最先端のAI・ロボティクスの技術を活用したソリューション提供を行うTRUST SMITH株式会社は、モデルレスでの高精度・高速なばら積みピッキングを可能とするピッキングシステム「ANY PICKER」の提供を開始したことを発表した。
同製品は事前学習なしで高速(0.1秒で認識)かつ高精度(99.99%)なピッキングを可能とし、あらゆる現場のピッキングタスクの省人化に貢献する。
製造・物流現場におけるピッキングの課題
製造・物流の現場では人口減少による労働力の不足が深刻な課題として存在しており、ロボットやAIによる自動化・効率化が求められている。その中でロボットアームによるピッキング業務の代替は工場・倉庫におけるDXの要となる。
従来のピッキングソフトウェアは、ピッキング対象物の事前登録または事前学習が必要で、事前にデータを用意できない対象物のピッキングはできなかった。例えば、扱う商品が数万単位で存在しているEC物流倉庫や、食品工場における唐揚げなどの不定形物のピッキングなどは困難であった。
TRUST SMITHはこれらの課題を解決する独自のピッキングアルゴリズムを開発した。
モデルレスピッキングシステム「ANY PICKER」の特長
TRUST SMITHのモデルレスピッキングシステムは下記の特長を有し、製造・物流の現場における省人化に大きく貢献する。
特長1.ティーチングレスでのピッキングが可能
事前の学習なしでピッキングが可能なため、事前学習が困難な物体のピッキングも可能。扱う商品が頻繁に変わる現場での適応が可能となるほか、学習期間が不要なため技術理解がなくても短期間で導入可能。
特長2.不定形物などの、認識の難しい物体にも対応
認識対象のばら積み物体(洗剤の詰め替え容器などの不定形物を含む)。
不定形物に対しても、吸着点を算出してピッキングに成功
従来、認識が難しいとされていた下記の物体への対応も可能。
・不定形物(唐揚げ、洗剤の詰め替えなど)
・金属光沢やプラスチック光沢を有する物体(金属部品、アルミホイルなど)
・平面に隙間なく敷き詰められた箱などの物体
・丸みを帯びた物体(カップ麺など)
下記画像のように、隙間なく敷き詰められた箱の境界の認識は深度画像だけでは難しいが、同システムではRGB画像から物体境界を検出し、吸着困難な候補を除外する。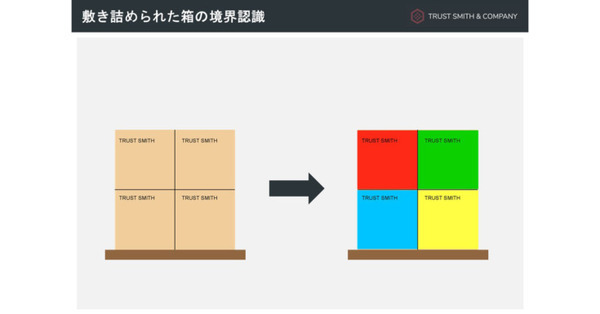
特長3. 高速ピッキング
わずか0.1秒で吸着位置を算出でき、高速なピッキングを実現する。それによりタクトタイムの厳しい現場でも実用可能。
特長4.高精度なピッキング
50アイテムを対象としたピッキング試験(*1)の結果、99.99%の吸着成功率を記録した。
技術詳細
同システムの、認識から吸着までの流れは大まかに下記の通り。
1.深度カメラ、RGBカメラにより吸着対象の深度画像とRGB画像を取得
2.深度画像とRGB画像をフュージョン処理(*2)し、終着位置を算出
3.経路計画・吸着
モデルレスピッキングシステムの応用範囲
同システムによって省人化に貢献することができる応用範囲は下記の通り。
毎日取り扱う商品が変わる、EC物流倉庫の自動倉庫から搬送されてきたアイテムを注文ごとに同一の段ボールを詰めて梱包するタスク
1. 唐揚げなどの不定形物を扱う、食品工場やスーパーにおける弁当箱などへの詰め込みタスク
2. 金属光沢を有し、複数サイズ・形状が混在するばら積みネジのピッキング
3. 農作物、水産物といった形がバラバラなワークのピッキング
4. 宇宙空間などの無人環境におけるピッキング
今後の展望
TRUST SMITH株式会社は今後、モデルレスピッキングシステム「ANY PICKER」の更なる改良を進めるとともに、次世代の自動倉庫システム「RENATUS」、AGV最適制御システム「PYUTHIA」、汎用型搬送ロボット「Kaghelo」などのTRUST SMITHグループで保有する製品と組み合わせることで、クライアントのスマート化に貢献していく。
TRUST SMITH株式会社について
TRUST SMITH株式会社はAI・数理アルゴリズム・ロボティクス分野の最先端のテクノロジーを活用してイノベーションを創造する東京大学発のベンチャー企業。ハード・ソフト問わず、様々な技術領域において自社製品の研究開発に取り組むとともに、オーダーメイドで企業の課題に合わせたソリューションの提供や研究の支援を行う。
TRUST SMITH株式会社
東大発AIベンチャーTRUST SMITH 本社工場を4倍規模の工場へ拡大移転 アームロボット、フォークリフト、AGVの研究開発を加速
フードデリバリーの宅配経路をAIで最適化 多くの注文をより少人数で早く配送へ 東大発ベンチャー
TRUST SMITH 深層学習モデルの量子化でデータ処理速度を最大5倍にすることに成功「エッジAI」の実用化に貢献
【速報】東大発AIベンチャーTRUST SMITHが運搬業務を自動化する「自動搬送ロボット」を開発 人との協働をデザインで表現
東大発AIベンチャーが映像内の個人情報を自動でマスキングする「モザイクAI」のリアルタイム処理を実現
TRUST SMITH関連記事