竹中工務店、NTTドコモビジネス株式会社、アスラテック株式会社の3社は、空間IDを活用した建設現場のロボット運用システム「ロボットナビゲーションシステム」を共同開発したと発表した。
※空間ID:経済産業省などが策定を進めているデータ規格。3次元空間を立方体(ボクセル)に分割し、各ボクセルに固有のIDを割り当てることで、地球上のあらゆる位置が特定可能。
開発の背景と課題解決
建設業界では労働力不足の解消や安全性・生産性の向上のため、人の代わりに作業するロボットの開発が進められている。しかし、建設現場でのロボット運用には、屋内・屋外間を3次元方向に移動することの困難さや、自律移動に必要なマップの整備にコストがかかるなどの課題があった。
竹中工務店、NTTドコモビジネス、アスラテックの3社は2022年から空間IDを活用したロボット運用システムの開発に着手し、四足歩行ロボット「Spot(スポット)」などを用いて建設現場を巡回させる実証実験を実施してきた。
システムの特長と連携機能
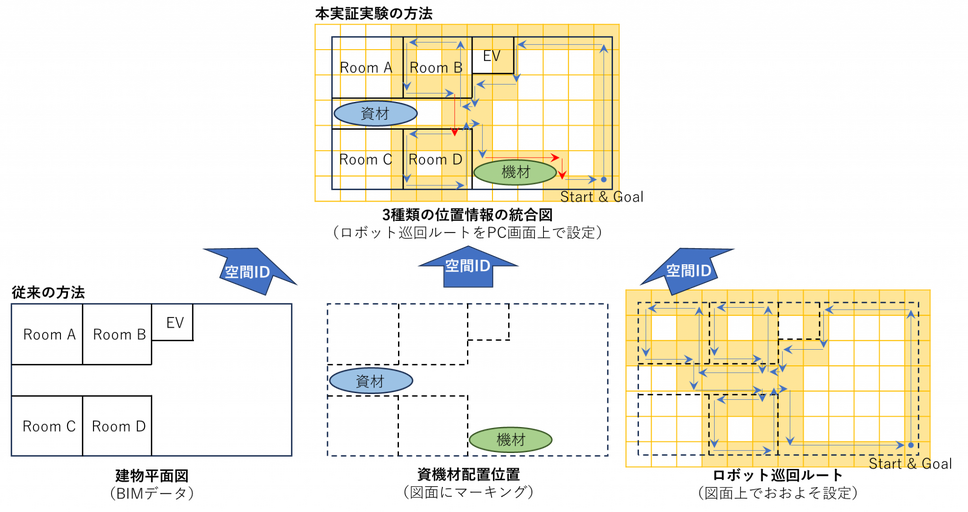
本システムは、NTTドコモビジネスが展開する建設現場の作業間調整を支援するサービス「tateras(タテラス)作業間調整」と空間IDの3次元位置情報を組み合わせることで、建設現場内におけるロボットの自律移動を可能にする。
「tateras作業間調整」に入力される建設現場の図面および施工管理情報(日々の作業箇所、重機の位置、資機材の搬出入など)をもとにマップを構築し、空間IDを活用してロボットの移動ルートを設定している。
施工管理情報に対して開始・終了時刻と実スケール(mm単位)を付与することが可能なため、ロボットの走行計画作成時に走行可能な十分なスペースが確保できるかを、時々刻々と変化する施工状況と照らし合わせながら柔軟に計画できる。
3次元空間での高精度運用を実現
ロボットの移動空間に対しては、3次元空間上の位置を指定可能な空間IDを用いることで、屋内外や上下階の移動が生じる複雑な建設現場においても、各エリアで生成されたマップを統合し、シームレスな自律移動を行う。
さらに、空間IDをシステム間連携の共通言語として活用することで、異なる種類のロボットや複数台のロボットの同時運用を実現した。
実証実験の成果
竹中工務店の建設現場で実施した実証実験では、本システムを用いたロボットの巡回作業により、現場職員の確認作業の負担が軽減され、業務時間を約30%削減できた。
また、空間IDをシステム間の共通言語として活用することで、ロボットのシステム開発コストも約30%の削減が可能である。
なお、この成果は国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の委託業務(JPNP22006)の結果、得られたものである。
各社の役割分担
竹中工務店は建設現場のナレッジ提供、システム全体企画、実証現場の提供、実証実験効果検証および考察を担当。NTTドコモビジネスは本システムと「tateras作業間調整」の連携機能の開発、建設現場向けに3次元情報と時間を組み合わせた4次元時空間情報基盤の提供、実証実験の実施、効果検証および考察を行う。アスラテックは本システム開発、Spot向けカスタマイズ機能の開発、実証実験の実施を担当している。
竹中工務店・鹿島建設・アクティオが資機材自動搬送ロボットを開発 BIMデータを参照して所定の位置まで自律走行で資機材を運ぶ
4人乗り大型4足歩行型ライド『SR-02』にハロが合体?三連休に特別公開 「BALGOI」ハロも進化!「GUNDAM NEXT FUTURE SCIENCE展」