



東京大学発スタートアップの株式会社Highlandersは、国産AIロボットを用いたクマ対策プロジェクト「KUMAKARA MAMORU」を2025年12月24日に開始すると発表した。防衛・インフラ分野など極限環境で実証を重ねた国産AI四足歩行ロボットを市街地近接の里山境界に展開し、人身被害の未然防止を図る構想だ。
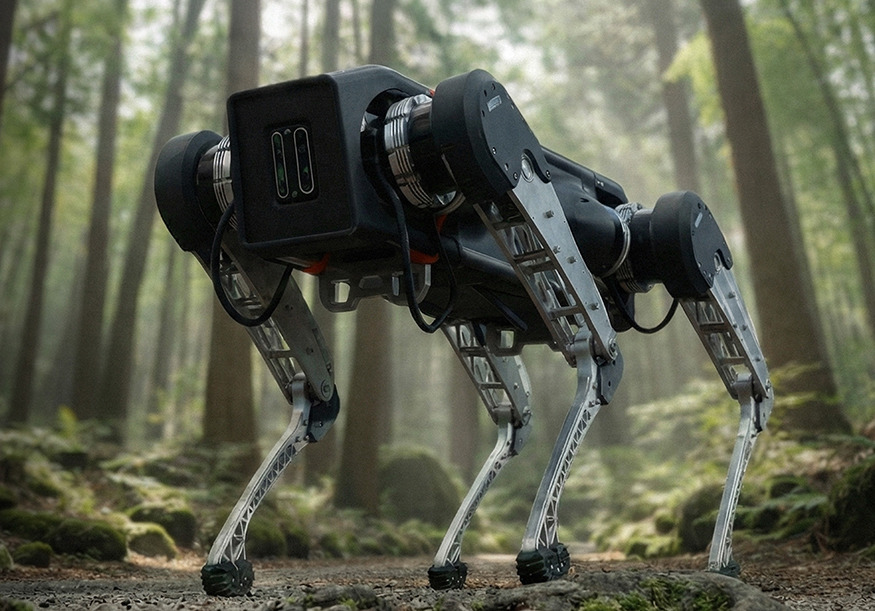
人を現場に出さない、国産AI四足歩行ロボットでクマ被害を防ぐ
背景には、都市部や住宅地での出没が増える「アーバン・ベア」問題と、対策を担う猟友会の高齢化・人手不足がある。危険な巡回や追い払いの現場に人を送り込まず、ロボットが代替する発想により、継続可能な運用モデルの確立を目指すという。国産機の信頼性と国内環境に最適化された設計を前提に、実運用レベルの対策インフラ化を狙う。
検知・威嚇・誘導をAIで実現、実運用レベルの対策インフラへ
同プロジェクトの目的は駆除ではなく、人と野生動物の距離を取り戻すことにある。人里と山林の境界(バッファゾーン)にロボットを常駐・巡回させ、AIがクマの接近を検知・判断し、威嚇で山側へ誘導する。「ここから先は人の生活圏」という境界意識をクマに学習させ、住民の安全確保と現場負担の軽減を両立させる狙いだ。
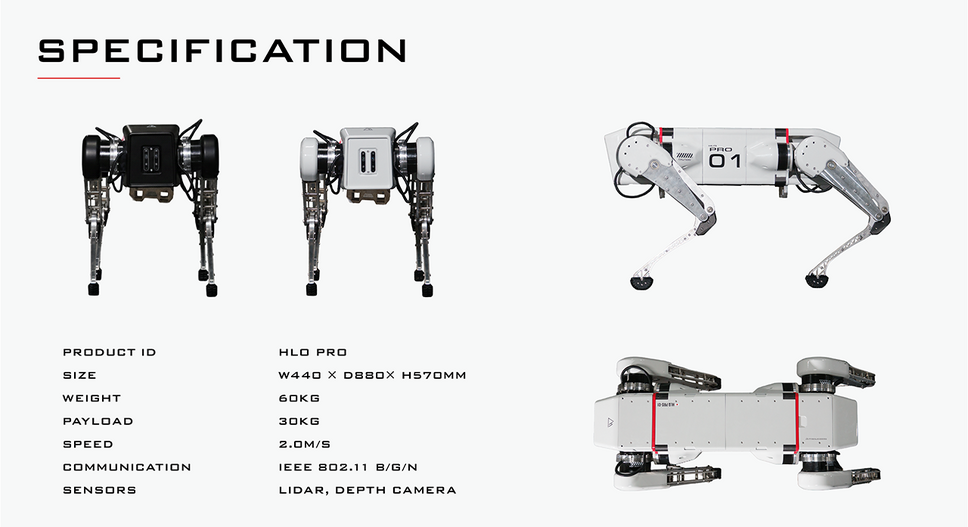
技術面では三つの機能を中核とする。第一に、不整地での遠隔操作パトロールだ。強化学習ベースの自律歩行により、急斜面や瓦礫、藪が続く密林エリアでも車両やドローンが入りにくい地点へ踏破する。第二に、30kgのペイロードに基づく重量装備での追い払いである。総重量60kgの機体と高トルク関節により、大型スピーカーや強力フラッシュライトなどを搭載し、視覚・聴覚両面から強い忌避行動を促す。第三に、AIと赤外線サーマルカメラを組み合わせた早期検知だ。夜間や藪中でも熱源を捕捉し、解析結果と映像・位置情報を管理者へ即時共有することで、遭遇事故の予兆段階で介入する。
今後は里山環境での実証を本格化させ、ロボット介入がクマ行動に与える抑止効果や最適な威嚇手法を検証する。運用モデルを標準化し、自治体や地域団体と連携して全国展開を視野に入れるとしている。













