注文の翌日に届く荷物や車両の受注デリバリー、新鮮な有機農産物、これらの現代特有の迅速な配達による利便性は、移動ロボットにより今後、更に加速していくと予想されている。
NVIDIAは、2022年9月20日(アメリカ太平洋時間)に、自律走行搬送ロボット(AMR)リファレンスプラットフォーム「Nova Orin」のアップデートを発表した。また、3つのリファレンスプラットフォーム構成の詳細を公開した。
今回公開したうちの2つは、単一の「Jetson AGX Orin」を搭載し、1つは2基のOrinモジュールを搭載するものだ。「Jetson AGX Orin」は、NVIDIA Isaacロボティクス スタックとロボットオペレーティングシステム(ROS)をGPUアクセラレーテッドフレームワークで実行する。
「Nova Orin プラットフォーム」とは
「Nova Orin プラットフォーム」は、信頼性を向上させ、世界中で自律走行搬送ロボット(AMR)を構築、および展開するための開発コストを削減するように設計されたもの。AMRは自動運転車に似ているが、公道とは異なり、物流倉庫や工場など、通路はあるもののコースやルートが構造化されていない環境向けだ。
事前にプログラムされた固定の軌道を必要とせず、障害物を回避することができるため、AMRは倉庫や流通センター、工場での物品の移動または接客、清掃、警備巡回、ラストマイル配送の用途に最適なロジスティクスといえる。何年もの間、AMRメーカーは、コンピューティング ハードウェア、ソフトウェア、およびセンサーを社内で調達および統合し、ロボットを設計してきた。この時間を要する作業には、何年にもわたるエンジニアリングリソースが必要であり、市場投入パイプラインが長くなり、ドメイン固有のアプリケーションの開発がおろそかになりがちだった。
NVIDIAは「Nova Orin」がセンサー、ソフトウェア、および GPUコンピューティング機能をテスト済みの産業グレードの構成で提供することで、この課題の解決に貢献する、と述べており、NVIDIA AIプラットフォームを活用することで、開発者はロボット・アプリケーションの独自のソフトウェア・スタックの構築に専念できるとしている。
なお、業界全体でAMRによって可能になるイントラロジスティクスには、多くの期待がかかっており、ABI Researchの推定(2019年12月10日当時)によると、2021年は80億ドルであるこの市場は、2030年までに6倍近くに増加し、460億ドルになると予想されている。
高機能で柔軟なリファレンスアーキテクチャの設計
Nova Orinリファレンスアーキテクチャデザインは、特定のユースケース向けに提供されている。ひとつは、安全性の認証を受けたセンサーを搭載していない Orinベースの設計、2つ目のリファレンスは、安全性が認証されたセンサーと、安全プログラマブル ロジック コントローラーを搭載した設計だ。3つ目のリファレンスは、機能安全を実現するためにビジョン AI を活用する、2基のOrinベースのアーキテクチャとなっている。
・ROSベースのロボットアプリケーションと簡単に統合
センサーのサポートには、ステレオカメラ、LiDAR、超音波センサー、慣性計測ユニットを含んでおり、対応のセンサーは、産業用アプリケーションのパフォーマンスと価格、信頼性のバランスを取るように選ばれている。このセンサー群は、安全で協調的なAMRの開発と展開に必要なマルチモーダルな多様性を提供する。
・カメラとセンサーとの高度な連携
ステレオカメラと魚眼カメラは、NVIDIAがカメラパートナーと協力してカスタム設計したものだ。すべてのセンサーは校正され、時刻が同期されており、信頼性の高いデータ収集のためのドライバが付属している。これらのセンサーにより、AMRはさまざまな状況で物体や障害物を検出できると同時に、位置推定とマッピングの同時実行(SLAM)も可能となる。
・2D及び3D LiDARのサポート
また、機能安全の認証を受けたセンサーの有無に応じた2種類のアプリケーション用を用意しており、これらの2D LiDARに加え、「Nova Orin」はマッピングとグラウンド トゥルース データ(AIモデルの出力の学習やテストに使用される実際のデータ)収集のために3D LiDARをサポートしている。
OEM、ISV 向けの包括的なAIプラットフォームの構築
NVIDIAは、ハードウェアと統合ツールに加えて、広範なソフトウェア サポートによって「Nova Orin」プラットフォームを前進させている。
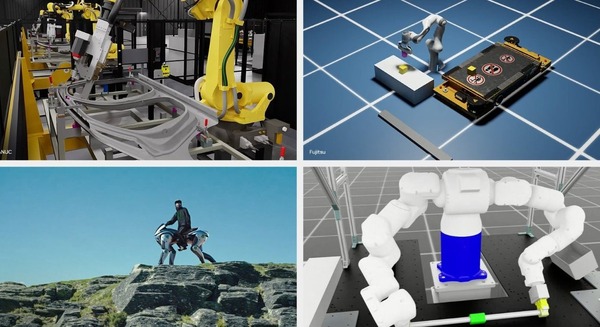
・ベースOSには、すべてのハードウェアおよび適応ツール用のドライバとファームウェア、およびロボットと統合するための設計ガイドが含まれており、ROSベースのロボットアプリケーションと簡単に統合できる。また、センサーには Isaac Sim で検証済みのモデルが含まれており、実際のロボットを必要とせずに、アプリケーションの開発とテストが行える。
・モデルのトレーニング、デバッグ、および分析に必要な膨大な量のセンサーデータのデータパイプラインを設定するという骨の折れる作業は、クラウドネイティブのデータ取得ツールにより不要となる。Novaセンサー用に開発された最先端の GEM は、Jetson Orin プラットフォームで GPU アクセラレーションされ、ビジュアルSLAM、ステレオ深度推定、障害物検出、3D 再構成、セマンティック セグメンテーション、姿勢推定などの主要な構成要素を提供する。
・また、Nova Orin は、屋内環境向けに、忠実度の高い都市規模の 3D マップをクラウド上で迅速に作成する必要性にも対応しています。これらの生成されたマップにより、ロボットのナビゲーション、フリート計画、およびシミュレーションが可能になる。さらに、ロボットから得られるデータを使用して、マップを継続的に更新可能だ。
産業に対応可能なAMR、AMRのさらなるコスト削減と信頼性の向上
ロボティクス システムが進化するにつれて、搭載された重要なAIソフトウェアの安全な展開と管理の必要性は、将来のAMRにとって最も重要だ。
「Nova Orin」は、OTAによる安全なリモート更新と、デバイスの管理と監視をサポートするとともに、展開を容易にしメンテナンスのコストを削減する。そのオープンなモジュラー設計により、開発者はプラットフォームの一部またはすべての機能を使用および拡張し、ロボティクス アプリケーションを迅速に開発できる。
NVIDIAは規制機関と緊密に協力して、ビジョン対応の安全技術を開発し、AMRのさらなるコスト削減と信頼性の向上に取り組んでおり、開発者がアプリケーションを迅速に開発できるように、ナビゲーション用のソフトウェア開発キットも提供している。自律型マシンのプロダクトマネジメントディレクターであるAmit Goel氏は、工場や倉庫の生産性の向上は、いかに安全かつ効率的に、AMRを大規模に展開し、協力して機能させられるかにかかっており、「Nova Orin」の3D認識によってもたらされる高度な自律性は、その革命を推進するのに役立つだろうと述べている。
NVIDIA 関連記事(ロボスタ)
NVIDIA