





株式会社オカムラは、2022年1月24日に発表した「PROGRESS ONE(プログレスワン)」事業で、AIを搭載した自律ピッキングロボットおよび遠隔操作システムのプロトタイプを公開する。2022年3月9日~12日(オンライン会場は2022年3月1日~18日)に開催される世界最大規模のロボット専門展「2022国際ロボット展」(iREX2022)にて展示・デモンストレーションを行うことを発表した。
同社は「物流現場の働き方を変える」ことをビジョンとして、2016年から事業の構想検討を開始、ビジネスモデルの検討やAI搭載ロボット・遠隔操作技術の開発を行っており、その一環として、物流施設においてAIを搭載したロボットと遠隔操作技術を組み合わせて、ピッキング作業の自動化と遠隔操作による場所と時間にとらわれない新しい働き方を創造する「PROGRESS ONE」の事業化に向けた取り組みを進めている。
同事業に活用するAI搭載のロボットと遠隔操作プラットフォームは、引き続き自社開発を進めており、「PROGRESS ONE」に活用するAI搭載のロボットと遠隔操作プラットフォームは、引き続き自社開発を進めています。さまざまな対象物に対応出来るエンドエフェクター(ロボットハンド)や対象物検出技術、動作計画策定に関わるAIをはじめとする技術開発パートナー、実証実験パートナーとの連携を検討。2022年度より物流現場での実証実験を行い、2023年度以降のサービス提供開始を目指している。
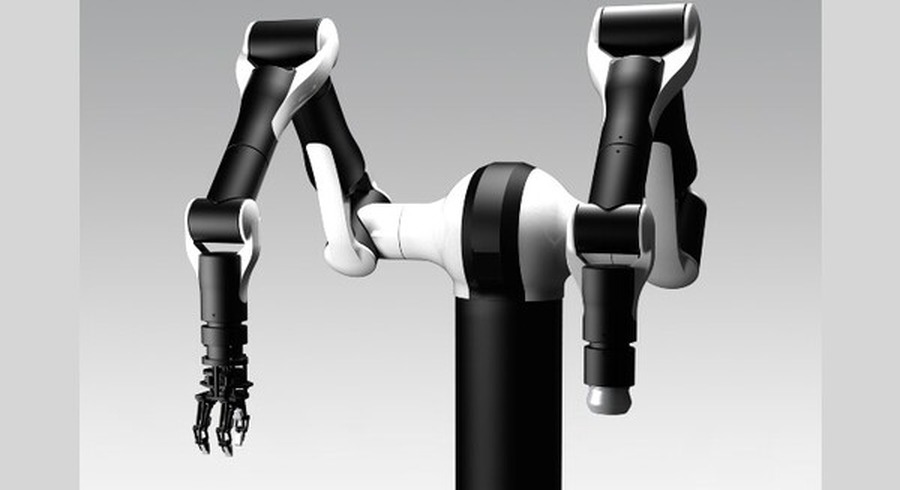
(※冒頭の画像:双腕ピッキングロボット)
「PROGRESS ONE」について
「PROGRESS ONE」は、AIを搭載したロボットによる自律ピッキングと、ロボット単独では難しい作業を遠隔操作技術の活用により人が倉庫から離れた場所でロボット操作を行い、遠隔でピッキング作業を行うハイブリッド型の物流自動化ソリューションだ。AIを活用したロボットの自律動作とオペレーターによる遠隔操作を使い分けるハイブリッド動作制御を実現し、従来の自律型ロボット単独では難しい作業や多種多様な商品への対応が可能。AI搭載ロボットを操作するオペレーターは、倉庫から離れた都市部や住宅地などの利便性のよい場所に設けられたオペレーションセンターへ勤務し遠隔操作を行うことができ、物流現場での新しい働き方を実現。これにより、従来の運用では時間や場所、身体などの制約によって物流現場で働くことが難しかった働き手へ雇用を創出する。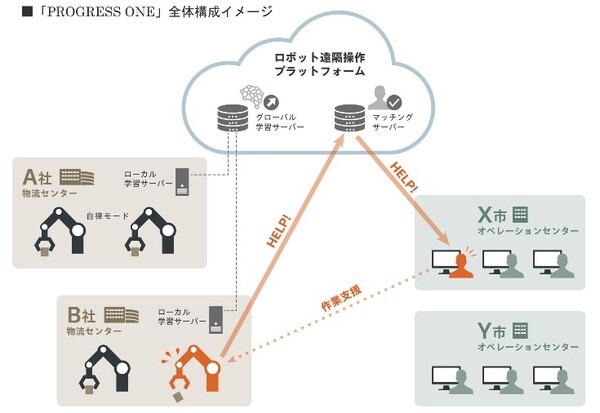
なお、「PROGRESS ONE」という名称は、“Picking Robot of Grateful Engineering Smart System”の略称であると同時に、物流業界における働き方を前に進める一助となるとの意味を込めている。
「PROGRESS ONE」プロトタイプについて
今回展示するプロトタイプは、双腕のピッキングロボットとオペレーターが操作する遠隔操作システム、機械学習を備えた自社開発AIで構成されている。同社は、ピッキング作業をAI搭載ロボットと人の遠隔操作の両方で行うことで、物流現場の自動化・省力化を実現し、時間や場所、身体などの制約によって物流現場での就労が難しい働き手へ新しい雇用を創出すると述べている。
双腕ピッキングロボット
双腕のピッキングロボットは、吸着と多指ハンドを対象物に合わせて使い分けることができ、両腕を使うことで、蓋つきの箱など単腕のロボットでは難しい対象物をつかみ上げることが可能だ。
・2本のアームと2種のエンドエフェクター
吸着と多指ハンドを対象物に合わせて使い分けることが可能。両腕を使うことで、蓋つきの箱など単腕のロボットでは難しい対象物をつかみ上げることができる。また、深さのあるコンテナの場合でも垂直方向に奥までつかめるアーム構造になっている。
・人が操作しやすい構造のアーム
自社開発したアームは、関節の数や寸法の比率を人の腕の動きに近くなるように設計し、オペレーターが遠隔操作をする際に、操作をしやすい構造にしている。遠隔操作をする際に、オペレーターの習熟度に左右されることなく、高い操作性を実現する。
遠隔操作システム
遠隔操作システムは、自律ピッキングから遠隔操作に切り替わる際のマッチング機能と遠隔操作機能を備えている。
・マッチング機能
マッチング機能は、自律ピッキングができず自律動作からオペレーターによる遠隔操作に切り替わる際、ロボットと待機中のオペレーターをマッチングし接続する仕組みだ。これにより1人のオペレーターがさまざまな物流拠点に設置された不特定多数のロボットを遠隔操作することが可能となっている。
・遠隔操作機能
マッチング後、オペレーターはAIの対象物認識を補助するために対象物をマウス操作で指示する「対象物指定モード」で操作する。「対象物指定モード」でピッキングできない場合は、ゲームコントローラーでアームを操作する「ゲームコントローラーモード」や、操作に適した形状の専用データグローブとジェスチャーを認識するカメラでアームを操作する「モーションキャプチャーモード」で遠隔操作を行い、対象物をピックする。


機械学習を備えた自社開発AI
・事前のデータ・商品登録が不要
ピッキング対象物の認識には同社で独自に開発したAIを活用し、事前のデータ・商品登録が不要だ。
・AIによる継続学習で作業効率を向上
ロボットの自律ピッキングとオペレーターによる遠隔操作の動作データはクラウド上のグローバル学習サーバーに集約。継続的に機械学習を行い、各拠点のロボットにフィードバックすることでAIが認識できる対象物を拡充し、現場で使うほど作業効率が向上する仕組みになっている。
「2022国際ロボット展」展示・デモンストレーション
同展において、同社は、3月1日~18日開催のオンライン会場では、同事業の概要を説明する。また、3月9日~12日開催のリアル会場では、プロトタイプの展示とデモンストレーションを実施予定。リアル会場での3月11日講演・パネルディスカッションに登壇を予定している。
「2022国際ロボット展」オンライン会場(※入場登録が必要):https://irex.nikkan.co.jp/online
株式会社オカムラ関連記事(ロボスタ)
株式会社オカムラ






