経済産業省と一般社団法人日本機械工業連合会は、総務省、文部科学省、厚生労働省、農林水産省、国土交通省との共催により「第10回ロボット大賞」を実施し、各賞の受賞ロボット等が決定したことを発表した。
受賞したロボットは10月19日(水曜日)より開催する「Japan Robot Week 2022」(主催:一般社団法人日本ロボット工業会、株式会社日刊工業新聞社)の会場内において、表彰式と展示が行われる。
今後の活躍が期待されるロボット等を表彰・展示する「ロボット大賞」
「ロボット大賞」は日本のロボット技術の発展や社会実装を促進することを目的として、ロボットの先進的な活用や研究開発、人材育成といった様々な分野において、優れた取組を実施した企業等を表彰する制度。2006年度に第1回を開催し、2008年度からは隔年での開催を続け、今回が10回目の開催となる。
「第10回ロボット大賞」は2022年4月11日から6月3日までの募集期間に寄せられた全112件の応募の中から、第10回ロボット大賞審査特別委員会等の審査により、各賞の表彰対象を決定した。
経済産業大臣賞

人や障害物を回避しながら走行し続けられる安全性を確保した自動運転機能を持ち、運行管理ソフトウェアにより最大100台までの一括管理が可能。工場レイアウトのCADデータ作成などを必要とせず、導入ルートを走ることで周囲環境をスキャンし、走行用のマップが自動生成される。また、ロボットに不慣れなユーザーでも簡単に搬送を指示できる使いやすさも備える。搬送・配達・周回といった単純作業をモバイルロボットが担うことで、人はより付加価値の高い作業に専念できる。
多数のAMR(Autonomous Mobile Robot, 自律走行搬送ロボット)プラットフォームとして完成度が高い。個々の技術(SLAM(自己位置推定と環境地図作成を同時に行う技術)、障害物回避など)を組み合わせ、実用的なシステムを実現している。すでに40か国3,000台を超える実績もあり、生産現場の生産性向上にも大きく貢献している。SIerとの連携により、今後様々な分野への適用が期待できる搬送プラットフォーム。
詳細(PDF)
総務大臣賞

水空合体ドローンは空中ドローンと水中ドローンが合体し、モバイル通信による遠隔操作で、空を飛び水に潜ることができる世界初のドローン。音響測位装置により、衛星利用測位システム(GPS)が使えない水中でも位置情報が分かるため、これまで船を出しダイバーが行っていた水中の監視・撮影を、船を出さずに陸からより手軽に水中の監視・撮影ができるようになる。
GPSと水中測位技術を組み合わせることにより、水中での点検位置を精度高く得ることができる。空中ドローンと水中ドローンを繋いで全体として信頼性の高い通信システムを開発したところを評価。ケーブル、通信距離、水中音響測位、空中ドローン、水中ドローンの性能を活かして事業化すれば、大きな社会的インパクトが期待される。
詳細(PDF)
文部科学大臣賞

toioのロボット「キューブ」は専用マットに印刷された特殊パターンを光学センサーで検知することで絶対位置の検出が可能。また、6軸検出システムにより三次元的な姿勢・動きの検出も行う。「つくって、あそんで、ひらめいて」を育む小型のロボットとして、一般ユーザーの利用だけでなく、学校やアフタースクールにおけるプログラミング教材、探求学習用教材として採用されている。
プログラミングは、MITメディアラボで開発されたビジュアルプログラミング言語Scratchに準拠しており、ブロックをつなげていくだけでプログラミングが可能。プログラミング初心者から、高度なプログラミングの学習までに対応するように設計されており、利用範囲は広い。オープンソースとして内部仕様を公開しているため、サードパーティーによるアプリ開発等も進んでいる点も評価。
詳細(PDF)
厚生労働大臣賞

腹腔鏡手術を支援するロボットシステム。患者の腹壁に開けられた複数の直径数mmのポートと呼ばれる穴から、ロボットに装着された鉗子や電気メス等の手術器具や内視鏡カメラを挿入することで、執刀医は3D映像を見ながら自らの手を体腔内で動かしているような感覚で手術操作が可能であり、患者への負担の少ない低侵襲手術が可能。
米国製ロボットの寡占状態となっている手術支援ロボットの分野において、国内で開発された期待が持てるロボットシステム。国内外の医師の意見を取り入れ、コックピットを含めた装置全体が小型化され、操作性にも優れている。既に国内の病院では数十台が稼働し、今後は国内外での導入拡大に期待ができる。
詳細(PDF)
農林水産大臣賞
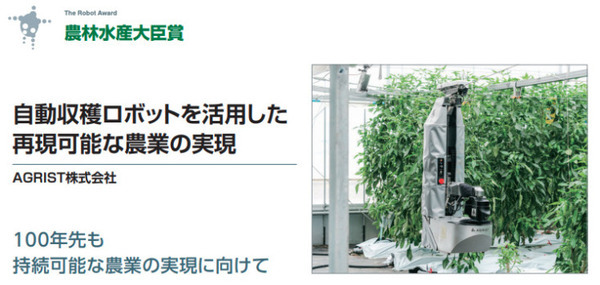
施設園芸における画像解析による収穫適否の判断と自動収穫ができるロボットの開発により、労働力を補い、また、データ収集を行う。ビニールハウスの畝間の地面は剪定した枝葉やかん水パイプ等、ロボットが地上を走行する障害に対応するため、ハウス内に設置したワイヤ上をロープウェイのような形で移動。ピーマン収穫のための独自のハンドも開発した。
地面を走行する収穫ロボットはあったが、吊下げ式にすることでハウスに落ちている枝葉やかん水パイプ等の地面の状態に影響を受けずに移動や収穫が可能。
ビニールハウス内の野菜の収穫の自動化は、日本にとどまらず世界的に関心の高い技術である。 導入費用が3年間のレンタル料150万円にロボットが収穫したピーマンの出荷額の10%が手数料となる料金モデルであり、自動収穫ロボットにあった仕立て方や栽培方法についてもセットで開発しており、収穫の自動化にとどまらない栽培のスマート化に発展させる点など、普及に向けたビジネスモデルの提案を評価。
詳細(PDF)
国土交通大臣賞
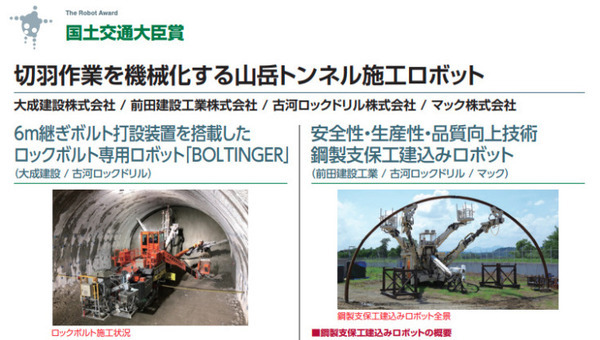
山岳トンネル工事では、削孔・装薬、発破、ズリ出し、支保工建込、吹付、ロックボルトの一連作業を繰り返しながら掘削作業が行われる。作業時の切羽肌落ち災害が最も発生しやすい労働災害であり、切羽立ち入りの必要な支保工建込み作業、ロックボルトの挿入作業をそれぞれロボットで自動化することにより、省人化・生産性向上だけでなく、災害の撲滅を目指している。
これまで労働災害の大きな割合を占め危険な過酷作業であった切羽近傍での支保工建込み・ロックボルト打設作業の完全機械化を実現。山岳トンネルそのものは道路や鉄道などを通して広く国民が恩恵を受けているインフラであり、そこで人知れず行なわれている重労働を軽減する「山岳トンネル施工ロボット」として、建設土木業界の発展に貢献する点を評価。
詳細(PDF)
中小・ベンチャー企業賞(中小企業庁長官賞)

食品産業の中でも生産性が低く、自動化が進んでいない、惣菜業界の盛り付け工程をサポートするロボットシステム。ポテトサラダのような不定形な食材を決められた重量を計測して掴み、製品トレーに盛り付ける工程を4台で1時間1,000食という一般的な食品工場で求められるスピードに対応して自動化。マグネット式のハンドを取り替えることで1台でも種類の異なる惣菜や、異なるサイズのトレーに盛り付けることが可能。
画像を使わず、力センサとロボット(スカラー型の4軸)の動きのみで、不定形の食材の盛り付けを実現している点を評価。また、ロボット専門家のいない現場での使いやすさを考慮し、ハンド手先の脱着をマグネットにしたり、手先を覆うフィルムにも試行錯誤を行っている。食品産業でニーズが高い工程を対象としており、優れた技術を有しているため、今後の普及に期待ができる。
詳細(PDF)
日本機械工業連合会会長賞

ロボット配送ソリューションの社会実装に向けて、公道走行対応の自動配送ロボットと、複数ロボットを遠隔から監視・操作する遠隔管制システムを開発。住宅街を実証の場として、パナソニック ホールディングスとFujisawa SSTマネジメントと地域住民/店舗とが一体となって、ロボット配送サービスの社会実証を進めながら、住宅街で人と共存する公道走行、遠隔監視操作者1名で4台同時走行、フルリモート型公道走行を実現した。
ロボット配送サービスに対して、顧客が対価を支払うサービスインを実現している。対価を支払う顧客がいることにより、実用的な課題の抽出・技術的な検討が進み、サービス仕様が継続的に改良されるサイクルが回っていることや、事業拡大のための新たな対象市場の可能性や競争優位を持つコアプロダクトがあることも評価。また、遠隔管制システムを自動配送ロボットと組み合わせることにより、ロボットモビリティの公道走行に関する法改正にもつながっており、ロボット活用の範囲を大きく広げている。
詳細(PDF)
日本機械工業連合会会長賞

高速な3Dスキャンと認識技術によって、従来のセンサーでは認識が困難だった線状物(電線、多芯ケーブル、ケーブル束、フラットケーブル、コネクタなど)を見たままに認識できる、ロボット用センシングデバイス。ケーブル認識用の高速3Dビジョンは、人間のように瞬時に形状を認識するデバイスであり、従来にない高速高精度の3Dスキャンを実現。
社内で培ってきた画像処理技術をベースにし、ケーブルなどを認識することに特化した高速ステレオ処理のセンサを開発し、センサを組み込んだロボットシステムの販売事業を展開している点を高く評価する。ハンドやシステムの構築において、事業に必要となる技術の開発とロボットメーカとの協業を組み合わせるなど、新しい技術の普及に対する体制作りも評価できる。
詳細(PDF)
優秀賞(社会インフラ・災害対応・消防分野)
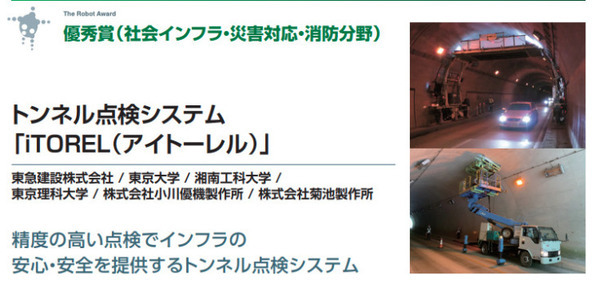
人による近接目視と打音検査の点検業務をロボット技術によって代替する事を目指したシステム。トンネルの覆工コンクリートのひび割れと浮きを自動検出する点検ユニットを搭載し、トンネルの条件によってガントリーフレーム型や点検用アームを搭載した高所作業車型を使い分ける。複数の点検ユニットを覆工コンクリートに沿わせて点検するため、作業時間の短縮や省力化を実現できるとともに、メンテナンスサイクルを構築するうえで重要なひび割れ、浮きなどの位置や形状を高精度に取得可能。
インフラ作業の自動化は高度成長期に作られた多数のインフラの老朽化に伴う点検作業の増大から急務となっている。打音検査ユニットとラインセンサによる高精度ひび割れ検出システムは、実用的なものが開発されており活用の期待が大きい。また、一般道の検査には従来の検査用車両を改造して取り付けており、実用的なシステムとして期待される。
詳細(PDF)
優秀賞(ICT利活用分野)
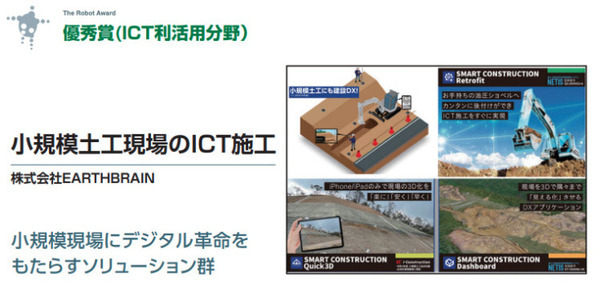
SMART CONSTRUCTIONは、施工会社が現場で行う建設生産プロセス全体をデジタルデータでつなぐことにより、大幅に省力化・精緻化し、デジタルトランスフォーメーションを建設現場で実現する点で画期的なソリューション。国内でICT施工が本格普及するための有効なツールとなる。
土木建設業の大半を占める小規模事業者はIT化が大幅に遅れている。本製品・サービスは小規模施工現場の統合的なアプローチによるICT化を実現し、生産性を高めることが可能となる。直接的な競合製品・サービスもなく、従来の製品に対しては高いコストパフォーマンスを実現できることから、これまでの実績に加え、小規模事業者などへの導入拡大が期待される。
詳細(PDF)
優秀賞(ビジネス・社会実装部門)
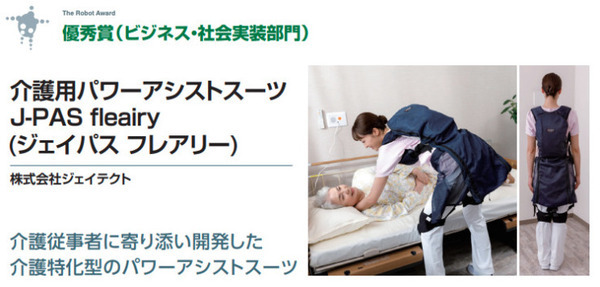
介護作業での腰の負担を軽減する為に、介護作業時に着用するパワーアシストスーツ。軽量かつ、簡単脱着のほか、使用場面に応じて手元ボタン操作で最適なモードを選択可能(通常アシスト、立位保持アシスト、フリー動作モード)。既に40以上の施設に導入されており、介護従事者のロボット使用へのハードルを取り払う 「人とロボットの距離を縮める」製品となる。
今までのアシストスーツの多くが外骨格タイプであるが、介護に特化というコンセプトに準じて、「内骨格タイプ+アクティブアシスト」を採用し、柔らかい素材による衣服型を追究している。介護系の大学や介護就職展示会の場を活用して、本機を活用した腰痛予防、移乗技術の教育、普及活動も自ら行っており、社会実装への取り組みを評価。
詳細(PDF)
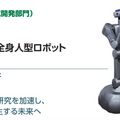
優秀賞(研究開発部門)
工場から倉庫、店舗、オフィス、家庭に至る自動化の流れを加速するために開発された先端的な力制御ロボット。人間と同等のサイズで人間と同様の関節構成を持ち、腕と腰で力制御が可能。次世代のロボット(自動化手段)の研究開発用 という位置付けで、深層学習などの AI を搭載した自律知能ロボットやテレプレゼンスロボットの研究に活用されている。
組み込み型モータ、減速機、トルクセンサと、それに基づく上半身全身の力制御、様々なインピーダンス制御機能を備え、物理的な接触を伴う作業に関する研究開発用の優れた新規プラットフォームである。研究開発用プラットフォームだけでなく、産業用の技術としてのポテンシャルも認められ、ロボット利活用の推進に寄与することが期待される。
詳細(PDF)
記念特別賞

第1回(2006年)ロボット大賞のサービスロボット部門で優秀賞を受賞。一般家庭でのペット代替や医療福祉施設におけるセラピーを目的とするロボット。全身を覆う面触覚センサなど多種多様なセンサ、静穏型アクチュエータによる滑らかな動作、人工知能による自律行動、名前や行動の学習機能を有している。
少子高齢化の影響により人手不足が深刻化するなか、認知症高齢者の増加は世界共通の課題でもある。2002年、世界で初めてロボット技術を活用してセラピー効果が認められたパロは、日本が誇れる介護ロボットであり、かつ国際的にも評価されている。また、製造はすべて日本国内で手作りされ、20年にわたり多くの国々で利用されていることも評価された。
詳細(PDF)
記念特別賞

第1回(2006年)ロボット大賞の中小企業・ベンチャー部門で優秀賞を受賞。サービスロボットや自動搬送ロボットなど、自律移動が可能なロボットの目となるセンサ。光によって対象物の位置・大きさ・移動方向の判断が可能となり、衝突を避けて通行可能な経路を見つけ出す。ロボットに必要な小型、軽量、省電力を実現した。
第1回受賞後から後継機種が発売され、現在までに40万台を超える実績を持つ。当初は移動ロボットを想定して発売されたが、その後すそ野が広がり、次世代知能ロボットやAMR(Autonomous Mobile Robot, 自律走行搬送ロボット)など様々なロボットに搭載されている。ロボットの活用分野を大きく広げ、業界の発展に寄与したことが評価された。
詳細(PDF)
表彰式および合同展示
第10回ロボット大賞の表彰式および合同展示は、「Japan Robot Week 2022」(令和4年10月19日(水曜日)~21日(金曜日)、東京ビッグサイト(東京都江東区有明3-11-1)西3・4ホール)の会場内において、以下のとおり行う。
日時:令和4年10月19日(水曜日)10時30分から12時00分
場所:東京ビッグサイト 西4ホール内 メインステージ
【受賞ロボット等の合同展示】
日時:令和4年10月19日(水曜日)~21日(金曜日)10時00分~17時00分
場所:東京ビッグサイト 西3ホール「Japan Robot Week2022」内「第10回ロボット大賞」合同展示ブース(小間番号J-01)
(参考)
Japan Robot Week 2022
日時:令和4年10月19日(水曜日)から21日(金曜日)10時00分から17時00分
場所:東京ビッグサイト 西3・4ホール
主催:一般社団法人日本ロボット工業会、日刊工業新聞社