


日本機械学会では七夕の中暦にあたる8月7日を「機械の日」、8月1~7日を「機械週間」(メカウィーク)とし、毎年「機械」の意義や役割を広く社会と共に考え、人間と機械のふさわしい関係を模索するためのイベントを行なっている。2022年8月7日には「2022年度『機械の日』記念講演」が開催された。
三菱重工業によるカーボンニュートラルに向けた取り組み、付加価値の高い機械の実現などについての講演も行われたが、ここでは、そのうちの一つ、早稲田大学 理工学術院長 教授の菅野重樹 氏による『スマートロボットが活躍する未来社会』と題された講演をレポートする。
「ロボットは動いてなんぼ」 早稲田のロボット開発の歴史

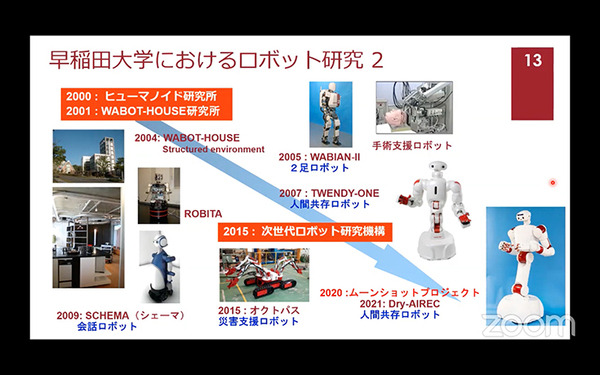
菅野氏はまず、ロボット研究の流れと課題について早稲田のロボット開発を例に解説した。早稲田のロボット開発は、日本のロボット研究の創始者とも言える故・加藤一郎氏による研究から始まっている。
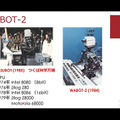
1973年の「WABOT-1」は世界初のヒューマノイドロボットである。当時から工場ではなく人にサービスを行うロボットを志向していたという。菅野教授は新幹線(1964)、アポロ11号月面着陸(1969)を引き合いに出して時代背景を解説した。まだコンピュータ中心ではなく、機械技術が中心だった時代である。ヒューマノイドロボットの実現、すなわち、人とほぼ同じ大きさで多くの関節を持ち、周囲の状況を理解して動きを決める計算機を収め、システムインテグレーションして一つにまとめることは当時はとても難しかった。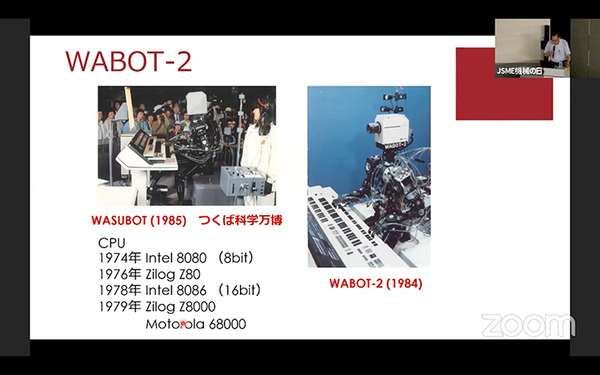
また、当時は「そんなロボットが本当に必要なのか。遊びではないのか」という声も大きかったという。菅野教授自身が中心となって開発し学位を取得した「WABOT-2」は、1985年のつくば科学万博でピアノを演奏した。このときも、海外の来場者からは「なぜ人型なのか」という質問が多かったという。菅野氏は、人とインタラクションするためには人型がいいという説明をして納得してもらっていたと当時を振り返った。
「WABOT-2」の頃はミニコンからマイコンへと移り変わっていった時期にあたる。そこで「これからは情報技術を活用して人と合わせられる繊細なロボットを作るべきだ」という話になり、目で楽譜を読み、自動で演奏し、歌声を認識して伴奏できるロボットを開発することを目標とした。当時、100台くらいのマイコンを使って計算をさせ、当時の価格では300万円以上した80MBのハードディスクをメモリとして増設して動かした。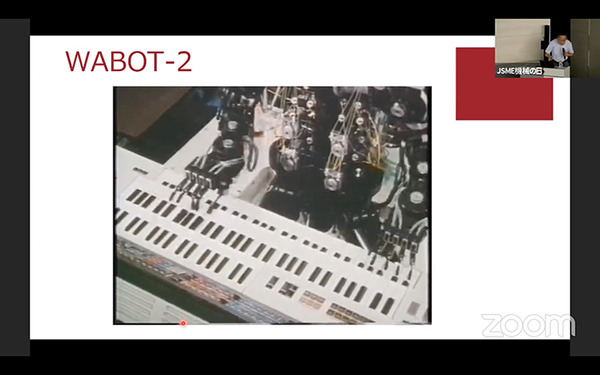
では、これをいま作り直したらどうなるか。CPUは全く変わるが、ロボットの機械本体の設計はあまり変わらないのではないかという。菅野氏は、機械はシミュレーションではダメで、「特にロボットは動いてなんぼ」だと語った。
人間の指の巧みさの秘密 ロボットはハードウェアが重要

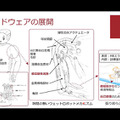
その後、早稲田のロボット開発は今でも続いている。菅野教授が特に意識しているのは人間の指だという。多くのロボットは力学的解析のやりやすさから半球ドーム型の指にしていることが多い。だが人間の指が器用である理由の一つは、この独特の形にある。人間の指の場合、対象に対して点接触するのではなく、摩擦あり面接触になる。つまり、同じ力であっても接触面積が変わり圧力が変わる。これによって巧みさが上がる。力制御だけでは巧みさは出ない。
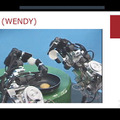
菅野氏は、爪がある人間の指のような構造を持たせたロボット「WENDY」によるたまご割りを紹介した。通常の点接触の指のロボットでは、卵の殻を壊すことはできても、巧みに割ることはできないという。菅野氏は「いかに優れた制御をしてても、まずメカが良くなければ、ロボットの機能はできるできないのレベルで大きく変わってくる」と述べた。これがロボットにおいてハードウェアが重要である理由だ。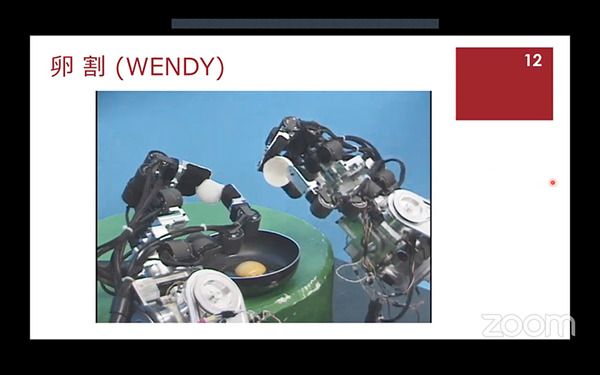
ムーンショット目標3、項目1 自ら学習・行動し人と共生するロボットの実現
ロボットはシステムインテグレーション技術であり、様々な技術の融合がポイントだ。値段も発展速度も全く違う、機械技術と情報技術の発展のギャップをどう考えるかも重要である。また生産台数の問題もある。残念ながら、ロボットで量産によるコスト低減を目指すのは難しい。これは家庭や作業現場への導入を考えると大きな課題だ。東日本大震災での福島第一原発事故への対応時には理想と現実の違いを多くのロボット研究者が突きつけられた。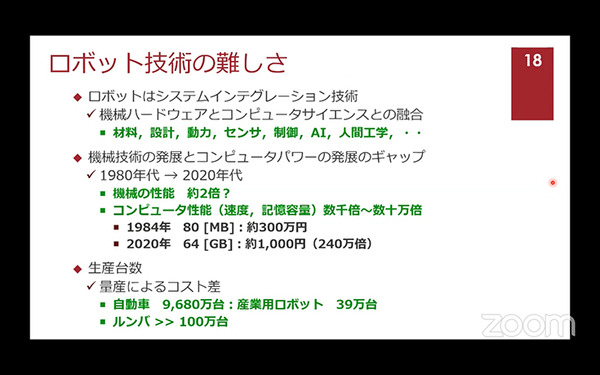
さて、今後はどうするべきか。内閣府「ムーンショット型研究開発事業」は2050年が一つの区切りとなっており「目標3:一人に一台一生寄り添うスマートロボット」は、2050年までにAIとロボットの共進化により、自ら学習・行動し人と共生するロボットを実現することを目指している。
「目標3」では3つの項目が掲げられている。項目1は「2050年までに、人が違和感を持たない、人と同等以上な身体能力をもち、人生に寄り添って一緒に成長するAIロボットを開発する」とされている。PMは現在4人で、今後さらに数名増えることになっている。菅野氏と東北大学の平田泰久氏がこの項目1の研究開発プロジェクトを手がけている。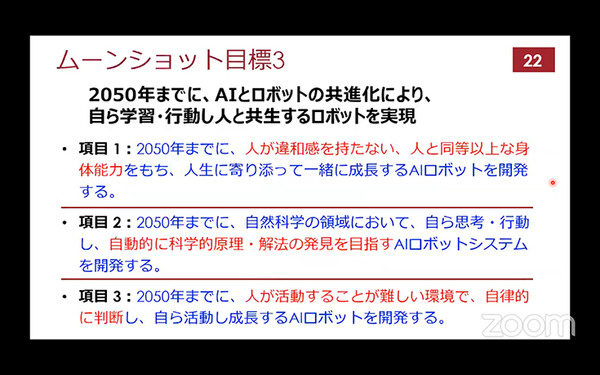
スマートフォンのように一つの道具で全てできることを目指すロボット「AIREC」
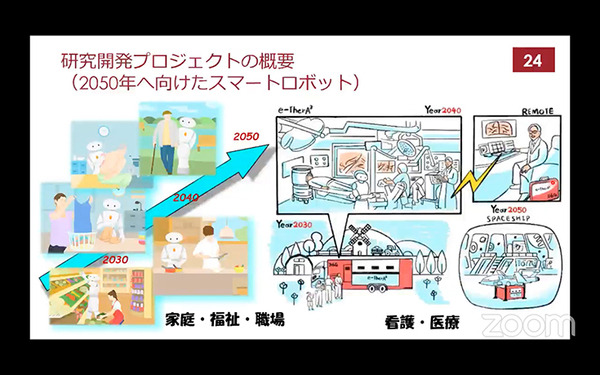
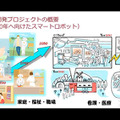
2050年に向けたスマートロボット開発を目指す菅野氏のプロジェクトでは、家庭、福祉などの分野に投入できるロボットを想定している。特徴は、それぞれの分野に特化したロボットを開発するのではなく、同じロボットが、全ての分野で使えることを目指す。さらに看護や医療分野への適用も目指す。最終的には宇宙ステーションでも活用できるようなロボットを目指す。公式サイトはこちら(https://airec-waseda.jp/)。
スマートロボットとは、スマートフォンのように、一つの道具で全てできることを目指すコンセプトだ。ゆくゆくはロボットもそこを目指すべきだという考え方だ。これに「AIREC(AI-driven Robot for Embrace and Care)」と名前をつけて研究を進めている。
開発においては、自動運転のようにタスクレベルを想定すべきと考えて、レベル5を完全自律として、そこからバックキャストしてレベル1までを設定して研究開発に取り組んでいる。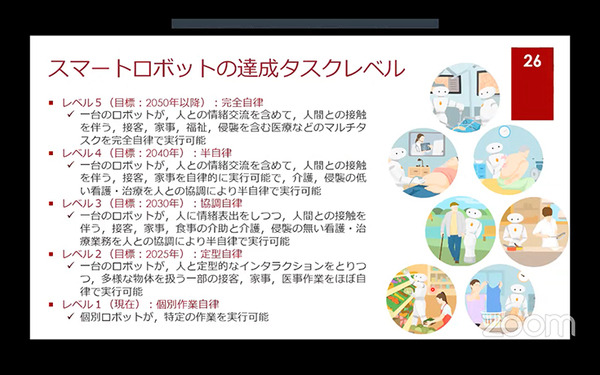
身体とAIを完全に一つとして考える「身体知」
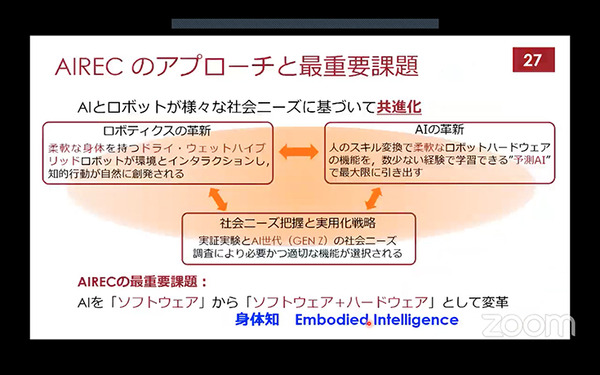
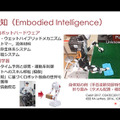
アプローチの特徴は、ロボティクスとAIが組み合わさるところだ。前述の人間の指のように、ハードウェアすなわちかたち、制御と、AIを結びつける。菅野氏は「ハードウェアがあって、そこに制御を入れるという話ではない。ソフトウェア+ハードウェアとして変革する」と述べた。それを身体知(Embodied Intelligence)としている。これはいわゆる「デジタルツイン」とは別物で、「完全に一つとして考えるもの」だと強調した。
一つの例として早稲田大学次世代ロボット研究機構AIロボット研究所所長の尾形哲也氏による深層予測学習を使ったロボットによるタオル畳みを紹介した。人が操作をしてロボットにスキルを学ばせる。そうすると ロボットがある動作を学習する。ロボットの手首にはバネのような弾性要素が入っているが、ロボットはその自身のハードウェア特性そのものを、丸ごと込みで学習する。こうして、身体特性とAI学習が組み合わさる。
将来はドライとウェットのハイブリッドなロボットへ
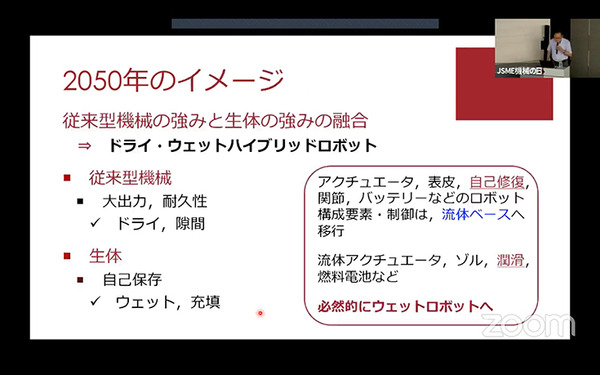
では、さらに将来はどうなるか。菅野氏はやわらかいハードウェア、そしてウェットなハードウェアを目指している。機械というより化学的な方向に進んでいくという。菅野氏は、従来型機械の強みと生体の強みを融合した「ドライ・ウェット・ハイブリッドメカニズム」について解説した。
生体は自己修復の機能を持っている。それらがどんどん機械に入っていく。また構成要素や制御には流体系が入っていく。アクチュエーターや表皮なども流体ベースとなり、ロボットもウェットロボットへ行くだろうという。ゾル、潤滑、燃料電池などもあり、必然的に最終的にはハイブリッドとなっていくだろうという。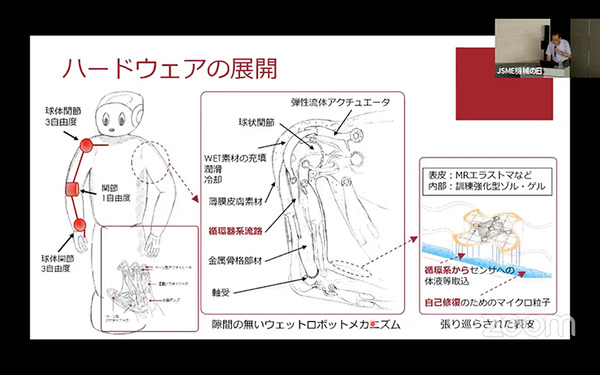
現在はまだ構想図の段階だが、将来のロボットについても紹介された。弾性流体アクチュエータや金属骨格部材を中心に、表面も柔軟素材で覆い、循環系があって、自己修復のためにマイクロ粒子が流れるような構造だ。いまは弾性流体アクチュエータの基礎研究を行なっているという。
柔らかく、高出力なロボット「Dry-AIREC」
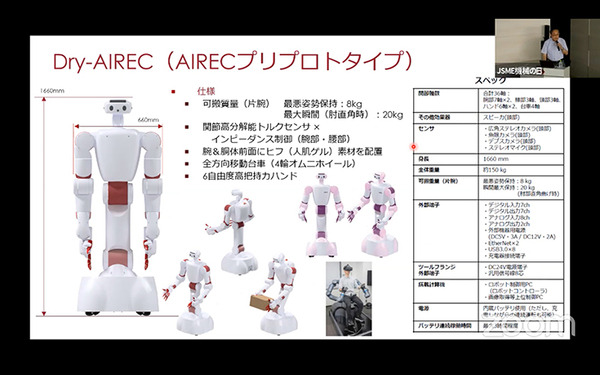
まずは従来型のドライロボットでどこまでできるかを示したほうがいいと考えて、学習や人のスキル獲得の研究を行なっている。それが「Dry-AIREC(ドライ・アイレック)」だ。スタートアップの東京ロボティクスが作ったハードウェアを用いており、各関節には高分解能のトルクセンサが内蔵されており、表面には人肌ゲル素材が用いられている。動き自体もやわらかく、人が外から動かしても綺麗に追随できる。
■動画
やわらかさと高出力も両立しており、可搬質量は最大瞬間で20kg。最悪姿勢でも8kgを保持でき、人間をベッドからく車椅子へと移乗補助できる。
■動画
さらに環境適応の例として、雑巾で台を拭く動きを示した。
■動画
現在はこのポテンシャルの高いロボットを、生活環境を模した評価実験施設を早稲田大学内に作って研究を行なっている。
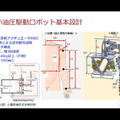
新しい油圧駆動ロボットも
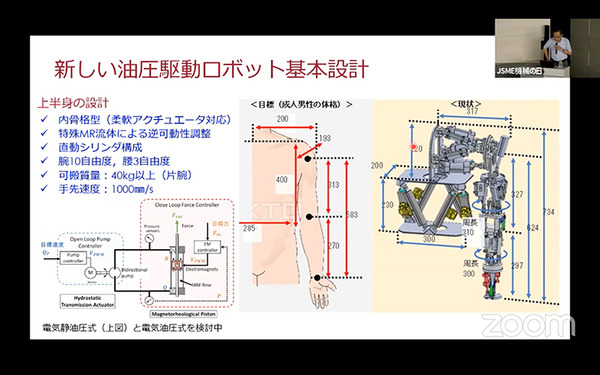
さらに流体駆動を取り入れ、新規材料を使った油圧駆動ロボットの開発にも取り組んでいる。内骨格型でMR流体と直動動シリンダを使う。上半身自由度21、可搬質量は片腕で40kg以上、両腕最悪姿勢時で55kgを目指すとスペック的には他の様々なロボットを凌ぐ予定だという。
将来のAIロボットが情動を持つことは必然
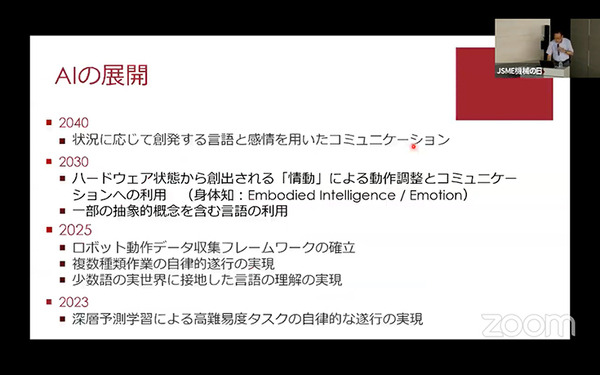
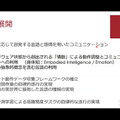
将来のAIのイメージを考えると、身体性の観点を入れることで生命のような自己保存・自己修復の視点が入ってくるという。そしてAIに報酬を与えて学習させることは、動物の原始的情動反応につながるのではないかという。
今はタスクの自律遂行の段階だが、それが言語コミュニケーションの話になり、それがハードウェアから早出される情動による動作調整とコミュニケーションにつながるのではないかという。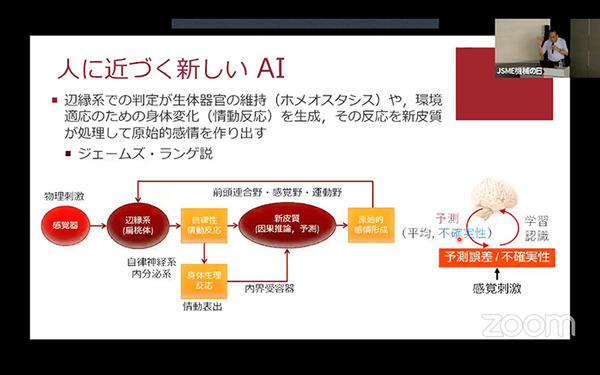
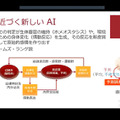
本質的には、生体のホメオスタシスのようなものをロボットのなかに組み込み、原始的情動が必然的に出てくるだろうと述べ、「AIが学習するのは外界からの感覚刺激に対して予測する、その不確実さを学習すること。このループによって知能が高まっていく。その話は外からの物理刺激に対して中でどうやって学習していくかという仕組みに他ならない。この役目をそのままロボットの制御に置き換えると人の感情や知能が生まれる仕組みと同じ話になる。現時点ではレベルは低いが、根本的には仕組みは同じなので、いずれそこにつながるだろう」と述べた。
ではどうやって作り込んでいくか。菅野氏はロボットでスクランブルエッグを作る研究を紹介した。ロボットは外界の状態を見ながら、どういう状態なら最適になるかロボット自身で学習していく。スクランブルエッグを作る工程には様々な不確実性があり、全く同じものにはならないが、徐々に未知の状態に対応できるようになる。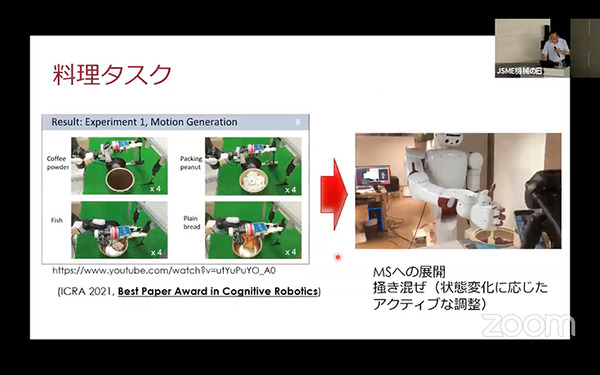
福祉・医療への応用、人との共存
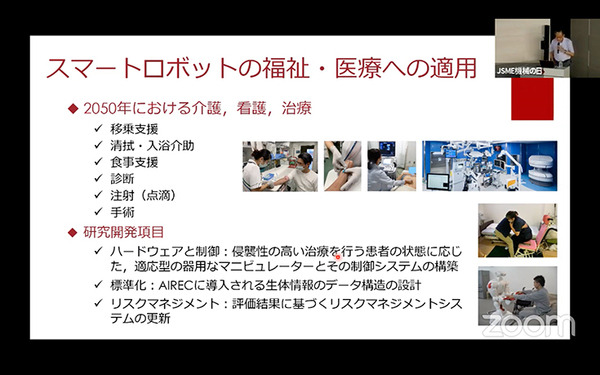
福祉・医療への応用も紹介された。介護、看護、治療にロボットを応用しようというのは今後の流れ であり、そこまで目指してロードマップを作ろうとしているという。最初は診断や移乗支援、そして清拭・入浴介助などへと進めようとしている。
現状変化を認識して道具を扱うロボットを作ることで福祉医療にも応用できると考えて、東京女子医大と共同研究を行なっている。今回は超音波診断をヒューマノイドロボットでやるという例が紹介された。道具をアタッチメントとして手先につけることで実際に診断ができるという。
■動画
最後に倫理的なところ法律的なところ、そして社会受容性がポイントだと述べ、まずはアンケートから質的・量的調査を行なっている段階だと紹介した。様々な国で調査をすると、ロボットの色はなぜ白なのか、本当にヒューマノイドでいいのかといった議論が出てくる。だが「今後の未来の世界を考えたらロボットに頼らざるを得ない。人口減少は先進国各国で深刻になる。そのために使えるロボットにしないといけない」と考えているとして、「スマートロボット」を実現するために様々なメンバーを集めてプロジェクトを進めているところだと講演を締めくくった。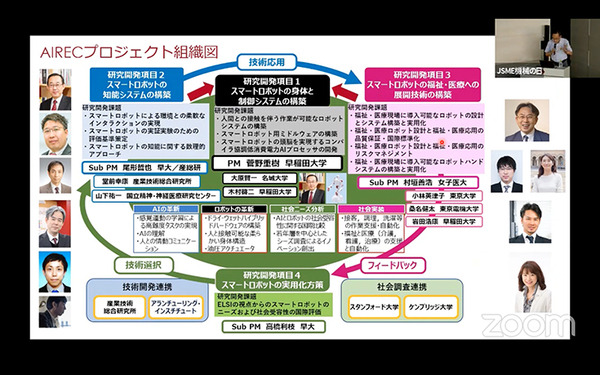
内閣府「ムーンショット」目標3 関連記事(森山和道):
・人と共進化するAIロボットとは? 内閣府「ムーンショット3」が目指すもの
・「サイエンス探求AIロボットプラットフォーム」とは ムーンショット3が目指す柔軟な知能を持ったロボット