ポケット・クエリーズは、鴻池組と2025年7月に発表した「四足歩行ロボットによる施工管理自動化プロジェクト」において、山岳トンネル建設現場の切羽(掘削最前線)での実証実験を行ったことを2026年5月25日(月)に発表した。
実証実験 日程:2026年2月8日(日)
今回の検証は「技術構想」の段階を経て、実現場での無人探査およびデータ取得に成功した「技術証明」と位置づけられる。
切羽への先行進入とガス検知を実証
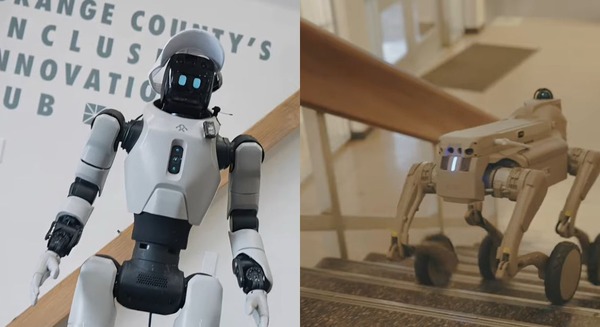
実証実験では、四足歩行ロボットUnitree B2-Wを使用。発破直後の地山崩壊や肌落ちの危険がある切羽に対し、人間が立ち入る前にロボットが先行進入した。
複雑な凹凸を伴う不整地においても、自律走行および遠隔操作による安全確保が可能であることが確認された。

また、搭載したガス検知センサーにより、切羽近傍の酸素濃度および可燃性・有毒ガスの有無をリアルタイムで遠隔監視。入坑可否を迅速に判断する体制の構築にも成功した。

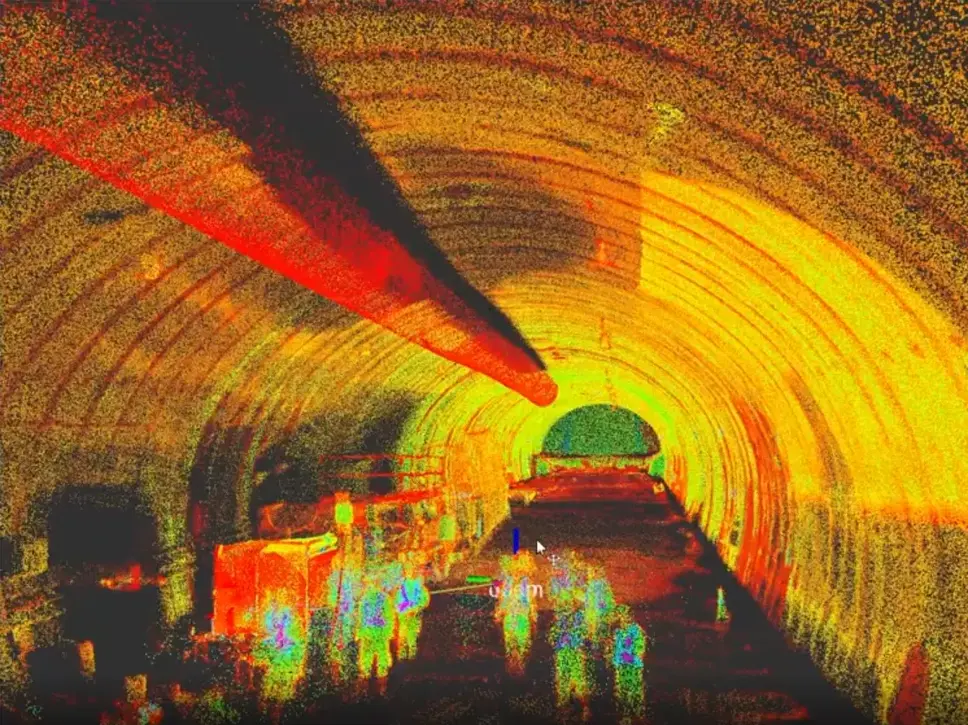
LiDARで3D点群データを取得、BIM/CIM連携も確認
レーザーを用いたLiDAR計測により、切羽および坑道の形状を3D点群データとして取得。取得データはBIM/CIMモデルとシームレスに連携可能であり、施工管理のデジタル化および経時的な形状変化のモニタリングへの寄与も確認された。
今後は複雑地形へのさらなる適応、長時間運用の確立、BIM/CIM連携の自動化という3点に注力し、実用化に向けた開発を継続する。両社は四足歩行ロボットの活用を「次世代の標準」として建設現場の安全性と生産性の変革を目指す。