成田国際空港株式会社は、2026年3月9日(月)から27日(金)まで、成田空港において自動運転トーイングトラクターを用いた貨物搬送の実証実験を行う。
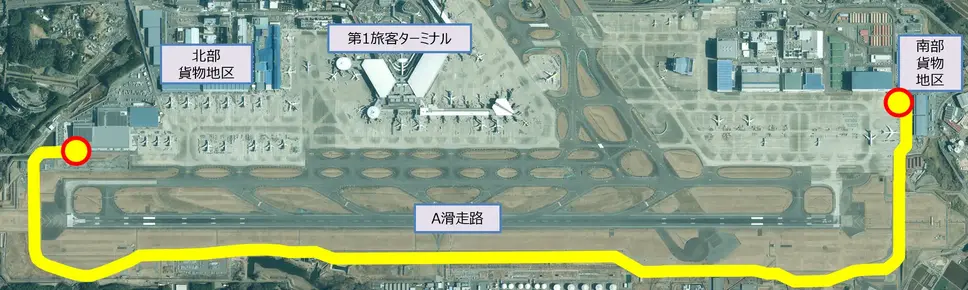
株式会社ANA Cargoの協力のもと、北部貨物地区と南部貨物地区間で実施される。
同社は2025年から2027年度の3カ年中期経営計画「Gear Up NRT」において、デジタル技術の活用による空港運営の高度化・効率化をテーマの1つとして掲げている。
空港運用現場の省人・省力化について、必要なインフラ整備やトライアルを通じた技術導入を促進する。
人手不足問題の解決策として自動運転技術を活用
今回の実証実験は、空港内における貨物搬送を従来の人手による搬送から、自動運転技術を活用した無人搬送へと移行し、深刻な人手不足問題に向けた解決策の1つとして実施するものだ。
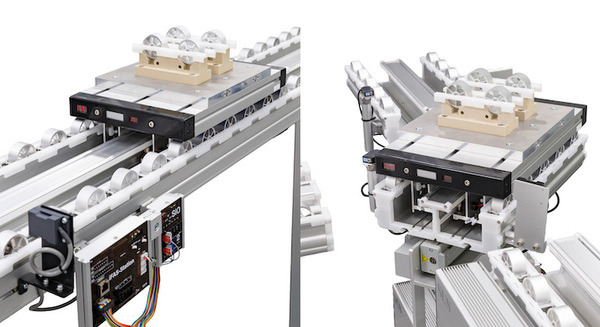
実証実験では、パレットドーリーに搭載された貨物を自動運転で約7kmの区間を搬送する。走行ルートは成田空港の北部貨物地区(第8貨物ビル)から南部貨物地区(整備地区スポット付近)となる。
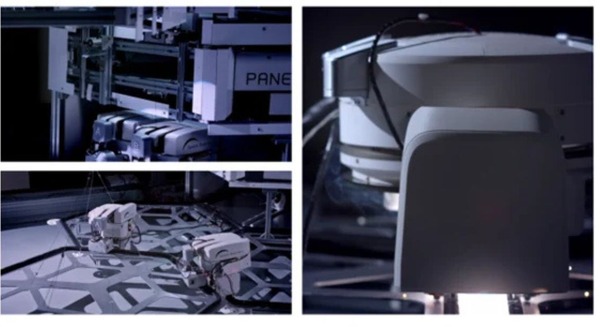
参加メーカーは株式会社豊田自動織機とナガセテクノサービス株式会社の2社。使用車両には、路面画像マッチング技術のRSPMやレーザー測距センサのLiDAR、磁気マーカー、GPS/GNSSとIMU(慣性計測装置)を組み合わせた自己位置推定など、高度な自動運転技術が搭載されている。
2026年度中の本格運用実現を目指す
車両に搭載したカメラで撮影した路面画像と事前に作成した路面画像マップデータをマッチングすることで、車両の位置・姿勢情報を取得する技術や、対象物にレーザー光を照射しその反射光を測定することで対象物までの距離を正確に測定できるセンサで車両周辺状況を把握する。
また、路面に敷設された磁気マーカの位置を車両に搭載された磁気センサで検知し車両位置を取得する技術も活用される。LiDARとカメラを組み合わせた環境認識により、周囲の障害物や車両・作業者をリアルタイムで検知できる。
GPS/GNSSとIMU(慣性計測装置)を組み合わせた自己位置推定により、走行中の位置や姿勢を正確に把握し、安定した自律走行を実現する。事前に作成した高精度マップと走行中にLiDARが取得する環境データを照合し、最適な経路追従や障害物回避を自律判断する自動運転制御(SLAMベース)を採用している。
同社は今回の実証実験を通じて、本格運用に向けた技術面、インフラ面などの課題を洗い出し、2026年度中のレベル4による無人搬送の本格運用の実現に向けた調整を進める。
成田空港では日本の国際競争力を支える社会インフラとして、そして地域の暮らしや産業を支える拠点としての役割を果たし続ける東アジアの貨物ハブを目指す方針だ。