KiQ Roboticsは、ロボットハンドツール「ラティス構造柔軟指」(以下、柔軟指)で培ってきた多品種把持・位置ずれ吸収の知見を活かし、フィジカルAI領域の研究開発に着手した。
公開研究であるUniversal Manipulation Interface(UMI)の可搬データ収集の考え方を土台の一つとしながら、柔軟指による実世界接触の安定化と段階的な実機評価を組み合わせ、産業現場で検証しやすいフィジカルAI基盤の構築を目指す姿勢だ。
柔軟指が「最後の接触」を物理的に支える
フィジカルAIにおいて、AIが正しく認識・判断しても、対象物との最終接点で滑りや把持ミスが発生すれば実運用には結びつかない。現場には多品種・少量、位置ずれ、ワーク形状のばらつきといった課題がある。
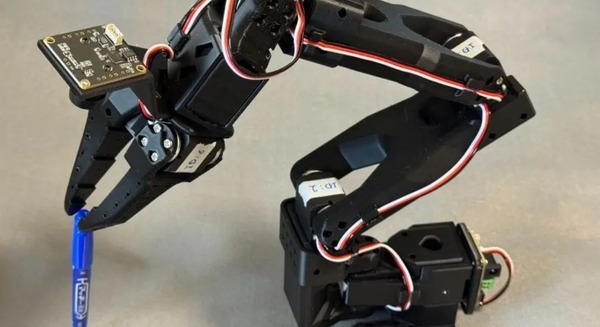
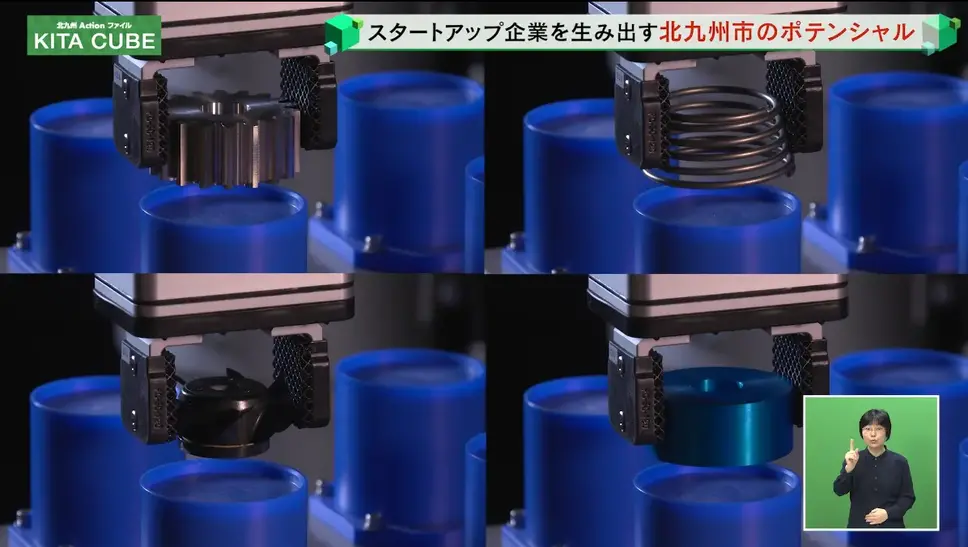
柔軟指はラティス(格子)構造の柔らかい指先がワーク形状にならって変形し、面接触で対象物を支えるロボットハンドツールだ。この物理的な形状ならい性が、AI制御に求められる接触精度の一部を補い、制御破綻を起こしにくい条件づくりに貢献する。同社はこの特性をフィジカルAI時代の実世界接点として位置づけ、「触れる・掴む」接触インターフェースとして発展させていく方針を示している。
開発の3つの重点と九州工業大学での活用事例
開発において同社が重視するのは以下の3点。
実世界接触の安定化:形状ならい性と面接触で位置ずれや形状差を物理側で受け止め、AI制御が最後の接触で破綻しにくい条件を整える。
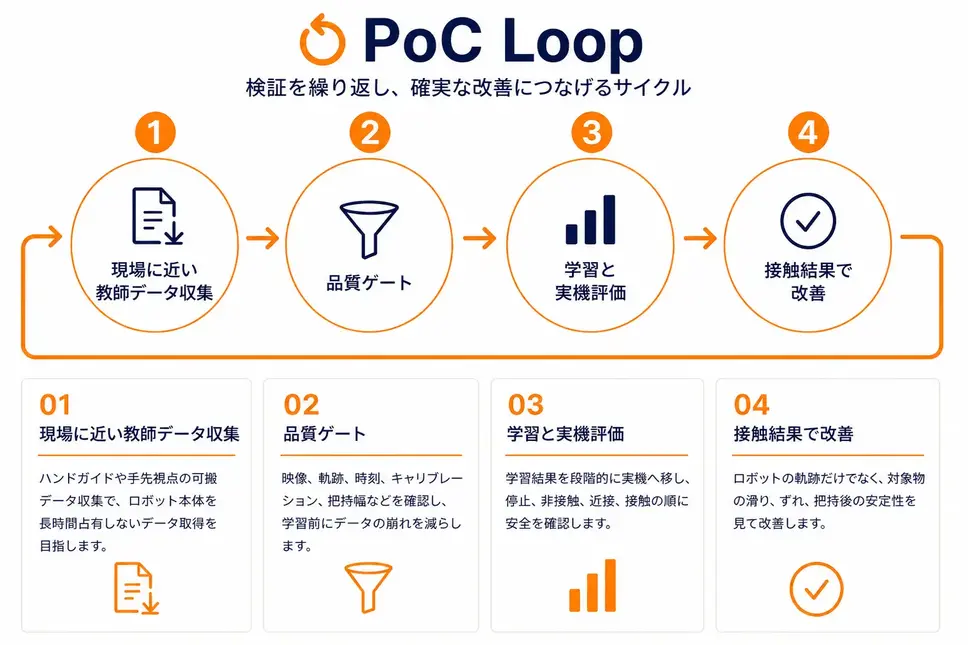
可搬データ収集とロボット作業学習:ロボット本体を長時間占有せず、現場に近い環境で教師データを収集し、対象タスクごとの学習と実機評価を進める。
データ品質と段階的な実機評価:停止・非接触・近接・接触へと段階を踏んだ実機評価を組み合わせ、現場で検証しやすい開発基盤を整える。
すでに九州工業大学 田向研究室の人工知能研究でも柔軟指が活用されており、家庭用サービスロボットによる動作データ収集において、指先の合わせ込みが厳密でなくても面接触で安定把持できる点が評価されている。
今後の展望
短期的には、多品種ワーク搬送・位置ずれを含む把持タスク・ワーク傷を避けたい工程を中心に、教師データ収集・学習・実機評価のPoCを推進する。中長期的には、公開されるロボット基盤モデルや新しい模倣学習手法を比較・活用できるよう、現場データ・評価ゲート・安全確認を組み合わせた基盤づくりを進める。
柔軟指は2026年4月時点で導入実績130件超、導入先50社超、リピート率約3割の実績を持つ。
ロボスタ・オンラインセミナー情報
アイリスグループのロボット事業拡大戦略 ~AIロボット市場の勝ち筋を探る
5月26日(火)には「実装」と「販売」の両輪でAIロボット市場を開拓している、アイリスオーヤマを筆頭としたアイリスグループによる「アイリスグループのロボット事業拡大戦略 ~AIロボット市場の勝ち筋を探る」を開催。

同グループの実績は、清掃ロボットを中心に導入企業7,000社以上、累計出荷台数は22,000台以上にのぼり、急成長を遂げています。
セミナーでは、アイリスオーヤマの大山社長が登壇、ロボット事業戦略についてご講演頂きます。続いて、東京大学大学院情報システム工学研究室(JSK)出身で、元Googleのロボットエンジニアであり、同社傘下のシンクロボの小倉社長より製品スペック等の詳細をご説明頂きます。
セミナーの詳細とお申し込みはこちら
ヒューマノイドは産業を変えるか トロンが語る「デジタルツイン×フィジカルAIが導くロボット実装の未来」
産業の現場において「フィジカルAI」や「ヒューマノイド」の社会実装が始まる中、その前提となるデジタルツインやシミュレーション環境の重要性が急速に高まっています。
本セミナー「ヒューマノイドは産業を変えるか トロンが語る「デジタルツイン×フィジカルAIが導くロボット実装の未来」では、製造業向けに先端技術の橋渡しを行うトロン株式会社の和嶋社長を迎え、フィジカルAIやヒューマノイド時代の自動化の最前線を解説します。
「ヒューマノイド導入には何が必要なのか」「なぜ今デジタルツインが重要なのか」「これから日本企業はどう対応すべきか」など、いま製造・物流業が直面する重要テーマについて掘り下げます。
さらに、今話題のヒューマノイドに対する同社のアプローチや、実用化に向けた現状と可能性についても解説していただきます。
セミナーの詳細とお申し込みはこちら。