
月は地球から生まれたのか?
JAXA(国立研究開発法人宇宙航空研究開発機構)は月着陸・月マントル成分調査、月面移動、撮影等を実証する月面プロジェクトを発表した。それに伴い「小型月着陸実証機「SLIM」及び小型プローブ「LEV」の記者説明会」をオンラインで開催した。
この計画は、月の周回軌道に乗った月着陸実証機「SLIM」(Smart Lander for investigating Moon)が「画像航法」を使って月面にピンポイントで着陸すること、月のマントル成分を調べて地球に送信すること等が任務となる。また、「SLIM」に搭載する小型プローブ「LEV-1」(レブ-ワン)と超小型の月面ロボット「LEV-2」(SORA-Q:ソラキュー)を着陸の直前に射出し、大小2基の「LEV」が月面を跳躍して(3m飛ぶ)移動したり、月面のスリムを撮影して、周囲のデータとともに地球に送信することも重要なミッションとなっている。
打ち上げ時期は2022年度中(詳細は未発表)。月着陸降下は打上げ後、4~6ヶ月後を予定している。
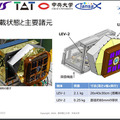
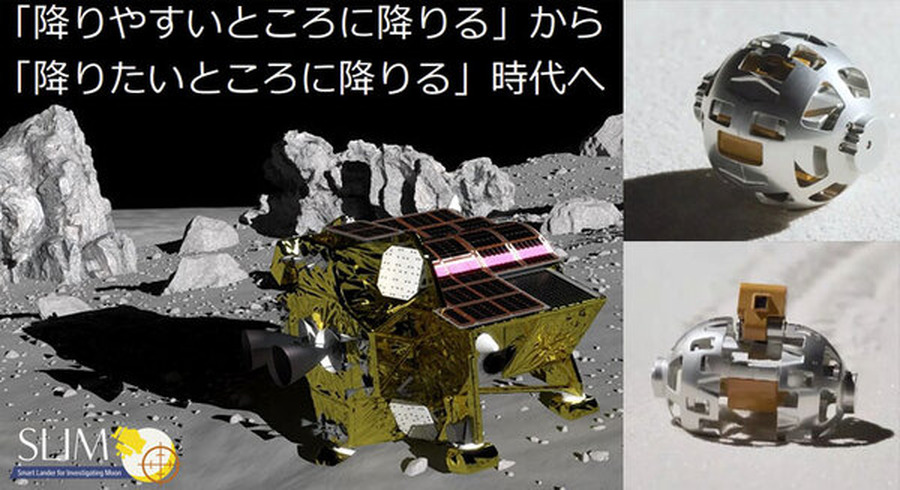
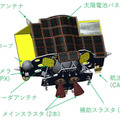
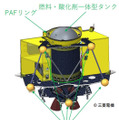
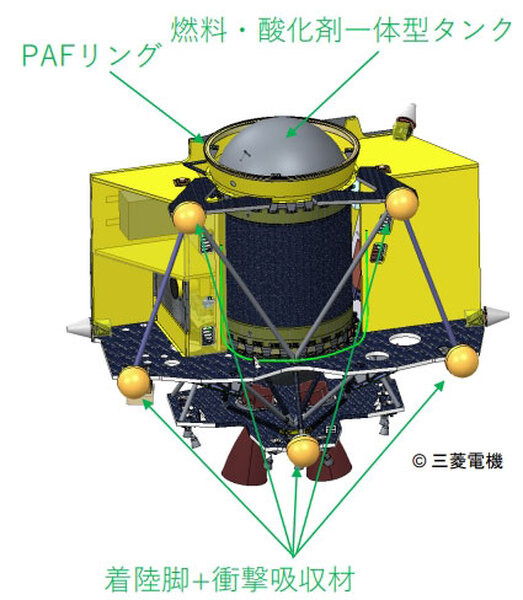
▼ 月着陸実証機「SLIM」(「LEV」2基を搭載して月面に向かう)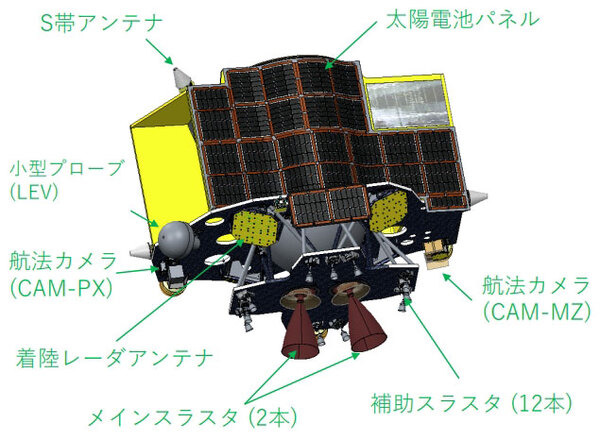
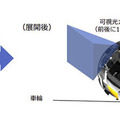
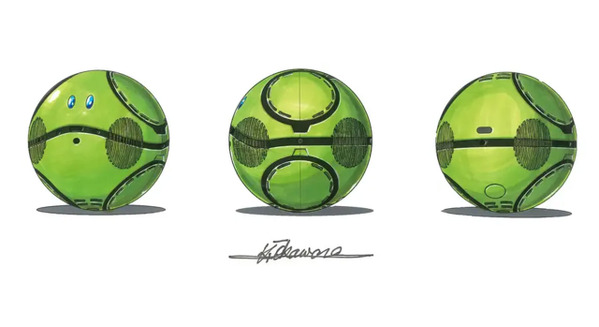
▼ 小型プローブ「LEV-1」(左)と小型の変形型月面ロボット「LEV-2」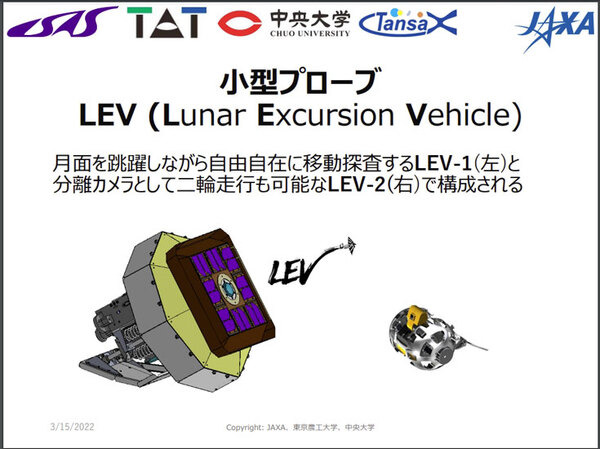
月着陸実証機「SLIM」が月面へ
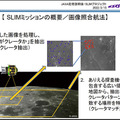
「SLIM」はロケット「H-IIA 相乗り」で打ち上げられ、SLIM自身の推進機構で月周回軌道へと向かう。燃料消費の少ないコースで時間をかけて月周回軌道に乗り、着陸降下を開始すると、航法カメラによる「画像航法」を行い、(月面のクレーターから)高精度に自身の位置を推定しながら、自律的な航法誘導制御によって月面上の目標地点に接近する。その精度は狙った100mの円内で更にピンポイントで地点を特定する(従来の月着陸精度は数km~10数kmのため、飛躍的な進歩が期待される)。
JAXA 宇宙科学研究所 SLIM プロジェクトチームのプロジェクトマネージャー坂井真一郎氏によれば「月周回衛星「かぐや」や「LRO」が高分解能な月面観測データを大量にもたらした結果、現在の月探査ミッションは、「あのクレーターの隣のあの岩石」といった粒度で議論されるようになっている」という。そして、今回のミッションでは、SLIMは航行中に撮影した画像を処理し、「どこがクレータか」を抽出、探査機の自位置を推定し、広い領域の地図の中から、抽出されたクレーターのパターンと一致する場所を特定する「クレータマッチング」という技術も用いて、高精度でピンポイント着陸を実現する。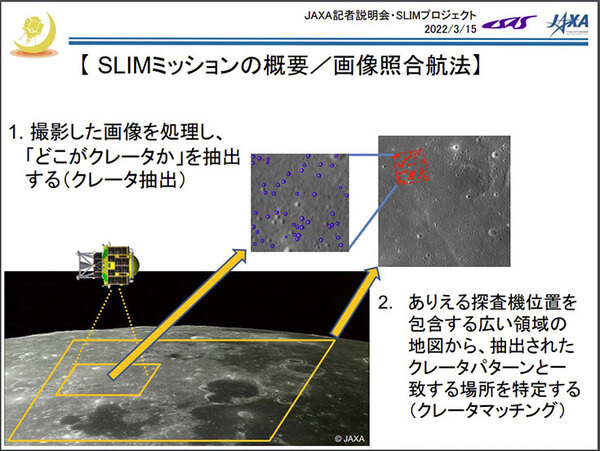
「SLIM」は、月周回軌道から15kmまで高度を下げて着陸シーケンスに入り、その後20~30分で月面にピンポイントでの着陸を目指す。月周回軌道からの降下や着陸候補地点を認識するため、「SLIM」はカメラを使って月面を撮影し、クレーターの形状や位置から月のどのあたりを飛行中かの自位置の推定を行うしくみが取り入れられている。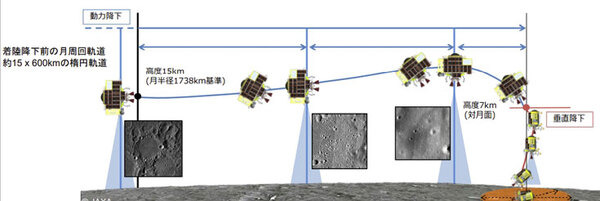
月は地球から生まれたのか? マントルの成分を調査
「SLIM」は、月のマントル成分を含むと思われる「カンラン石」のそばに着陸し、その成分を調査する計画で、月のマントル成分と地球の成分とを比較することで、「月は地球から生まれたのか」それでも「まったく異なる成分で誕生して地球の衛星となったのか」を調査する重要な手かがりとなると思われる。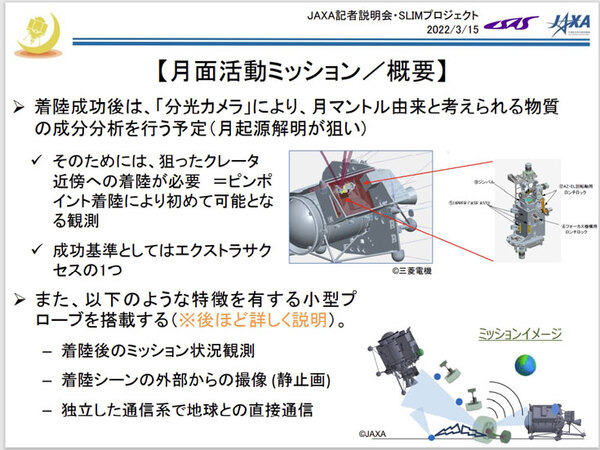
SLIMは、以下の2つの目的を達成することで、将来の月惑星探査に貢献することを目指したJAXAプロジェクトである。
• ≪目的A≫月への高精度着陸技術の実証を目指す
従来の月着陸精度は数km~10数km
SLIMでは100mオーダーを目指す
キーとなる技術は、「画像航法」および「自律的な航法誘導制御」
• ≪目的B≫軽量な月惑星探査機システムを実現し、月惑星探査の高頻度化に貢献する
小型プローブ「LEV-1」は跳躍移動と地球との通信、変形型月面ロボット「LEV-2」の任務は・・
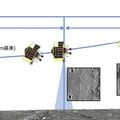
ここでもうひとつのミッションに触れる。月着陸実証機「SLIM」には「LEV」という小型プローブ「LEV-1」と超小型の月面ロボット「LEV-2」が搭載されている。月面に自由落下する「SLIM」から着陸直前、高度1.8mの位置からこの2基の「LEV」を月面へと射出する。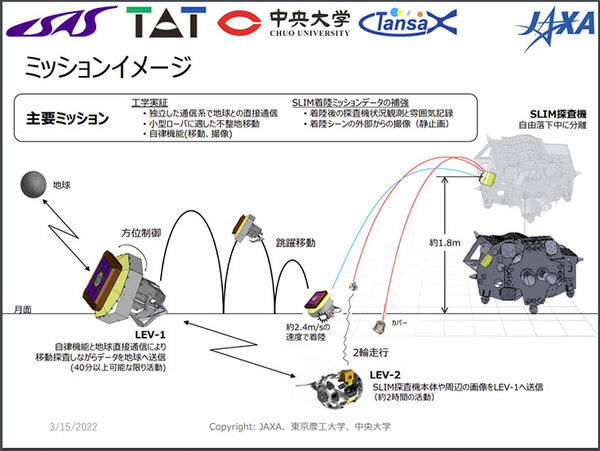
投下された「LEV-1」は月面に到着後、珍しい跳躍移動(跳ねる)で月面を自由自在に移動探査する。「LEV-2」は分離カメラとして行動し、二輪走行も可能な変形ロボット。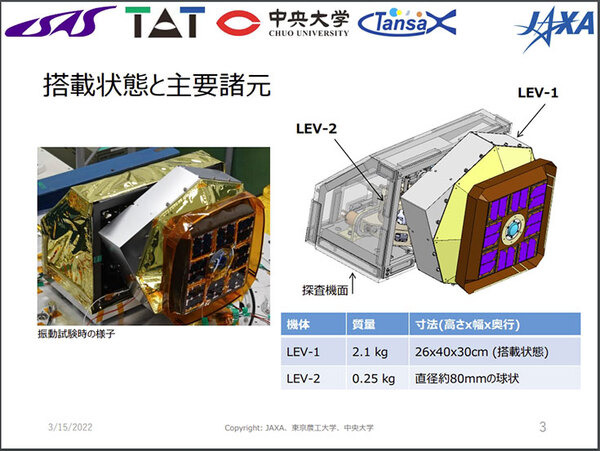
「LEV-1」は地球と直接通信する能力を持ち(通信速度は約1K/bpsが見込まれている)、SLIM探査機からの展開機能を実証するとともに、SLIM探査機の着陸条件に関わるデータを取得して地球に送信する任務を担う。更には月面での自律機能および移動技術(跳躍移動)を実証すること、SLIM探査機本体の着陸状況および着陸地点周辺の情報を取得することが目的となる。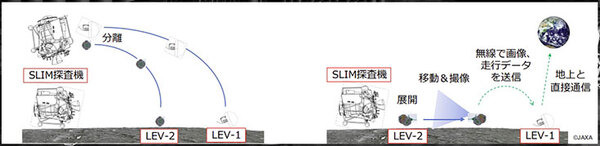
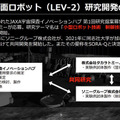
「LEV-2」は「LEV-1」との通信機能を持ち、LEV-2が撮影した画像はLEV-1を経由して地球に送られる。「LEV-2」のミッションは、自動で月面を走行し、撮像すること。LEV-2に搭載したカメラ(前方と後方の2台)により、SLIM探査機本体も撮像する計画で、着陸状態を観測するという任務も担う。撮影した画像の中から良質のものを自動で選定してLEV-1を経由して地上に送信、LEV-2に搭載したIMU及びエンコーダのデータから月面における走行結果を評価する、といったものになる。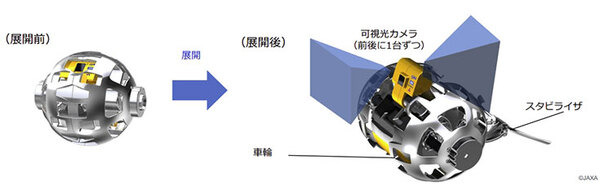


この「LEV-2」の開発にはJAXA 宇宙探査イノベーションハブのほかに、タカラトミー、同志社大学、ソニーグループが関わっている。「LEV-2」については別記事で詳細をお伝えしたい。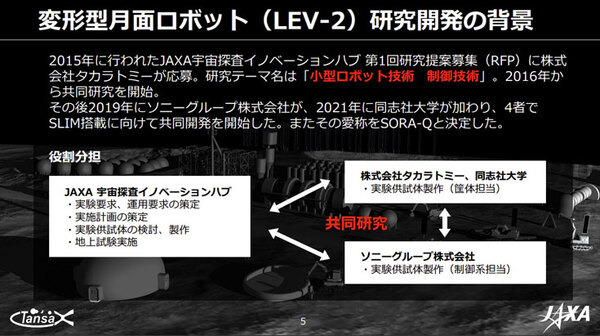
後編に続く「【速報】JAXAの変形型月面ロボットの愛称は「SORA-Q」(ソラキュー) タカラトミーが動画を公開 同志社やソニーと共同開発」
JAXA 小型月着陸実証機「SLIM」