



テクノロジーソリューション事業を手がけるパーソルクロステクノロジー株式会社は、2月27日~3月2日に開催された『あいちロボットトランスフォーメーション』(ARX)において、3Dスキャナーを搭載した自動走行ロボットで公園内の巡回警備を行う実証実験を実施した。
実証実験概要
今回の実証実験は、広い公園内を自動警備ロボットが巡回し、駐輪禁止区域の自転車を減らす作業を補う内容となっている。
『Hisaya-odori Park』には駐輪場が用意されているものの、駐輪禁止区域に多くの自転車が止められており、公園利用者の通行の妨げになり、景観の悪化にも影響している。また放置自転車が多い場所は管理不十分であると認識され、犯罪が起こりやすい場所になることも懸念されているという。
その一方で、それを警備するための労働力付属が懸念されている。1995年をピークに年々減少している生産年齢人口は、2050年には2021年から29.2%減の5,275万人になるという説もある。
そこで自動走行ロボットによる24時間巡回警備による犯罪を抑止し、3Dスキャナーを活用した放置自転車の発見による巡回警備のサポート、そして駐輪禁止区域の自転車を減らすことを目的とした実証実験が行われた。
※内閣府(2022)「令和4年版高齢社会白書」
https://www8.cao.go.jp/kourei/whitepaper/w-2022/zenbun/pdf/1s1s_01.pdf
ロボットについて
放置自転車を検出
同社がカスタマイズした自動搬送ロボットに、バイトム製の3Dスキャナー『OWL(アウル)』を搭載。このスキャナーはリアルタイム3次元マッピングを行い、物体検知を可能とする。所得したデータはネットワークを介して、PCやタブレットなどのデバイスで確認することができる。そのため、管理者は管理室に居ながらにして園内の様子をリアルタイムに知ることが可能となる。従来より、自動運転の警備ロボットは存在しているが、自転車を検出できるロボットには新規性があるとしている。
来園者のプライバシーを守る
3Dスキャナーはカメラと異なり、撮影ではなく人物を物体として検出する。スキャナーを採用することで、公園に訪れる人たちを特定せず、プライバシーを守ることが可能となっている。また通常のカメラでは弱い、暗闇での物体検出も可能となる。
テクノロジーソリューション企業ならではのロボットカスタマイズ
商業施設や公園、倉庫など場所によってロボットに求められる機能や性能は異なる。しかし、一般的にロボットを販売するメーカーでは汎用品を販売する。そこでそれら汎用のロボットをベースに、パーソルクロステクノロジーが顧客に合わせたカスタマイズを施すことで個別最適化を行い、顧客の課題解決に導くとしている。
実証実験の結果
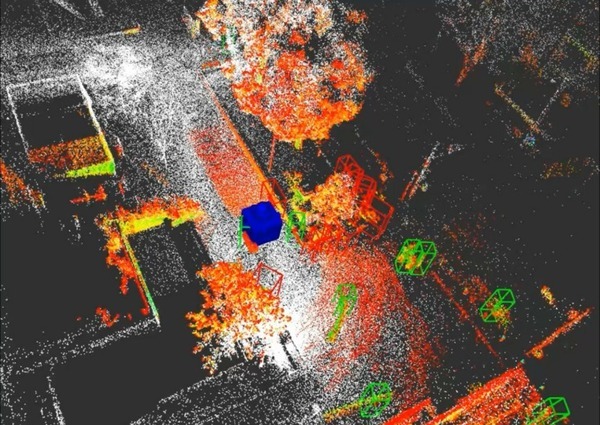
今回の実証実験では、リアルタイムで届く点群データにより、離れた場所からでもPCなどで放置自転車の特定が可能であることを確認した。事前に設定したルートをロボットが自動走行することで、警備員が公園内を歩き回る必要がなく、放置自転車の発見に人材不足を補う支援が可能であることが実証できた。
今後の展開
今回の実証実験の結果を踏まえ、日本の社会課題である人材不足問題を解決と、人間とロボットが共存できる社会を目指す。これまでは倉庫などでモノを運ぶために使用されていた自動搬送ロボットを、3Dスキャナーと組み合わせることで巡回警備が可能な自動走行ロボットとして展開することができる。









