


オムロン株式会社は、シミュレーションソフトウェア「Sysmac Studio 3Dシミュレーション」をバージョンアップし、2021年10月4日からグローバルに展開すると発表し、オンラインで記者会見を行った。
「Sysmac Studio 3Dシミュレーション」は2020年にオムロン発売したシミュレータで、ロボットを含む豊富な制御機器群の技術を活用することで工場設備全体をデジタル上で再現し、実機と同等の精度で動作を検証できるシミュレーションソフトウェア。
今回のバージョンアップで、オムロン製のロボットや制御機器だけでなく、顧客が自社開発しているカスタムロボットや、パートナー企業のI/O制御で動作させる電動シリンダ、電動チャックなどの汎用機器(EtherCAT接続対応であることが条件)も含めた設備全体のシミュレーションが可能となった。これにより製造業の生産能力向上と、設備の立ち上げから保全までを短期間で実現することに貢献し、設備立ち上げのための工数を半減する。
実際の制御プログラムとデータを使ってシミュレーションするので再現性が高く、実機にそのまま再利用できる。もともとはオムロンの製品群のシミュレーションに重きを置いていたが、自前以外の部分もシミュレーションできるように対応範囲を広げた。
変化への対応が迫られている生産現場
説明会でオムロンロボット事業推進プロジェクトの大谷氏は、ロボット統合コントローラ開発背景から解説した。製造業のものづくりは、いま3つの大きな変化を迎えているという。ものづくりの高度化、グローバル生産の定着、働く人の変化による新たな自動化といった環境変化、そしてIoTの飛躍的進化、ロボティクス技術の進化、AI技術の進化といった変化への対応が必要となっている。
具体的には商品の多様化やライフサイクル短期化が起き、そのための自動化技術が新たに必要となっている。またグローバルな供給体制と生産拠点化への対応、世界レベルでの労働力不足と人件費高騰への対応も必要だ。
ニーズに応える自動化のための課題もどんどん変化している。品種とライフサイクルの生産切り替え時間の短縮、グローバルでの製品品質・コストの標準化、需要変動への柔軟な対応、設備の再利用かとフットプリント効率化などが必要になっている。
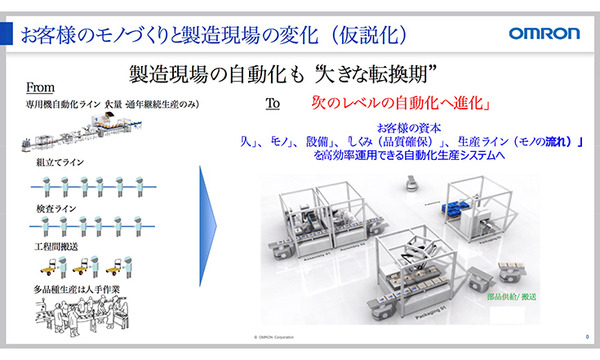
従来の自動化は基本的に大量生産型で、長期で生産するロングセラー製品、年間生産量の多い商品の自動化が中心だった。だが、どんどん短期での変種変量製品への自動化ニーズが高まっている。しかも、そのなかでも収益をあげる自動化を考えないといけなくなっている。製造業の自動化も大きな転換期を迎えている。
業務プロセス全体の「ムダ」「ムリ」「ムラ」を減らす
オムロンでは、いかに業務プロセス全体の「ムダ」「ムリ」「ムラ」を減らすかを価値提供として提案している。従来はまだまだ「点」での改善しか考えられておらず、作業上の待ち時間や設計・製作のミス削減、チョコ停削減のムダ減はまだ可能だ。また現場では特に人に対して負担がかかっており、この「ムリ」を減らすことが重要だ。それは同時にバラツキ削減、「ムラ」減につながる。
オムロンでは「ロボット統合コントローラー」の価値は4つのポイントのスループット(単位時間あたりの処理量)を上げるとして提案している。4つとは、装置、工程設計、生産、業務プロセス(改善サイクル)それぞれのスループットである。
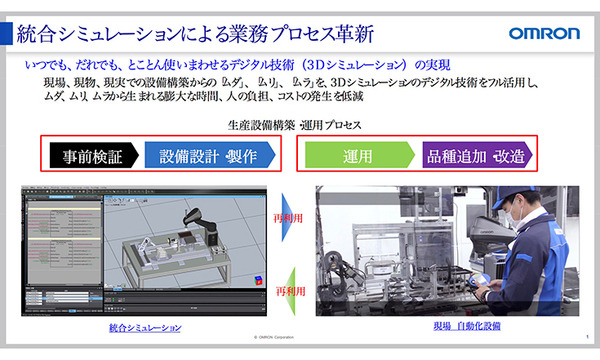
今回のシミュレーションソフトウェアは、そのなかでも「工程設計スループット」の向上への寄与を提案している。要するに、できるだけバーチャルで段取りをすませて、現場現物作業の手間を最小限にしようというものだ。
■動画
EtherCATを活用、再現精度が高いシミュレーションが可能
こだわっているポイントは「いつでもだれでも、とことん使いまわせるデジタル技術の実現」だという。現場での後戻りを減らすため、可能な限り現物を使わなくてもバーチャルな技術を使って事前に問題を潰しこむことを目指す。そしてそこで活用した資産を再利用して現場をすぐに立ち上げられるようにする。
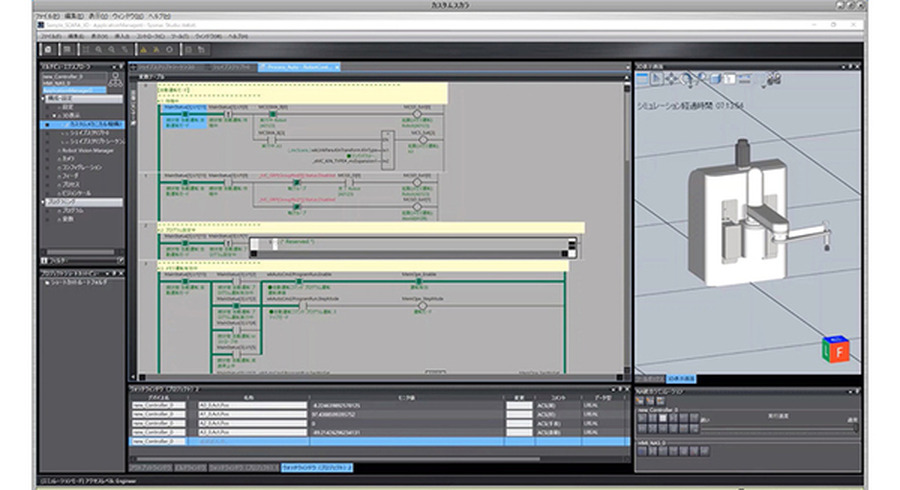
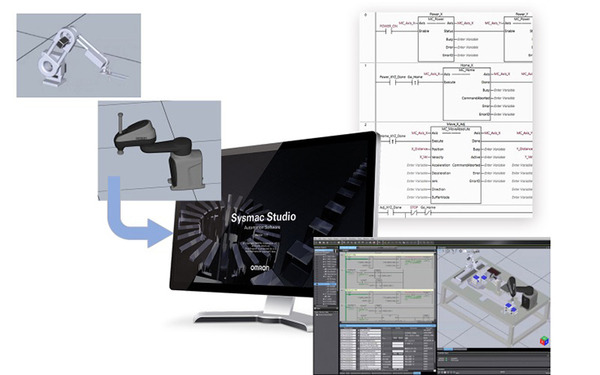
具体的な手順はこうだ。まず「Sysmac Studio」に対象のCADデータを取り込む。次にその要素に対して各動作パラメーターをガイドラインに添いながら設定する。隣接する部品には親子関係を設定すると、一体で動くようになる。それを実際の環境のなかでちゃんと動かせるか確認できるというものだ。
パートナー機器をシミュレーションできることについては、大谷氏はIAI社のエレシリンダーや、オリエンタルモーター社での独自ロボットの動作を例として紹介した。イメージCGではなく、実際に制御している内容そのもので自動化設備の提案が可能になるという。検証内容がOKならば、そのまま実機に実装することで現場での実証がより短期で可能になる。これにより、設備設計や動作検証の時間を50%短縮するという。
また、設備稼働後は、実機の動作状況をデジタル上で確認・モニタリングすることで、異常時の原因解明までの時間を短期化。リモートでのプログラム修正によって改造にかかる時間の短縮にも貢献するとしている。
なお対象パートナーはEtherCATに接続可能な機器をもっているメーカーで、現状60社程度。EtherCATを使うことで時間保証されているデータをもとにしており、従来のCADメーカーのシミュレーターとは異なり、非常に再現精度の高いシミュレータとして活用できるという。



