


NVIDIAはROSCon 2022においてNVIDIA Isaac ROSの最新のソフトウェアリリースであるDeveloper Preview(DP) 2を発表した。このリリースには自律走行搬送ロボット(AMR)向けの新しいソフトウェアが含まれ、クラウドやエッジからのロボットへのタスク管理およびモニタリングを可能にする。また、リリースにはROS 2開発者向けの他の付加的な機能も含まれている。
Isaac ROSはハードウェアアクセラレーション機能を実現するための独立したパッケージ(GEM)と包括的なパイプライン(NITROS)で構成されている。新しいリリースでは性能が向上しただけでなく、以下のような機能も追加されている。
フリート管理システムからロボットにタスクを割り当て、そのタスクの進捗状況を監視するためのオープンソースのCPUパッケージ。Mission Dispatchは大規模なフリート管理システムに組み込むことのできる、クラウドネイティブのマイクロサービス。
フリースペースのセグメンテーション
ロボット周辺において、ナビゲーションスタックへのインプットとして使用されるビジョンAIを活用した占有グリッドを生成するためのハードウェアアクセラレーションパッケージ。
H.264 動画のエンコードとデコード
圧縮された動画データを録画および再生するためのハードウェアアクセラレーションパッケージ。動画データの収集はAIの認識モデルのトレーニングに欠かせない。NVIDIA Jetson AGX Orinに実装されている、これらの新しいGEMの性能により、2台の1080pのステレオカメラで30fps(合計120fps以上)で測定した場合のデータフットプリントをおよそ10分の 1に減らすことができる。
Mission DispatchとClientについて
Mission DispatchとClientにより、標準的かつオープンソースの方法で、フリート管理システムとROS 2ロボットとのあいだでタスクの割り当てと追跡ができるようになる。DispatchとClientはロボットフリートを想定して設計された通信のオープンスタンダードである「VDA5050」を使って通信を行う。メッセージはモノのインターネット(IoT)アプリケーション用の軽量のメッセージングプロトコルである「MQTT」を使って無線伝送される。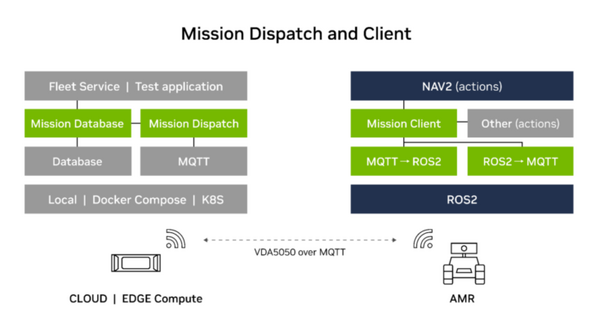
Mission Dispatchはコンテナ化されたマイクロサービスで、NGCからダウンロードすることができる。また、Isaac GitHub上でソースコードとしても利用可能で、フリート管理システムに組み込むこともできる。Mission DispatchはOTTO MotorsとInOrbitが開発し、先頃発表されたVDA5050コネクタのような他のオープンソースのROS 2クライアントとの相互運用も確認されている。
Mission ClientはROS 2 Humbleとの互換性があり、Isaac ROS GitHubでパッケージとして入手することができる。また、ロボットのナビゲーションおよび他のタスクの割り当ておよび追跡を行うNav2ナビゲーションスタックに事前に組み込むことが可能。
OTTO MotorsのCTOであるライアン ガリエピー(Ryan Gariepy)氏は、次のように話している。
NVIDIA Isaac ROSがもたらす性能
Isaac ROSはAIの認識、画像処理およびナビゲーションのためのハードウェアアクセラレーション機能をROS 2開発者コミュニティに提供し続けている。自律動作ロボットには先進的なAIおよびコンピュータービジョンの性能が不可欠であり、Isaac ROSは、ロボティクス コミュニティがこれらの最先端テクノロジを簡単に導入できるようにするための NVIDIA の代表的な取り組み。
主要なIsaac ROSパッケージの最新の性能数値は、以下のサイトから確認できる。
Isaac ROS パフォーマンス概要
ROS 2開発者向けの無料トレーニング
先進のテクニカルトレーニングを提供し、Isaac ROSのエキスパートとのコミュニケーションを可能にするために、NVIDIAはROS 2の開発者を対象とした一連のウェビナーを新たに発表した。これらのセッションは無料で、ROS 2のアクセラレーテッドモジュールを開発している技術エキスパートとの質疑応答の時間も用意される予定。最初の3回のウェビナーのトピックは以下の通りとなっている。
スピーカー:Raffaello Bonghi 博士
12月:「Using Isaac ROS for Stereo-Based Depth Estimation」(Isaac ROS を活用したステレオベースの奥行きの推定)
スピーカー:Hemal Shah氏
12月:「Building an Isaac ROS accelerated module using YOLOv5」(YOLOv5 を活用して Isaac ROS で高速化されたモジュールを構築)
スピーカー:Asawaree Bandhi氏
11月14日のウェビナーは以下から登録可能で、このシリーズの他のウェビナー情報も今後追加される予定。
https://gateway.on24.com/wcc/experience/elitenvidiabrill/1407606/3998202/isaac-ros-webinar-series
ROSCon 2022でIsaac ROSのライブデモを実施
京都で開催中のROSCon 2022にて、10月20日午後14時10分(日本時間)よりテクニカルセッション「gz-omni: Bridging Gazebo with Isaac Sim」(GazeboとIsaac Simを接続する)のライブ配信を予定。また、NVIDIAのブース #22では、NVIDIA Jetson AGX Orin 開発者キット上で動作するIsaac ROSのライブデモを確認できる。






