



一般社団法人日本フルードパワー工業会と産経新聞社主催で、10月6日から3日間の日程で東京ビッグサイトにて第26回フルードパワー国際見本市(IFPEX2021)が開催された。
IFPEX2021では立命館大学 理工学部 ロボティクス学科 教授の玄相昊氏が「フルードパワーはロボットに使えるのか?」と題して講演した。まず、新たに出展された水陸両用の軽量マニピュレータなど玄研究室の展示と合わせてレポートする。
油圧の利点は駆動源と可動部を離せる「離れ技」

環境に働きかける存在であるロボットの要はアクチュエータだ。センサーや計算機は低コストになってきたが、アクチュエータにはまだ課題がある。代表的なものは電動だが、玄氏は油圧、水圧、空圧など「フルードパワー」に着目して研究を行っている。
日本では電動ロボットが多いが、アメリカでは似た形状のものを作っても油圧製アクチュエータを使ったロボットが多い。油圧のほうが、力を出しやすい、丈夫といった特徴があるため、屋外で活躍するロボットについては油圧に軍配が上がると考えられている。ボストンダイナミクスの「Atlas」が代表例だ。
■動画
要となっているのはやはりアクチュエータである。運動制御やシミュレーションの技術もあるが、コンパクトな油圧源がポイントとなっている。ただし、市場性は不透明であり、「単に後追いするだけではダメだ」と玄氏は語った。
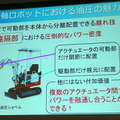
マニピュレータに代表される多軸のロボットにおける油圧の魅力は何か。玄氏は、それは、配管を使って可動部を本体から分離できる、いわば「離れ技」、そして遠隔部における圧倒的なパワー密度だと指摘した。油圧ならば、アクチュエータの可動部だけを関節に配置して、駆動源は根元に配置するといったことができる。また、油圧では複数のアクチュエーター間でパワーを融通し合うことが簡単にできる点も大きな特徴だ。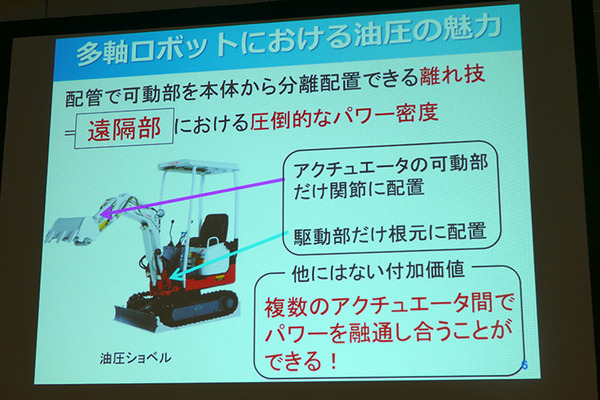
では油圧の現状はどうか。2014年ごろに油圧が再度注目を集めたことがあった。しかしながら復権はしていないというのが現状だ。
柔軟、軽量、頑丈な油圧ロボット
そして玄氏は4つのトピックスを紹介した。まず一つ目は、柔軟、軽量、頑丈が売りの油圧を活かすこと。玄研究室では油圧サーボ弁を使って瞬発性と高速性を追求する研究を行なっている。玄氏は2リンクのロボットを制御する様子や、力制御による仮想バネ制御の様子をビデオで紹介した。100Nmくらいの関節トルクを精密に追従することができるという。
電動ロボットで同じことをやろうと思うとギアを使う必要があるが反応が遅くなってしまう。またギア比を落とす必要があり、そうすると力が出せなくなってしまう。すると、力制御はできても肝心の力があまり出なくなってしまう欠点がある。
この技術を使って玄研究室では人サイズの協働ロボットと、不整地移動ロボットを開発している。力が出せる一方で脱力もできるなど、扱える力のレンジが広く、応答性を早くできるのがうりで、油圧による力制御のポテンシャルを示すための研究開発だ。展示されているロボットは学生たちが3ヶ月くらいで組み上げたものだという。
また不整地での脚式移動ロボットは、現在は建築現場などへの適用を考えているという。油圧による力制御を行うことで、比較的簡単に、凹凸面に吸い付くように動くことができる。また二足歩行ロボットの開発も行なっている。同じく凸凹のある地面にも対応でき、傾斜が急に変わったり段差に乗り上げても足がその変化にならって柔らかく制御することで馴染ませることができる。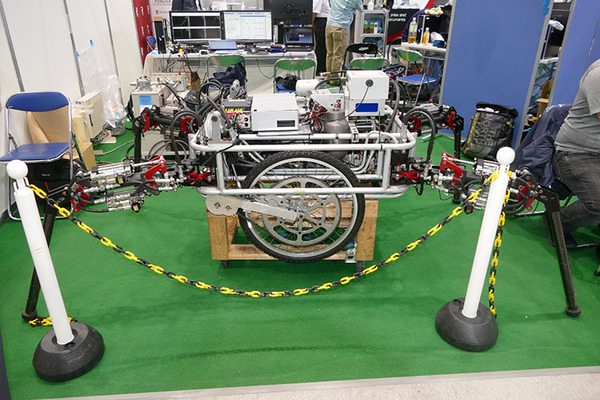
単純にメカを組み上げて行くと重たいものになってしまうが、専門家の知見を集めて最適化していけば軽量化は可能だ。ボストンダイナミクスのAtalsのようなロボットも「頑張ればできなくはない」という。ただし、売れるかどうかは全くの未知数だ。
多軸ロボット向きの油圧回路
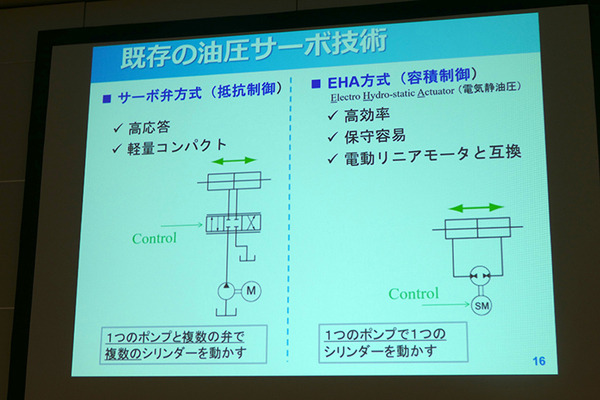
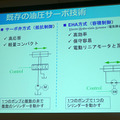
二つ目のトピックは変幻自在な多軸伝達機構を実現するための油圧回路の話。油圧サーボ制御には一つのポンプと複数の弁で複数のシリンダーを動かす「サーボ弁方式」と、一つのポンプで一つのシリンダーを動かす「EHA方式」があるが、それぞれ一長一短ある。玄氏らは両者の利点を組み合わせることで多軸ロボットに適した油圧回路を開発中で、こちらは近日、学会発表される予定だという。
モジュラー型油圧ロボット
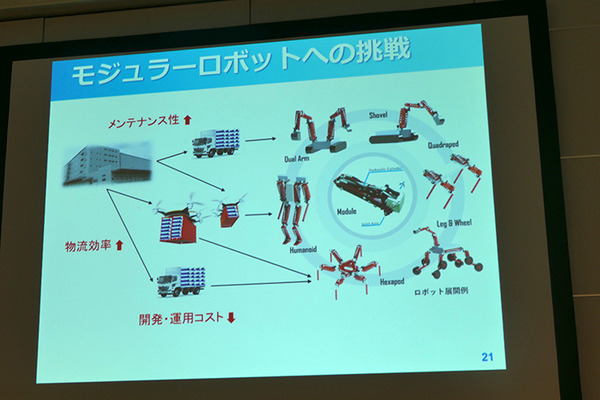
三つ目はモジュラー油圧ロボット。モジュラーロボットとは単関節あるいは2関節程度のブロック状のロボットを組み上げることで現場ニーズに応じたロボットを作れないかという考え方だ。これによって輸送と管理コスト、製造コストを下げられるのではないかという。電動では同じコンセプトが以前から提案され、研究されているが、実用化では壁にぶつかっている。それを力を出せる油圧でできないかというわけだ。たとえば空輸対応のショベルカーなどは現在も存在しているので、そのような領域ならばニーズはあるのではないかと考えているという。課題はパワー源と脱着機構とのことだ。
今回、ブースでもKYB-YS株式会社と共同開発中の実機が出展されてデモを行っていた。脱着機構には変形するダボを提案している。合体分離にもいまチャレンジしているところとのこと。
■動画
軽量な水圧駆動ロボット
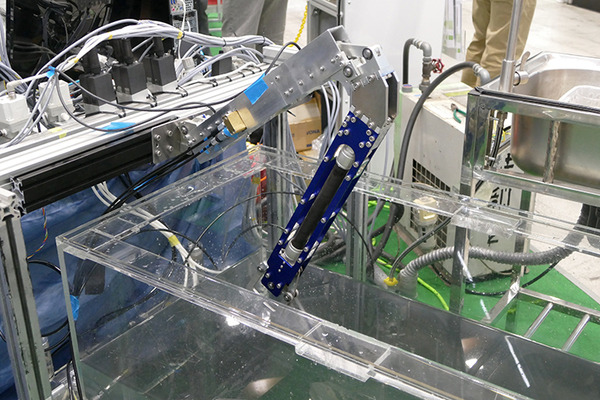
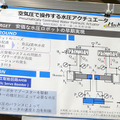
水圧駆動を使った遠隔ロボットにも3年前からチャレンジしている。玄氏らが考案した「AHSB(Air-Hydraulic Servo Booster、空気-液圧サーボ増圧器)」というポンプレスの水圧サーボシステムを2台1組で使って、一つの関節を拮抗駆動で動かす。空気圧サーボ弁でブースターを駆動、ブースターの増圧比によって必要な水圧を得て、左右の水圧のバランスで水圧アクチュエータの速度と力を制御してシリンダーを動かしている。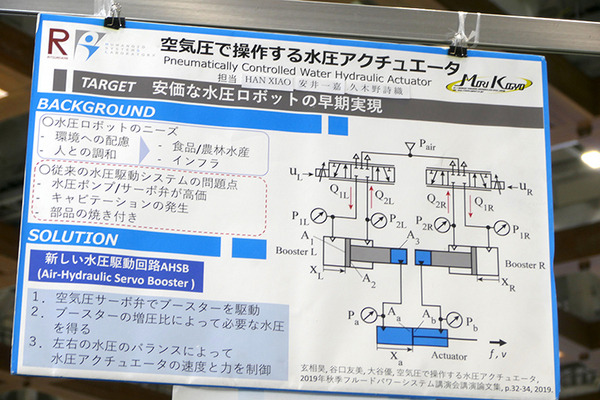
従来の水圧駆動システムには部品が高い、キャビテーションが発生するといた課題があったが、水圧と空圧の両者を組み合わせることで部品の焼きつきを防いだり、コストを下げることができるという。
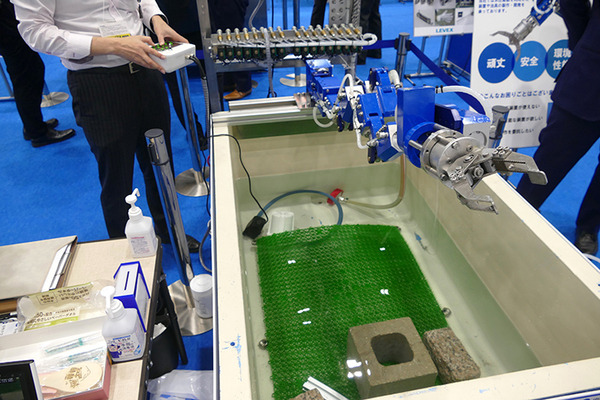
適用分野は農業や食品、水中作業などを考えているとのこと。油圧ロボットは食品分野では使いにくいため、そこを狙っている。原発ロボットは20MPa程度の領域で動かしているが、玄氏らのシステムは1MPaから14Mpa程度を対象としている。
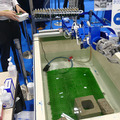
デモでは「一週間前にできたばかり」という3軸水中マニピュレータを動かしていた。こちらは水圧の小型プレスを手がける有限会社モリ工業との共同研究だ。
■動画
フルードパワーは「使える」が「売り方」が課題
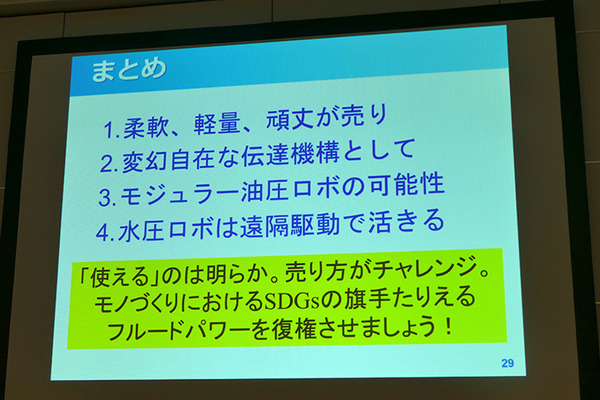
玄氏は講演の最後に「フルードパワーはロボットに使えるという例を示した。ただし使える=売れるわけではない。売り方そのものがチャレンジ。『この技術をどう使うか』と技術者は考えてしまいがちだが、アプリケーションがあってそれに適した技術は何かと考えたとえきにそのなかにフルードパワーが入ってこないとなかなか使われない」と語った。
油圧機器は耐環境性に優れ、耐用年数が長い。そのためSDGs面では有利だ。だがそれゆえに保守もしないで放置されていて、杜撰に扱われていることもあるという。「状態監視やメンテナンスをしっかりやれば、使い方を工夫することで電動に負けずに起死回生がはかれるのではないかと考えて研究を行っている」と語った。
水が機械を動かす 中外テクノスの水圧駆動ロボット
なお「IFPEX2021」では中外テクノス株式会社がオイルフリーの水圧駆動システムを紹介していた。単純な仕組みのリモコン操作のアームだが、重さ12kgの物体を持ち上げることができる。同じ原理のものが原発でも使われているという。
■動画
展示会では実際に操作を体験することもできた。1軸ごとに動かす必要があり、一見難しそうに見えるのだが、実際に動かしてみると意外と簡単に対象までアーム先端を持っていって、ブロックを掴むことができた。これも油漏れが許されない現場で適用されている。
アマゾンでも販売されている空気圧人工筋肉
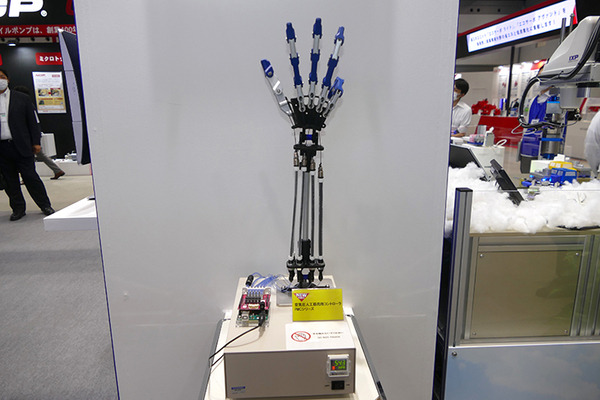
また、株式会社コガネイは空気圧人工筋肉用コントローラPMCシリーズを出展。こちらは細径のマッキベン式の空気圧人工筋肉「Pneumuscle(ニューマッスル)」と、それ向けのコントローラ(Arduino uno R3に対応したシールド基板)。バルブ選定や電源準備、回路設計、電気配線などの準備が必要なく実験などに用いることができるとしている。
ユニークな点はAmazonでも販売されているところ。「Pneumuscle」で検索すると人工筋肉、コンプレッサー、コントローラ、それぞれ販売されている。代理店を通さなくても簡単に購入することができる。
■動画