

チトセロボティクスは、ロボットアーム搭載型の自動誘導搬送車(AGV)や自動自律搬送ロボット(AMR)に同社のロボット制御ソフトウェア「クルーボ」を実装し、高度な器用さと精密性を実現したと発表した。
従来、AGVやAMRの位置決め精度の限界から、モバイルマニピュレータのようなロボットアームでの精密な作業は難しいとされてきたが、新たなビジュアルフィードバック制御により、その課題を乗り越えたとしている。
カメラを活用した画像認識によってロボットアームの自律的な動作を実現
「クルーボ」は、チトセロボティクスの産業用ロボット制御ソフトウェアであり、カメラを活用した画像認識によってロボットアームの自律的な動作を実現する。
環境変動のある現場でも、カメラを通じて作業対象を正確に認識し、高度な自動化が可能となった。これにより、組立作業などの精密な動作を必要とするタスクにおいても、高い品質と効率を実現できるとしている。
動画の概要
最初の動作では、ランダムに配置されたLED部品をカメラ画像から認識して、エンドエフェクタでピック。パーツの位置に対してビジュアルフィードバック制御することで、モバイルマニピュレータの停止位置に依らず、精確なピッキングが可能。
次に、ピックしたLED部品の向きを、モバイルマニピュレータに搭載されたカメラで認識して、整列させるために持ち替え、最後にワークであるLED部品の足をカメラで認識しながら、ブレッドボード穴まで誘導制御することで挿入している。
LED部品の足は0.5mm、ブレッドボードの穴径は0.7mmで、モバイルマニピュレータによるキャリブレーションレスの高精度制御を実現した。
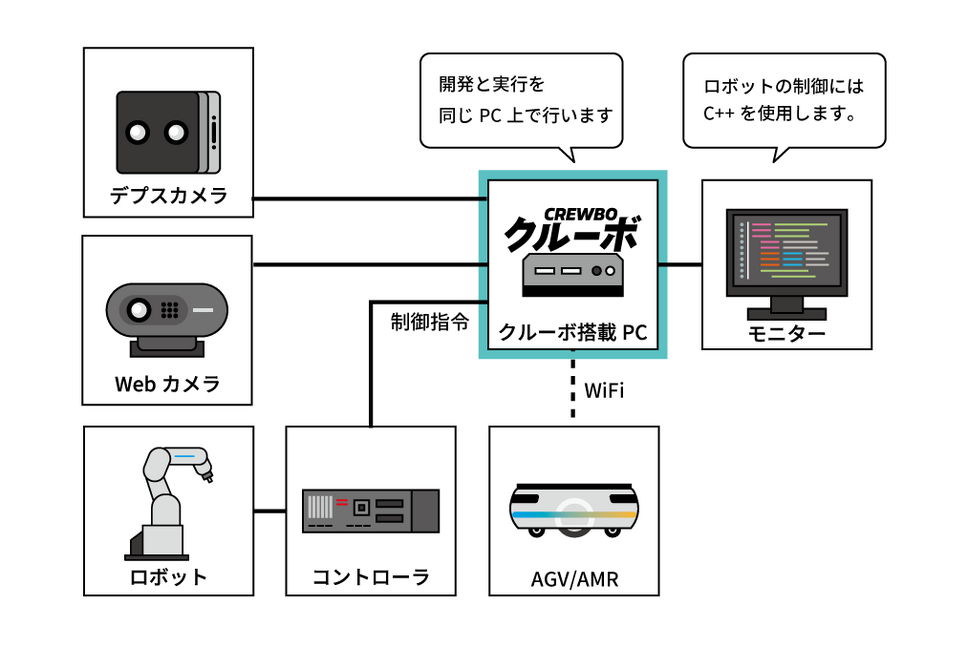
ロボット制御ソフト「クルーボ」はロボットシステムをシンプルに構築することができる。ロボット手先に搭載されたハンドアイカメラと、モバイルマニピュレータに搭載された固定カメラの合計2台のカメラと、「クルーボ」をインストールした制御コンピュータ1台で複数のビジュアルフィードバック制御を実現可能。
「クルーボ」なら、システム立ち上げの負担をなくすことができる。動画のなかのロボットアーム、カメラ、エンドエフェクタ、作業環境は厳密なキャリブレーションをされておらず、ありあわせのロボットシステムで構成されている。「クルーボ」は高精度なロボット制御を実現するために設計されており、校正なしでも優れた性能を発揮することができる。
AGVやAMRなどの移動システムは、床面の凹凸や乗り越える段差、タイヤの空転などによって現場環境での位置決め精度を高めることが困難だが、「クルーボ」を活用したロボットアプリケーションでは、ロボットアームの手先カメラから得た画像に基づいて周辺環境を認識し、リアルタイムに、ロボット手先の移動経路を生成することで環境変動の問題を解決することができる。ロボットアームが搭載された移動台車の位置決め精度が低い場合でも、ロボットアームを高精度に制御することでシステム全体で器用かつ精密な動作が可能。
クルーボについて
クルーボはだれでも簡単に、カメラを使った高精度なロボット制御ができるプログラミングソフトウェアであり、チトセロボティクスが発明した「キャリブレーションの負担なしで、0.02mmの超高精度制御を実現するロボット技術」を買い切りで提供する。高度な画像認識と高速なロボット軌道制御が可能なコンピュータも付属し、必要なソフトウェアはすべてインストール済みなので、すぐに使用する可能となっている。
株式会社チトセロボティクス







