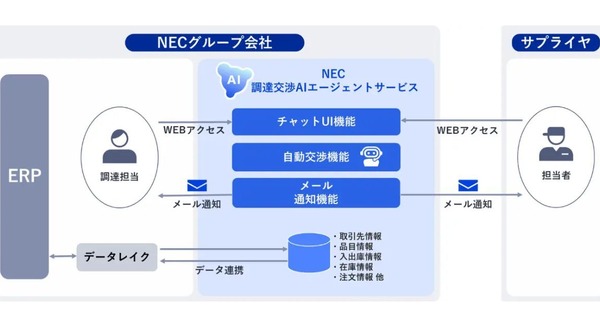






NECが2023年3月3日、物流倉庫のDX推進を加速する3つの最新ロボティクス技術を発表したことは既報の通り(関連記事「NECが物流DXを加速する3つの新技術を公開!世界モデル搭載「ロボット制御AI」技術の特徴とメリット」)。NECは今後、物流倉庫や工場などのロボット作業で新技術の検証を進め、新技術は2024年度中の実用化を目指している。

前回の記事では「世界モデルを採用した臨機応変にモノをつかむハンドラーロボット技術」に焦点を当てたが、今回の記事では「リスクセンシティブ確率制御による搬送ロボットの高度化技術」と「大量のAIカメラ映像をエッジとクラウドで効率的に分散処理できるアプリケーションアウェアICT技術」を紹介したい。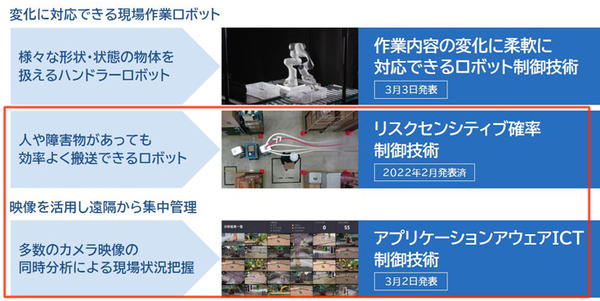

リスクセンシティブ確率制御による搬送ロボットの高度化
この日、NECが発表した3つの技術はいずれも倉庫の自動化とDXを進め、人とロボット、人とAIがそれぞれの得意な作業を分担協働していくことを前提に、ロボットやAIができる範囲を拡張していこうという技術だ。
「リスクセンシティブ確率制御による搬送ロボットの高度化技術」は、ロボットによる倉庫内での搬送作業を、高い安全性を維持しつつ、効率を2倍向上させる制御技術(従来比)のこと。この技術は2023年度に実用化し、NECが開発している協調搬送ロボットへの搭載を予定している。
安全性も効率性も両立させる新技術
人間が自動車を運転する時に危険度が高いところは徐行や一時停止し、安全なところは速度を上げて入るのと同じように、ロボットにも周囲の状況に合わせた速度の調整や一時停止、安全な場所での比較的高速な走行を制御することで、自動搬送の作業効率が上がることは容易に想像できる。
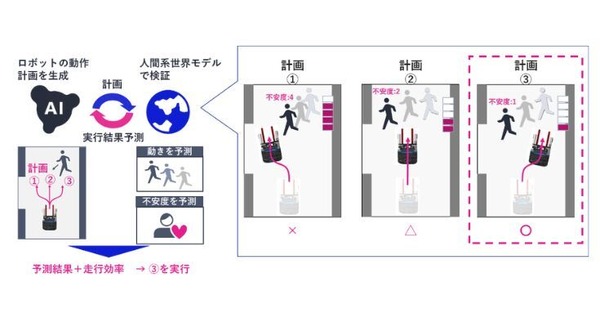
そこでNECは、作業者や床上の物品など、障害物がなくリスクが低い場所では最短距離を高速走行し、リスクが高い場所では確実に回避できる経路を低速走行するといった制御をロボットが自律的に判断し実行する技術を研究している。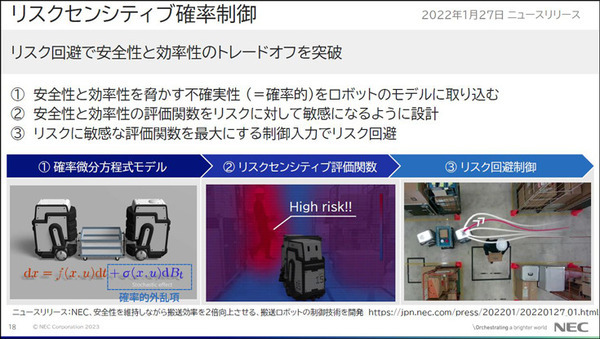
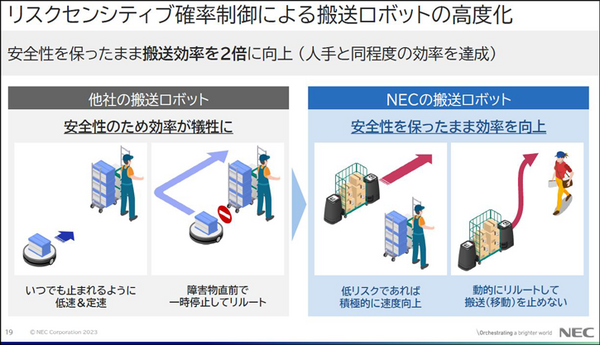
安全性を確保しながら搬送効率を2倍向上
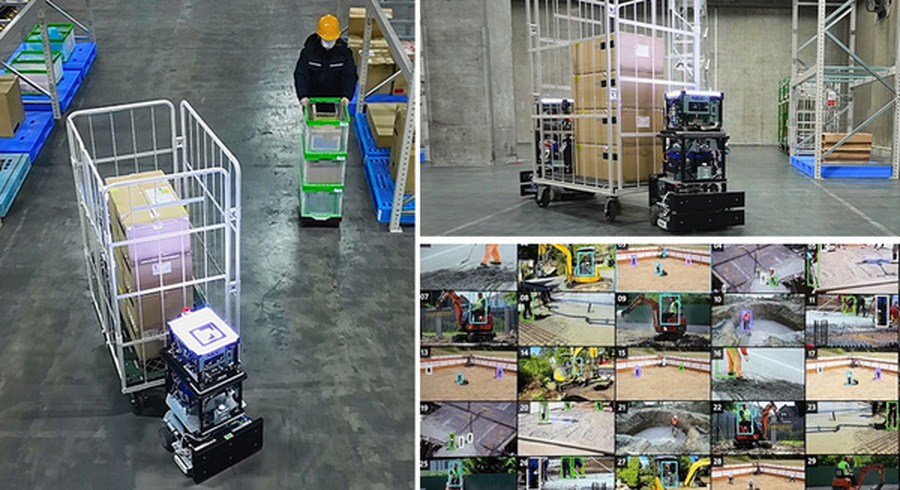
この技術を適用したロボットと従来のロボットで搬送作業を比較したところ、作業時間が半分となり、安全性を確保しながら搬送効率を2倍向上できることを確認した。また、ロボット専用エリアを整備しなくても安全性と効率性を実現できるため、既存倉庫への導入が容易となる。
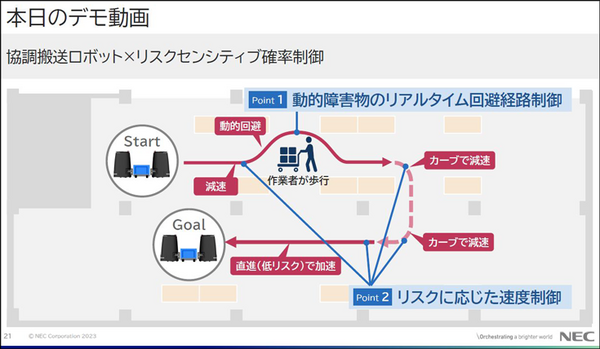
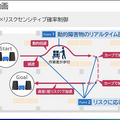
■リスクセンシティブ確率制御による搬送ロボットの高度化技術
AIカメラ映像をエッジとクラウドで効率的に分散処理
製造業の工場や物流倉庫、工事現場、鉄道のホームや踏切など、AIカメラが監視して異常を発見したら即座に通知するシステムの導入が急速に進んでいる。この技術の多くは、現場に置かれた「エッジ側のAIカメラ」と、大量の演算を処理できる「AIクラウド」で構成されている。そして、そこには課題がある。エッジ側(AIカメラ)での画像解析処理の演算には負担が大きく、高性能になってきたとはいえ、大量の映像を処理するのには限界がある。万が一、処理が追いつかなければ、重要な危険な異常を見逃してしまう結果も招きかねない。
一方、カメラの映像をクラウド側に送って超高速に解析させる方法があるが、その場合は高解像度の映像データをエッジからクラウドに送信ため、膨大なデータ量の移動が課題となり。これも別の課題を生むことにもなりかねない。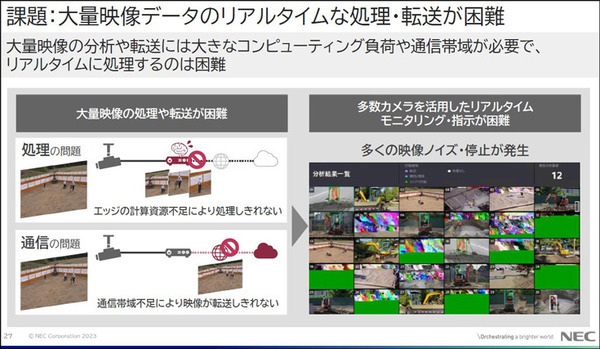
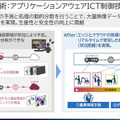
人間であれば無意識に、映像全体の中からある程度危なそうなところに注目して見逃しを防いでいるが、これをAIソリューションに応用したのが「大量のAIカメラ映像をエッジとクラウドで効率的に分散処理できるアプリケーションアウェアICT技術」だ。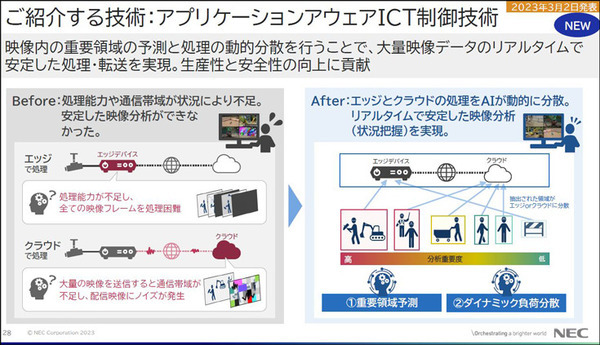
重要領域予測
この技術の要はまず「重要領域予測」だ。エッジ側で映像内から重要な領域を予測する。作業している人の動きに注目して転倒がないか、重機や建機、機械や建設中の穴などに作業員が近付いていないか等、AIがカメラ映像に映った人やモノから映像分析AIでリアルタイムに重要度を判定、処理すべき重点領域の映像範囲を特定する。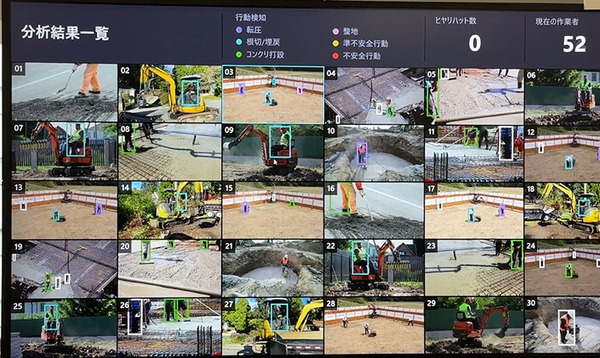

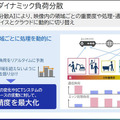
ダイナミック負荷分散
もうひとつは「ダイナミック負荷分散」。ダイナミック負荷分散AIが、映像内の領域ごとの重要度や処理・通信負荷に応じて、処理をエッジデバイスとクラウドに動的に切り替えて、分析の効率を上げると共に、分析の精度を最大化する。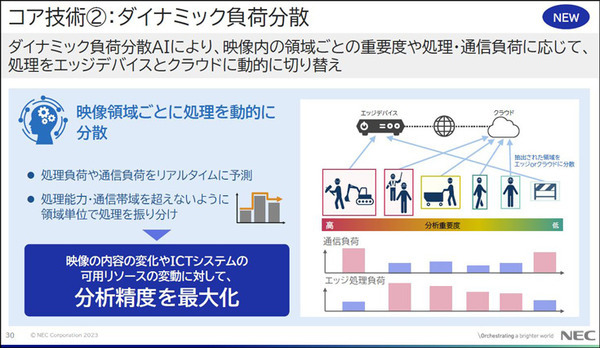

■AIカメラ映像をエッジとクラウドで効率的に分散処理デモ フル動画