストが高くなることがネックである。
高精度3Dマップ
LiDARを用いた自動運転に必須となる3次元情報を持つ高精度な地図のこと。車線情報や地形、信号、道路規制など、常に最新の情報を反映された高精度地図をなくして自動運転実現は不可能。カメラやスキャナを満載した車両で、実際に道路を走行して測定し、そのデータを加工して作るため、マップの整備、運用にはコストがかかる。
実証実験は11月21日(土)~24日(火)の4日間、9:00~12:00、13:00~15:00の時間帯に行われ、運行は株式会社マクニカが実施する。
浜松市は浜松市の中山間地域におけるラストワンマイル問題の解決手段としての可能性を検討する。PerceptIn Japanは2022年の社会実装(自動運転レベル3相当)に向けたステップとして、将来的に社会実装のリアリティのある水窪地域における公道実証実験を行い、利用者の意見収集、及び運用における課題を明確化する。
■参考動画 タジマ・ジャイアン 超小型モビリティ 西伊豆松崎町での自動運転実証実験
万博記念公園の自動運転車両でバーチャルキャラクター小石川 彩がリアルタイムでガイド!凸版とTIS、XRの遠隔観光案内
西新宿で「5G」自動運転タクシーの実証実験へ ティアフォーやKDDIなど5社協業、タクシー4社も参加 抽選による一般参加枠あり
NVIDIAとメルセデスが描く「自動運転の未来」Omniverse、Isaac、MAXINE、DPU「GTC2020」基調講演を読み解くキーワード
自動運転関連記事
PerceptIn Japan合同会社