





Thinkerの近接覚センサーとは
株式会社Thinker(シンカー)が2022年8月に創業された。共同創業者・代表取締役CEOは、アシストスーツを開発・販売していた元ATOUN代表取締役の藤本弘道氏。CTOは同じく元ATOUNの中野基輝氏。そこに大阪大学基礎工学研究科助教の小山佳祐氏が共同創業者・取締役として名前を連ねる。
Thinkerの武器は小山氏が研究開発を続けてきた「近接覚センサー」である。「近接覚」とは聞きなれないかもしれないが、見たり、直接触ったりすることなく対象物の距離や傾きを同時に、高速・高精度で計測する技術のことだ。カメラが遠距離、接触センサーが近距離だとすると、両者の中間の「中距離」のセンサーということになる。ただ中距離といってもだいぶ近く、対象物からの距離は2cm程度であることが多い。「近接センサー」と呼ばれることもあり、静電容量などいくつかの方式がある。小山氏が手がけるThinkerのセンサーは、赤外線を用いている。赤外線の反射から対象までの距離や角度を計測する。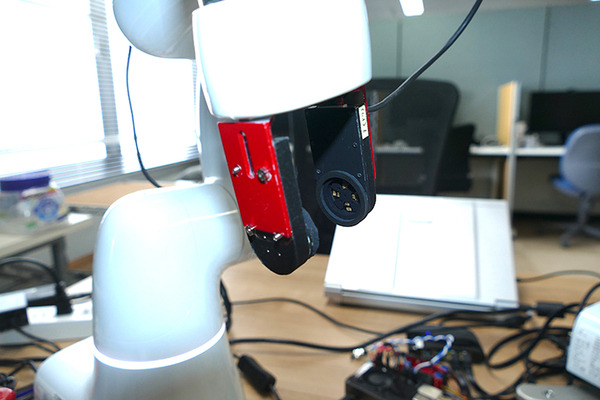
極論すればフォトリフレクタの信号をうまく利用しているだけとも言えるくらいシンプルな構造のセンサーだ。つまり安価に製造できるこのセンサーを使うことで、たとえばカメラなしでの臨機応変なバラ積みピッキングが可能になる。ビジュアルでは捉えづらい死角部分にも強い。また、キラキラした鏡面物体や透明物体に対しても強い点を売りとしている。
物体を近距離から高速で随時計測することから、ワークに対する微修正はロボットハンド側に任せることもできるようになる。つまりガチガチの位置制御をロボットに教え込む必要がなくなり、ティーチングが容易になる。人はラフなティーチングだけですむようになり、運用の負担やコストが下がる。多品種少量生産現場では必須の「段取り替え」も容易になるという。
■動画
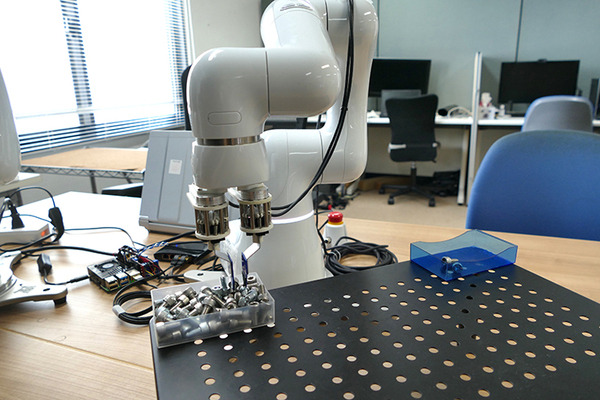
力センサーなしで「手探り」バラ積みピッキング

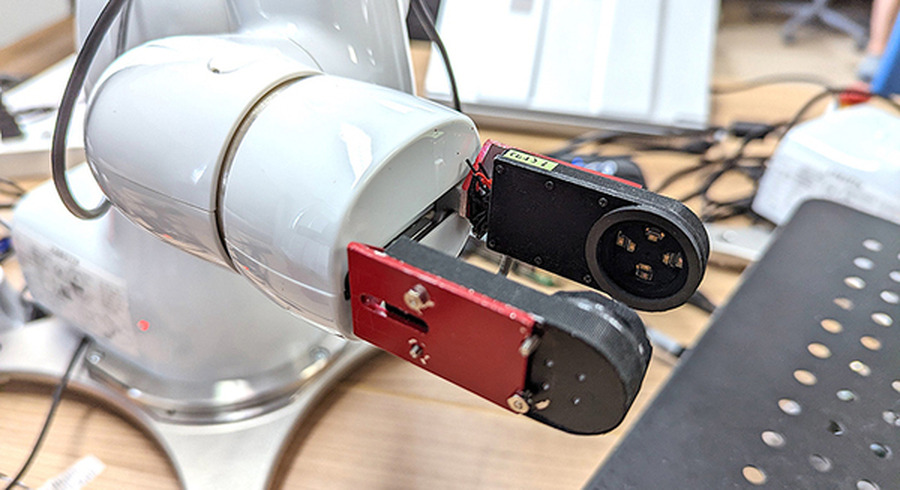
2022年9月に行われた「第40回日本ロボット学会学術講演会」では「高速・高精度近接覚センサとRCC機構を用いたビジョンセンサレスばら積みピッキング」として、組立て作業において位置や角度をならわせるために用いられることが多いばね機構の一種であるRCC(Remote Center Compliance)機構と近接覚センサを組み合わせることで、ネジのバラ積みピッキングをカメラなし、力覚センサーなどを使うことなく、いわば「手探り」で行う様子が紹介された。
ネジの山のなかに爪を入れることでネジに形がならい、一個ずつピックアップする。カメラも含む他のセンサーとも組み合わせることで、システム全体のローコスト化を狙っている。
■動画
同じ機構を使うことで様々な食品のピッキングもできるという。他にも、人間がやるように、机の上にある対象物を、机にある程度指を接触させながら、すくいあげるようにつかむような作業にも適用できるのではないかと考えているそうだ。ある程度、積極的に対象と接触させながらつかむ作業を、ロボットを壊したりしてしまうことなく実現できることから「協働ロボットを使いやすくすることにも貢献するのではないか」と小山氏らは語る。
■動画
小山氏は今回、前年度に行った発表「触覚機能を内包する高速・高精度近接覚センサ」をテーマとした研究発表により、「優秀研究・技術賞」を受賞した。
この技術の概要は以上だが、従来技術では難しいことをどのくらい克服できるのか、何に使えそうなのか。そしてビジネスにはなるのか。シーズを持つ小山氏の研究室がある大阪大学で実際のデモを見せてもらいながら、改めて話を伺った。
厳密な位置決めなしで透明な試験管もつかめる、赤外分光の可能性も
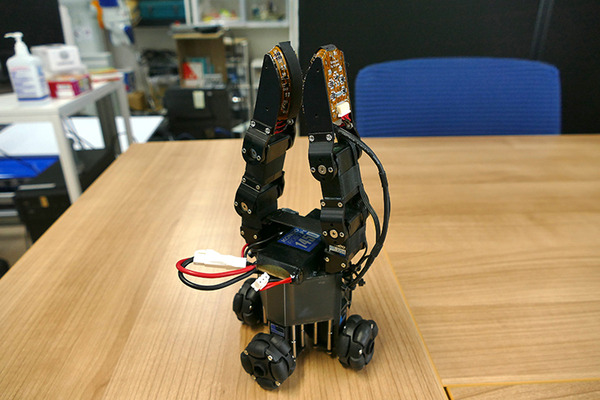
最初に見せてもらったのは旧世代のセンサーを使ったハンドと車輪のロボットだ。ハンドの手首に直接全方位移動できる車輪が4つくっついたユニークな形状のロボットで、上から手を差し込んで動かすと、手の動きについてくる。人間の掌との距離を検知して、動かした方向(手がなくなりそうな方向)、角度についてくるのだ。小山氏が2013年頃、発光素子と受光素子をどのような角度に配置するとセンサーとして適切な特性が得られるか、照明条件の影響などを検討するために、学生時代に作っていたものだという。
もちろん元々はロボットとハンドとアーム用だが、出張などの時にもデモをしやすいように車輪をつけたとのこと。実際にやらせてもらうと、妙な感覚で面白い。
■動画
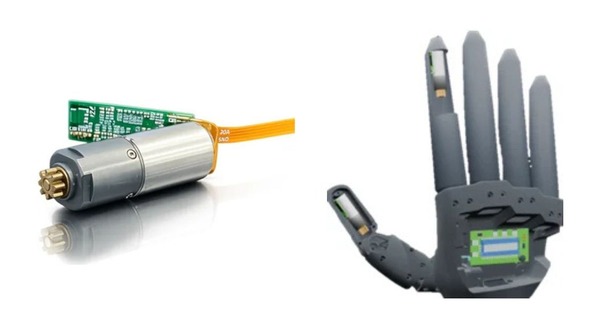
現在、最新試作の近接覚センサは約2cm×4cm。ロボットの指先にも入れられる親指くらいのサイズで、赤外線LEDが周囲に配置されている。よくある、一般的なフォトリフレクタである。この発光パターンを受光し、独自のアルゴリズムで解析することで、物体表面までの距離と傾き、角度を検出する。
■動画
鏡や、透明なアクリル板などに対しても同じ様に追従することができる。この機能を使って、たとえば実験に用いる試験管のようなものも掴める。
単に掴めるだけではない。試験管がグラグラするようなかたちでポンと置かれていても、それに合わせてロボットがついてくるのだ。動きが安定するとロボットがピッキングする。厳密に位置を合わせてティーチングする必要はない。実験や環境試験などをロボットが行う用途が増えているが、それらには今すぐにでも使えそうだ。
■動画
使われているのはフォトリフレクタなので、普通のフォトリフレクタとして使って試験管の有無を判断することもできるし、中の液体が全部出たかどうかも検出できる。試験管の表面を見たいのか、中の液体を見るかも切り替えて使える。「様々なセンサーを複数使うのではなく、一つのセンサーだけで様々な機能を合わせ持たせることができる、プログラマブルであるという点も、このThinkerの近接覚センサーの特徴」と Thinker CTOの中野氏は語る。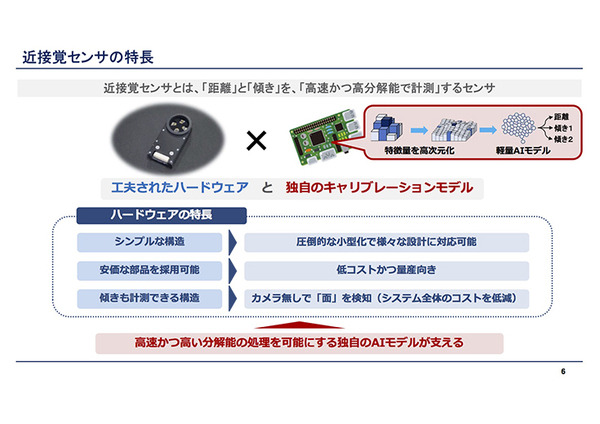
赤外線を使っていることを利用し、今後の展開としては「赤外分光のような測定もできるのではないか」とも考えているという。近接覚センサを使うことで、材質判定と距離・角度を同時に知ることができるというわけだ。
現在はあくまで検証用としての使い勝手のことも考えてセンサー部にはセンサーだけを配置。取得情報の解析、AI推論処理は外付けのRaspberry Piで行なっている。将来はFPGAなどに実装して一体化することも考えているという。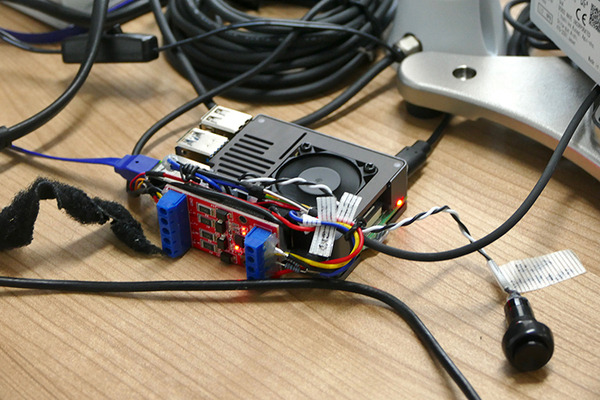
生センサデータを高次元空間に写像して学習モデルを作ることで精度を上げる
Thinkerの近接覚センサーは取得した特徴量を、独自のアルゴリズムとAIモデルで処理するとされている。詳細は知財の関係で公開されていないが、小山氏によれば基本的な考え方は以下のようなものだという。
「近接覚に機械学習モデルを適用する上では厄介な問題があります。センサーから得られる特徴量が少ないことです。カメラならば画素数の分、十分な特徴量が入ってきますが、近接覚の場合はせいぜい10個以下の特徴量しかありません。そのためニューラルネットワークを適用するには特徴量が少なすぎて、うまく学習できない問題があるのです。そこで、高次元の空間にセンサーの生値をうまく写像し、その高次元での特徴量をもとに学習モデルを作ると、多次元の情報量から学習モデルを作ることになるので、精度を上げやすいのです」。ここがオリジナルで、肝となる部分だ。
■動画
「目指す未来が合致した」メンバーで新たな事業を目指す

藤本氏によれば、8月12日の創業リリース後、すぐに問い合わせが来たという。しかも全て「サンプルを売ってくれ」というものだそうだ。ピンとくる人にはピンと来たということだろう。Thinkerでは2022年10月くらいからサンプル出荷を行う予定。これはあくまで機能評価用だが、翌年度にはより簡易な1ボード化まで持っていって製品版に近いものして、主に製造業向けに供給することを目指している。価格は未定。時期も若干不透明だという。
ちなみに社名のThinkerは「考え抜く集団」「考えるロボット」「ロボットの進化(シンカー)を加速させる」といった思いが込められている。小山氏は元々は東大・石川研究室の所属。以前から近接覚センサを大企業に製品化してもらえないかと考えていた。だがなかなか難しかった。そこで2019年10月に大阪大学に着任した時から「ベンチャーを起こすしかない」と考えており、2021年度には共創機構のベンチャー支援室から4000万円の資金を提供され、VCからもアドバイスを受けながら、一部のメーカーと現場の課題・ニーズを探りつつPoCを既に実行していた。そしてCEO候補を探し、藤本氏に出会い、今回の起業に至った。
CEOとなった元ATOUN(アトウン)の藤本氏とは以前から大阪大学共創機構を通じて、付き合い自体はあった。なおATOUNはパナソニックの社内ベンチャー制度によって2003年6月に設立された(当時の社名はアクティブリンク)企業で、奈良を拠点とし、主に外骨格型アシストスーツの開発と販売を手掛けていたが、2022年4月に解散した。解散の理由は新型コロナ禍によって営業が滞ったこと、コロナ後のV字回復は困難であると判断したことだという。なお藤本氏は2022年5月にはロボティクス事業に関わるコンサルティングや事業化支援を行うSHIN-JIGENも創業し、こちらのCEOにも就任している。
藤本氏は「どうなるかわからない技術だったので、過去の経験が活かせると思って引き受けた」と語る。開示してもらったPoCの結果などを見て「これはわかりやすい技術ではない。まだ用途開発しないといけない。本当にゼロイチ。だから面白そうだなと思った」。そしてATOUNを精算した5月以降、一気に動いてチームをまとめ再構築した。一番苦労したのは大学の先生である小山氏に取締役になってもらうための事務手続きだったと笑う。
小山氏が藤本氏ら元ATOUNメンバーと一緒にやりたいと決めた理由は、相性と、「目指す未来が合致したこと」だという。「経営者によって、このセンサーをどう活用するかは考え方が違ってくるんです。本当にゼロイチなので、アイデアベースで色んなものが出てきました」(小山氏)。
実際、創業後に来た連絡のなかにも、共同研究の側面が強いものと事業化の側面が強いものの2種類があり、前者については大学での研究として進め、後者についてはThinkerの事業として進めていく予定だという。そのほか、ATOUNがもともとパナソニックの子会社としてものづくりを体験したベンチャーであったことから、「タッグを組むことで、パナソニック基準でのモノづくりでゼロイチ起業ができるのではないか」と考えられたこと、つまり信頼性の高さも後押しとなった。この点について藤本氏は「パナソニックが我々を育ててくれた側面には感謝しかない」と語った。
なお資金についてはパナソニックは今回は無関係。現在は4人が出資者となって事業を進めているが、今後事業を回すためにシードラウンドをまとめているところ。大阪大学ベンチャーキャピタル株式会社(OUVC)等も含めて複数のVCとやりとりしており、まもなくクローズする予定とのことだ。
用途は半導体ウェハーの搬送、協働ロボットの高度化、ローコストなピック&プレイスなど

Thinkerの近接覚センサー鏡面や透明物体に強いという点がリリースでは打ち出されてる。だが実際には、他にもそれらを扱うための技術ややり方は存在する。具体的にThinkerに来ている案件はどんなものがあるのだろうか。まだ創業からわずか一ヶ月だが、可能性は見えてきているという。やはり課題は現場にある。小山氏は「古くからロボット活用が進められていて、もう再開発の余地はないのではないかと思われるような業界でも色々な課題があり、その辺の用途に使えそうな引き合いが来ている」という。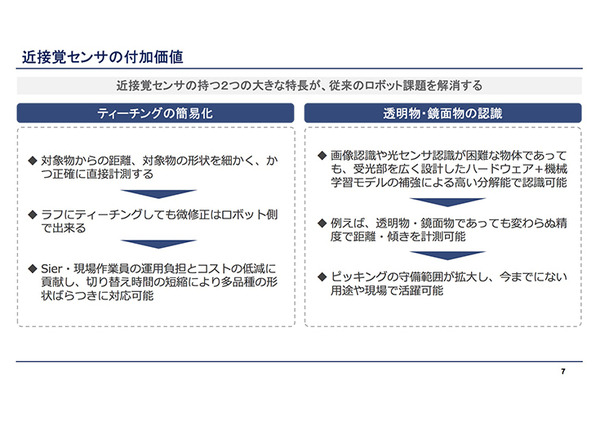
大事な点は、近接覚は対象のすぐ近くで計測を行うセンサーだというところだ。「表面が読めるセンサーはたくさんあるけれど、多くは遠い距離から読むのが基本。でもロボットで使う場合は、手先とセンサーの位置関係を事前に詳しく調べておかないと座標変換ができない。つまり直接の位置関係をしっかり決めるか推定しないといけない。近接覚センサーを指に付けられれば、直接、姿勢調整ができるので『搭載すればすぐに使える』ところに持っていけるのではないか。鏡面、透明が読めるセンサーは確かに他にもありますが、近距離を正しく高速に計測できるセンサーはなかなかないんじゃないか」(小山氏)。手先位置を基準にして追従するような動きが簡単に作れる点は大きく、ティーチングを容易にしたり、表面近くを沿って動きながら表面検査するといったニーズはあるだろうと語る。
また、半導体のウェハーの搬送への適用なども現場の話を聞くと意外とありそうだという。こちらについてはCTOの中野氏が、現状から解説してくれた。「ウェハー搬送のティーチングは素人と玄人でレベルが違うんですね。非常に狭いクリーンルームの中でウェハーに対して薄いフォークを入れて持ち上げているわけですが、非常に狭くロボットが動くだけの場所です。でも一年に一回か2回、微調整するんですね。それがしっかりできてないと、ウェハーを取り落としたり、ケースに擦ってしまってパーティクルが出て、ロット全体が廃棄になったり、クリーンルームの洗浄からやり直すことになります。もちろん高額なセンサーや位置極め治具を使うといった既存技術は存在しますが、玄人は位置極め治具との相対距離は感覚で理解していて、それは目視でやってるんですね」。
もちろん半導体の向上にも色々なレベルがあって高付加価値のウェハーを製造しているハイエンドなところはそうではないが、価格を下げなければいけないとこでは、熟練が目視と、ウェハとロボットがぶつかる「音」を聞きながら、0.1mm以下の精度を調整しているのだという。属人的な技術なのだ。それを、ロボットの先にも容易に付けられる近接覚センサーによって数値化できれば、玄人の技を数字で明らかにできる。そういった期待があるという。
また、アームメーカーからも興味を持たれている。人と空間を共有する協働ロボットはぶつかったら止まる。だがぶつかったあとでは手遅れなので、ぶつかる前に止めたい。多くは環境側に設置したレーザーによるエリアセンサーなど、いわゆるセーフティカーテンなどを使っているが、そこに、非接触センサーの一種である近接覚も使えるのではないかというわけだ。
また、触覚センサーや力覚センサーと違って、ぶつけなくてもいいので、柔軟物や組み立て作業に扱えるのではないかという。前述のとおり価格は未定なのだが、3Dデプスカメラ等よりは安くなることは間違いないので、「指探り」ができるような機能をつけることもできるのではないかという。
たとえばピック&プレイスのときに、箱の隅っこのものを掴むためには色々な工夫があるが、Thinkerの近接覚センサーを使えば箱の側面をなぞりながら指でこそぎ落とすような動作が容易に行えるので、CADデータを使ったり行動計画を立てたりするやり方に比べると、計算量を大幅に下げられる。「真面目にやっていたものをハードルをさげてやることができる。システム全体の価格を下げられるのではないか」と中野氏は語る。
なお今後は、カメラと近接覚センサーを組み合わせたバラ積みピッキングや透明物体の把持などの実証実験なども行なっていく予定だ。センサーにはそれぞれのメリットがあり、Thinkerでも近接覚センサーだけしか使わないというわけではない。あくまで、既存のセンサーが取得しているデータの一部を、より安いコストで取れるようになるというわけだ。
製造業以外にも、食品業界なども面白そうな分野ではある。藤本氏は「事業としては食品分野はやりたくない。だが、大学での研究としてはやってほしい」と苦笑いする。研究のデモンストレーションとしては良く、他の分野の人にもイメージしてもらいやすい。しかし事業に結びつくかは怪しいという見立てだ。できれば10月以降に出荷予定の有償の機能サンプルを使って、大学等でやってもらいたいという。
ロボットをより生物っぽくする方向にも使える技術
CTOの中野氏は、センサーとしての活用だけではなく、AI技術の部分と、「フィジカルに進出できるところが面白い」と考えているという。今回のロボット学会で発表されたネジのピックアップのように「近接覚センサーと柔軟な機構と組み合わせることで計算コストを下げることができる。人間や生き物も、ならい制御みたいなものを積極的に活用していて、そこまで厳密に計算してないですよね。前職でパワードスーツをやっていたこともあって、一般のロボティクスの厳密さは、人間-機械協調システムではあまり良い方向ではないと感じていました。ですからそれがロボットにも応用できることが結構な衝撃だったんです。まだまだ産業用も出ていないですが、フィジカルに進出できるというところが非常に面白い。そちらを攻めていきたいです」。
■動画
小山氏も「ソフトロボットとは相性が良いのではないか」と語る。「柔らかく変形したときに、変形を近接覚でフィードバックする。そうすると、さらに生き物らしい動きができたりするかもしれません」。
藤本氏は、同様に自身がCEOだがThinkerとは別会社である「SHIN-JIGEN」の事業にも近接覚センサーやAI技術を活用できるのではないかと考えている。SHIN-JIGENは2022年9月に椿本チエインとヒューマンアシスト事業を始めることをリリースしている。アシストスーツは人の動作意図を取得することに苦労している。それがもし、特徴量が少ないことに起因するのであれば、小山氏のAI技術を使って、取得した情報を一度高次元にマッピングすることで解像度を上げれば「見えてくるものがあるかもしれない」という。
藤本氏は、事業になりそうなものはThinkerで、すぐに応用できそうにないものは大学で、と考えつつも、小山氏には「突き抜けた研究を期待している」という。「そのほうがThinkerサイドとしてはやりがいがあるし、やりやすい」という。「下手に市場に迎合する研究をされてしまうと研究のレベルが下がるし、新しい可能性を見逃す可能性もある。事業をしている人間は心が弱いので、『楽やな』と思ったらそっちへ流れてしまう。でも研究は論理的。論理性を見て可能性があるなら、難しいお題を我々に提供してほしい。私自身も難しいほうがモチベーションが上がる」と語る。
中野氏は「前職でのパワードスーツは、いわば人をロボット化していく方向で考えていた。今回はロボットを人っぽく、生物っぽくしていくアプローチ。やっていけば、この二つがカチ合う瞬間があると思うんですね。その結合点を自分の手で作ってみたいなと思ってます」と語った。
まずはサンプルが販売開始されたあとの広がりを期待している。
小山佳祐氏 公式サイト