凸版印刷株式会社は、東京農工大学と複数のロボットの行動を最適化するアルゴリズムに関する共同研究を開始する。
この共同研究では、人とロボットの協働に向け、マルチエージェントシステムを活用し、複数の自律的なロボットをAIカメラ、各種センサーやスマートフォンなどのエッジデバイスと連携させ、人の行動を予測するだけでなく、様々な状況の変化にも対応させる技術を確立するのが狙い。
凸版印刷は、東京農工大との共同研究を通じ、ロボットとAIの活用を推進し、物流・小売・スマートシティなど幅広い領域において、人・ロボット・AIが協働できる社会を実現したい考えだ。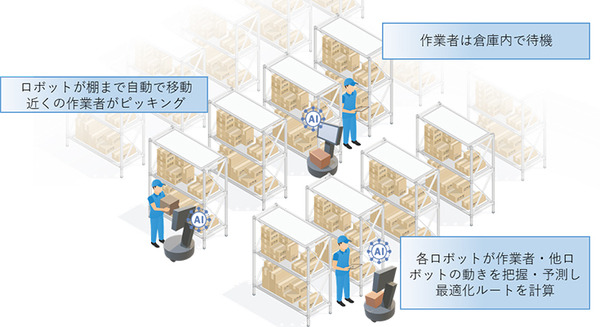
ロボットによる社会支援に向けた研究
近年の人口減少や超高齢社会を背景に、労働力不足が深刻化しており、人の業務を代替する「自律動作ロボット」の活用が進んでいる。特に、規模の大きな物流倉庫などでは、完全ロボット化に向け、自律走行搬送ロボット(AMR)の導入が進められている。一方、中小規模の物流倉庫でもAMRの導入は進んでいるものの、スペースや費用が限られることから、そのほとんどで人が介在している。そのため、人とロボットが衝突したり、相互に作業の妨げになって作業効率が落ちるなど様々な課題があり、予測が難しい行動をする人と、協調・協働できるロボットの開発が期待されている、としている。
また、過疎化が進み、食料品・生活必需品を販売する店舗の減少、公共交通機関の廃止など、生活に必要なインフラ・サービス維持が困難な地方においても、自動走行ロボットによる配送・移動式販売や、高齢者向けパーソナルモビリティロボットなど日常生活の支援のためのロボット活用が検討されている。
このような課題を鑑みて、凸版印刷は「複数のロボットやエッジデバイス間」で様々な情報を共有し、それらのシステムが自律的に環境と状況を判断し、適切な行動をリアルタイムに行う「マルチエージェントシステム」に着目し、この技術を研究する東京農工大・藤田准教授の研究室と、人とロボットの協働に向けたAI技術に関する研究を開始する。
共同研究の概要
この共同研究では、物流倉庫でのピッキング作業における、人の動きを考慮した自動搬送ロボット(AMR)の搬送経路の最適化を目的とするAI技術に関する研究開発を行う。
(1)ロボットとエッジデバイス用AIの開発
AMRやスマートフォンなどの各システム上で動作するAIを開発する。これにより、複数のAMRやエッジデバイス間で共有した様々な情報を利用して、各AMRが自律的に環境と状況を判断し、最適なルートをリアルタイムに動作することが可能になる。
(2)ピッキング倉庫における実証
物流倉庫におけるピッキング業務の省人化・省力化を目標に、(1)で開発したAIを活用したモデルラインを構築し、技術検証を実施する。
また、作業者が業務開始前に(1)を用いて様々な条件でピッキング作業をシミュレートし、作業計画を策定する補助ツールとしての利便性についても検証する。
各組織の役割
・凸版印刷
最適化アルゴリズムのAMRへの実装と、ピッキングシステムの試作を行い、実際にピッキング倉庫における評価実証に取り組む。
・東京農工大
東京農工大・藤田 桂英研究室はマルチエージェントシステム、自動交渉、大規模合意形成支援システムといった研究に取り組んでおり、人間とAIが協調する社会を推進している。この共同研究では、マルチエージェントシステムを活用し、経路最適化アルゴリズム・シミュレーターの開発を行う。
今後の目標
凸版印刷は、東京農工大と共同で、倉庫において人と協働する複数台AMRの経路最適化システムを開発し、社内業務の効率化や、外販サービスとして展開していくほか、マルチエージェントシステムを活用したサービスソリューションを、物流・小売り・スマートシティ向けに展開する。また、AIとロボットの活用を推進し、産業と技術の発展に貢献する。