




近年、人手不足や倉庫の大型化から搬送作業へのロボットの導入が加速しているが、これまでは、搬送作業の自動化のためにロボットを導入しても、安全性確保のために走行速度を抑える必要があり、搬送効率が課題で生産性向上に繋がっていなかった。
その一方で、走行を高速化するには安全性確保のために搬送ロボット専用の通路やエリアを整備する必要があり、既存倉庫への導入は困難であった。
そこで、日本電気株式会社(NEC)は、ロボットによる倉庫内での搬送作業を、高い安全性を維持しながら従来比で効率を2倍向上させる制御技術を開発。同技術は、センサの測定誤差やシミュレーション結果と実際のロボットの動きの差など、ロボット制御における不確かな要素を表現できるモデルと、数理ファイナンスの手法を活用して、安全性リスクに応じてロボットを制御するリスクセンシティブ確率制御技術となっている。
なお、これらの技術は2023年度に実用化し、同社の協調搬送ロボットに搭載予定であり、技術の詳細については、2022年2月1日(火)~2日(水)に東京ビッグサイトにて開催される「ロジスティクスソリューションフェア2022」にて紹介する。
リスクセンシティブ確率制御技術について
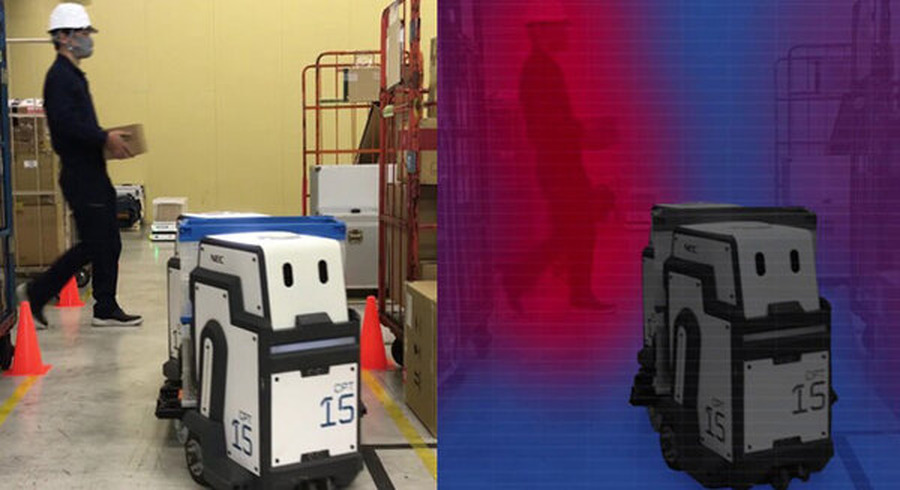
同技術は、ロボット制御において、安全性と効率を高レベルで両立させることのできる技術だ。たとえば開発を進めている倉庫内の搬送ロボット(AGV)では、人やモノへ接触しないように安全を確保することが現場導入するうえでの大前提となる。しかし、安全性を確保するためにAGVが低速であったり、あまりに一時停止を繰り返たりしてしまうようではロボットとして使い物にならない。物流倉庫は時間あたりに何個運搬できたかという数が利益につながるシビアな世界で、スループットの追求も非常に重要なため、同技術は、このようなシーンで役立つ技術として開発された。同技術を搭載したAGVは、従来型のAGVと比較すると、安全性を損なうことなく平均速度を約2倍向上する。また、危険な狭い道では速度を落としてぶつからないように走行することもできる。今までの実験では、従来型のAGVは10回中9回周囲の壁に衝突してしまったのに対し、新技術を搭載したAGVは一度もぶつかることなく狭いクランクを通り抜けられる。周囲の人やモノへの衝突や接触を高いレベルで回避でき、ロボット専用の搬送通路を用意しなくてもよいので、導入時のコストも抑えることが可能だ。
同社の協調搬送ロボットについて
従来のAGVは、ユニットロードを搬送するために、ユニットロードをAGVに載せる、あるいは治具によって掴むことなどが必要になり、ユニットロードの形が変化すると、新たな治具の開発や、AGV形状に合わせたユニットロードの開発などが必要であったが、同ソリューションに用いる次世代型AGV「協調搬送ロボット」は、自在輪が付いている多様な形状のユニットロード(カゴ車、平台車等の荷物搬送機器)を人のサポートなしに、2台のロボットで挟み込む形で保持し、搬送指示画面からあらかじめ設定した留置位置まで搬送、留置できることが可能だ。
https://jpn.nec.com/event/lsf202202/index.html
日本電気株式会社



