




ヒューマノイドロボットの進化において、歩行やAIに注目が集まる一方、実際の社会実装を左右する重要な要素として「手(ハンド)」の存在が改めて注目されている。
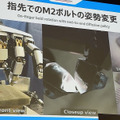
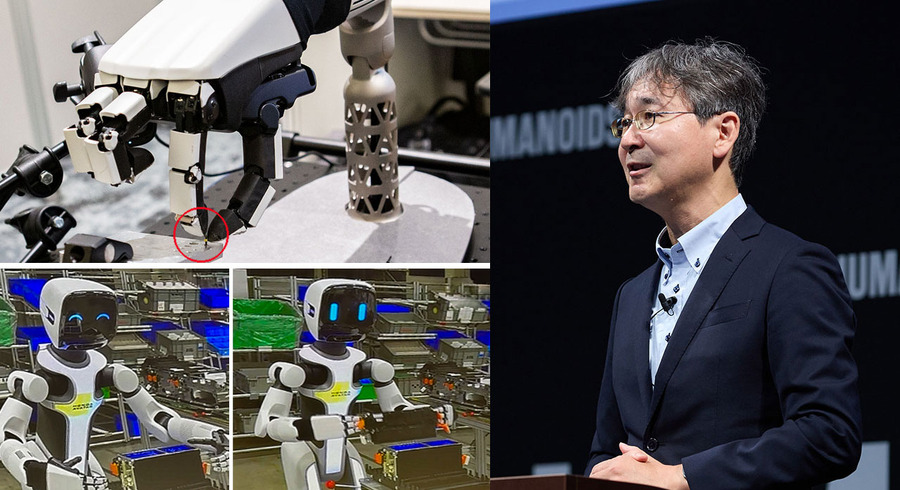
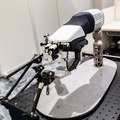
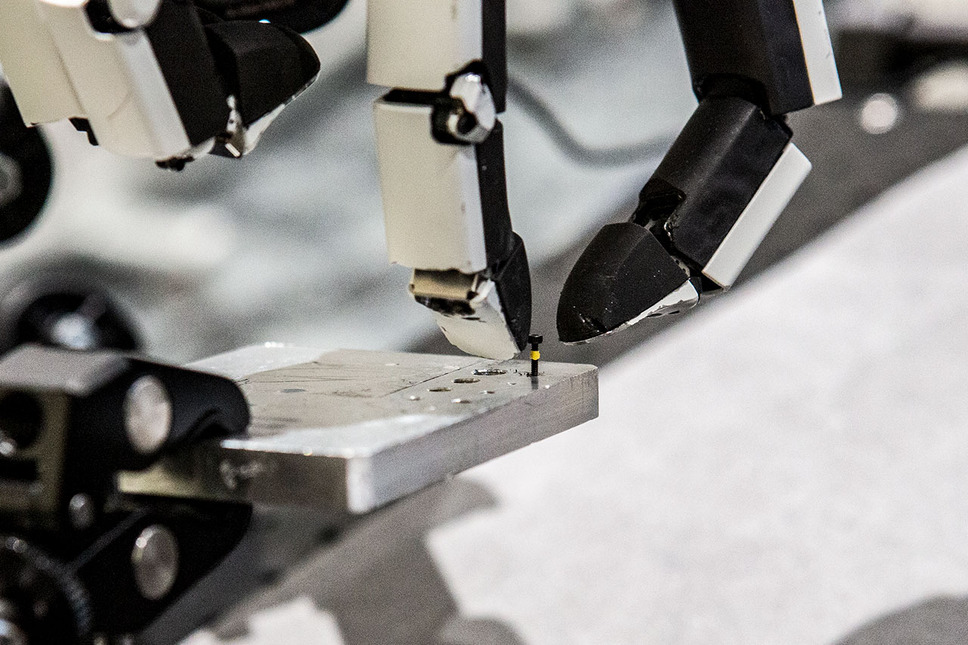
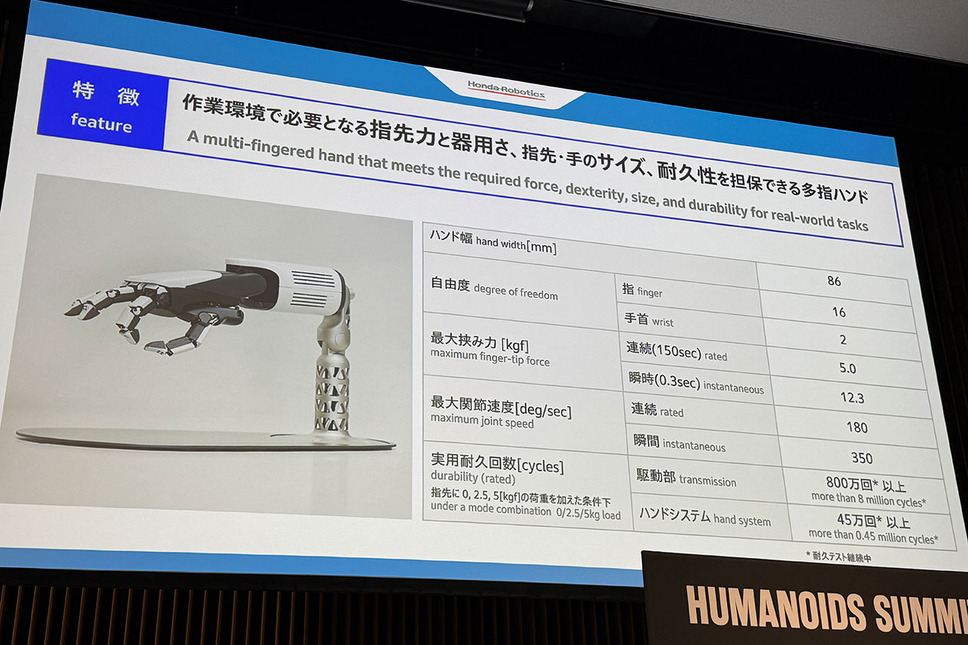
そんな中、本田技術研究所(Honda : ホンダ)は「Humanoids Summit Tokyo 2026」の展示ブースにおいて、開発中で新型の多指ロボットハンドを一般公開した。この多指ハンドの最大の特徴は、指先の力は人の2倍に達しながら、M1.6の小さなネジを回す繊細さを併せ持つ。
人間並みの器用さと人間を超える指先力を両立する「Willow Drive」
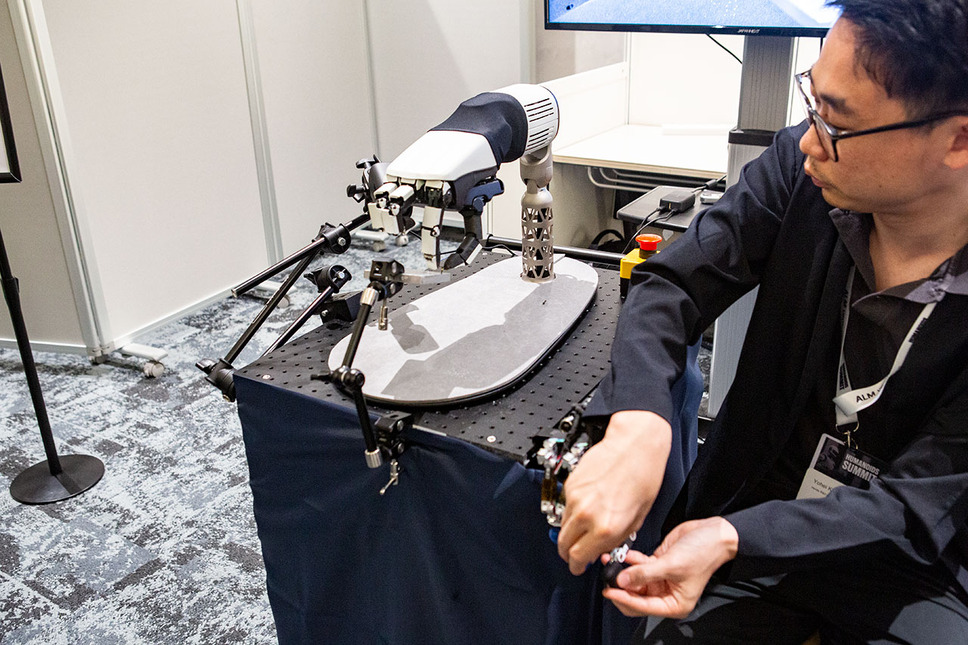
本田技術研究所 エグゼクティブチーフエンジニア 吉池孝英氏は、同イベントに登壇。Hondaが長年培ってきたヒューマノイド研究の歴史とともに、新たに開発した多指ハンドを詳しく紹介した。

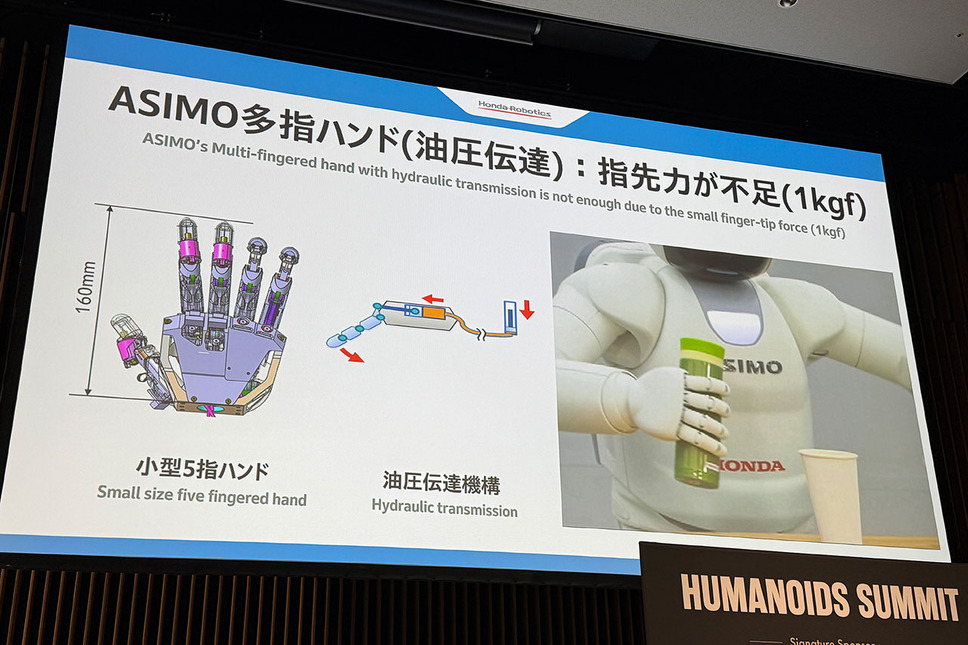
講演では、ASIMOから受け継がれるマニピュレーション技術の系譜を振り返りながら、人間並みの器用さと人間を超える指先力を両立する独自駆動方式「Willow Drive」を披露。製造業の現場で求められる精密作業と耐久性を実現し、ヒューマノイドの社会実装を加速させる可能性を示した。

■ASIMOの技術遺産を受け継ぐHondaのヒューマノイド研究
Hondaは1980年代から二足歩行ロボットの研究を続けてきた。
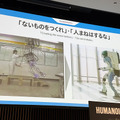
講演では、「ないものをつくれ」「人まねはするな」というHondaの開発哲学を紹介。世界初の実用的な二足歩行ヒューマノイドとして知られるASIMOへとつながる研究の歩みが振り返られた。
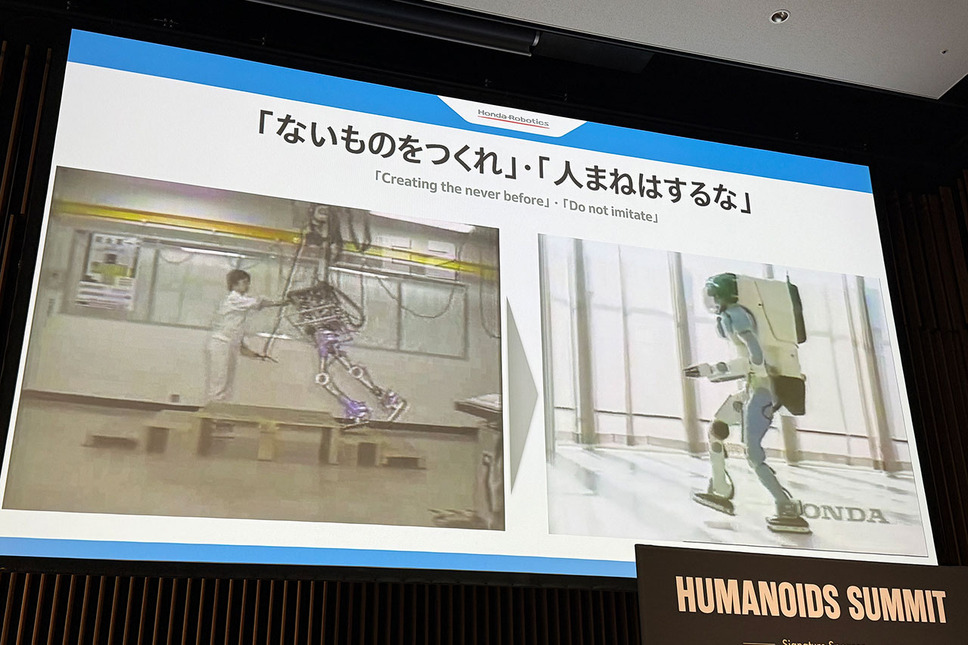
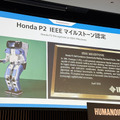
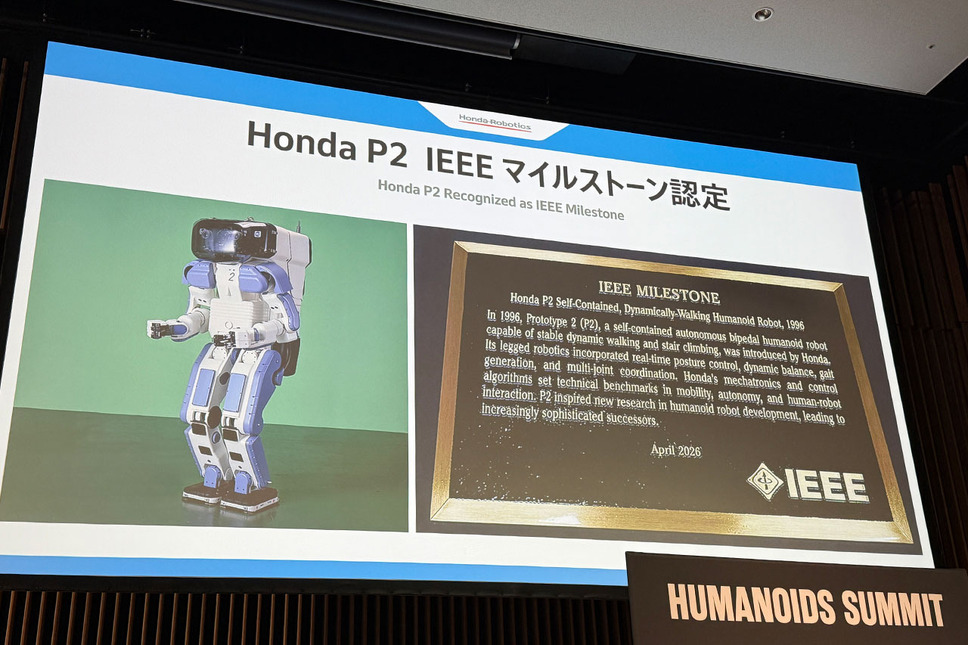
吉池氏は、ASIMOの開発終了後も歩行制御やマニピュレーション研究は継続していることを説明。さらに1996年に発表された「Honda P2」が2026年4月、IEEE Milestoneに認定されたことも紹介した。
■ヒューマノイドのボトルネックは「手」にある
現在、ヒューマノイド業界では、AIの進歩とともに歩行性能や全身の身体性能が話題になることが多い。しかし吉池氏は、実際の製造現場にロボットを導入する際に大きな壁となるのは「手」の性能だと説明した。
例えば工場では、
・コネクタの挿入
・配線作業
・部品組み付け
・ボルト締結
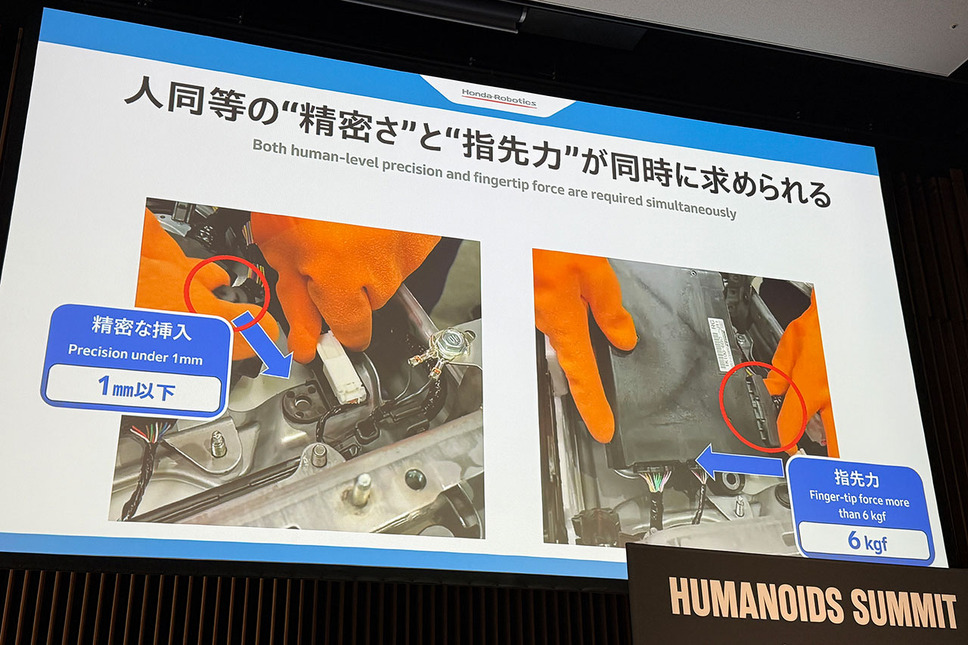
といった作業が日常的に行われている。これらの作業では、人間と同等の精密さと十分な指先力を同時に備える必要がある。
講演では、自動車製造工程の例として、
「1mm以下の挿入精度」
「6kgf以上の指先力」
が求められるケースが紹介された。
■既存の多指ハンドが抱える課題
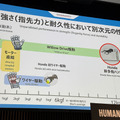
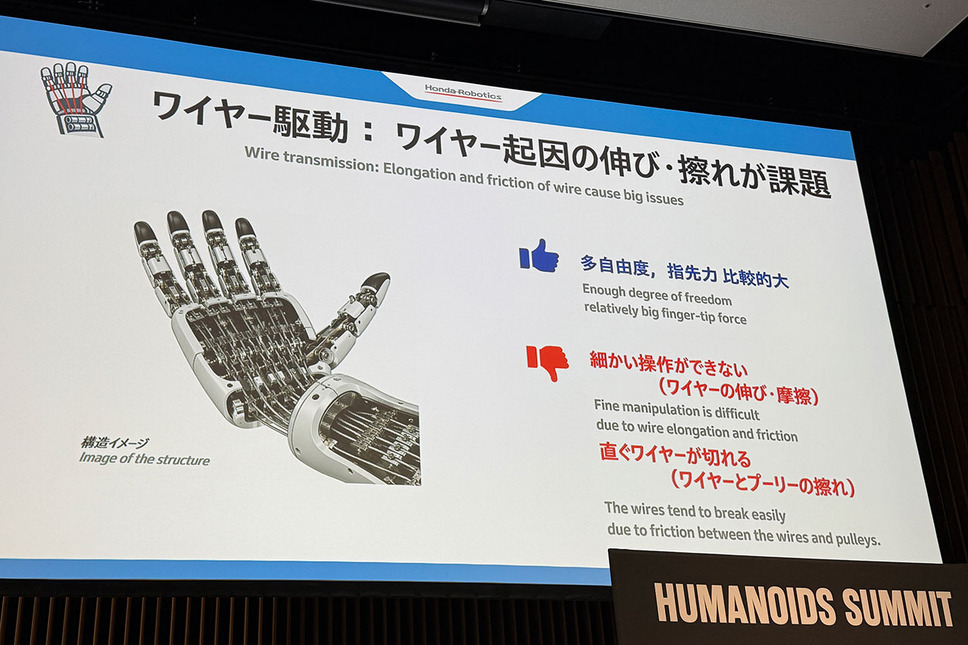
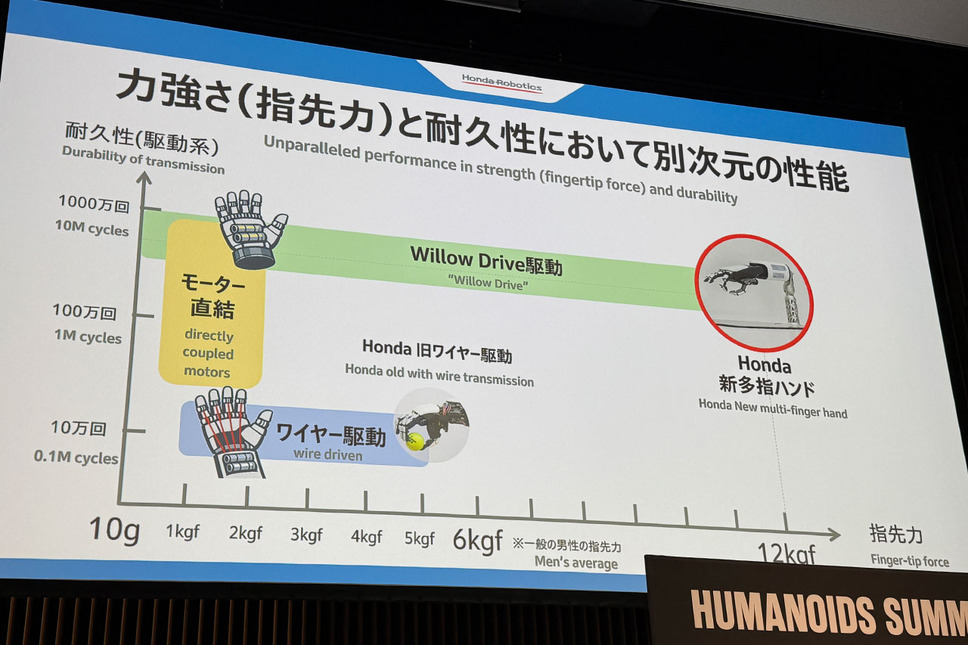
吉池氏は、現在主流となっている多指ハンドには大きく2種類あると説明した。「モータ直結型」と「ワイヤ駆動型」だが、いずれも一長一短、課題がある。
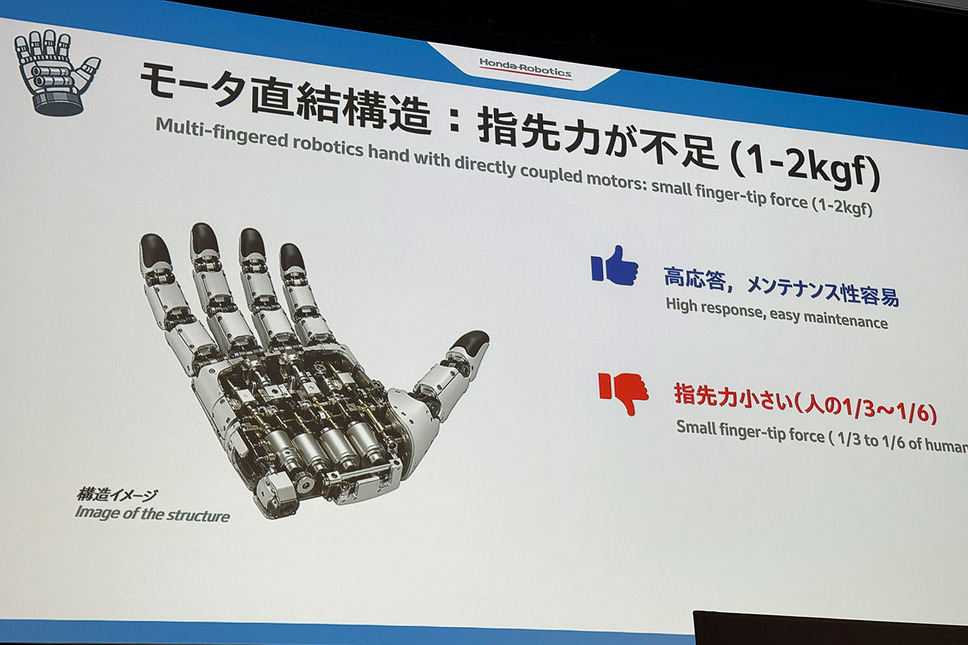
モータ直結型はモータを手の内部に搭載するため応答性や保守性には優れるが、搭載スペースの制約が大きく、指先力が不足しやすい。実際、市場に存在する多くの多指ハンドは指先力が1~2kgf程度に留まるという。
一方で、ワイヤ駆動型はモータを前腕部に配置できるため比較的大きな力を出せる。しかしワイヤの伸びや摩擦による制御精度の低下、さらにはワイヤ切断による耐久性の課題がある。
吉池氏は、こうした課題から「デモンストレーションはできても、製造現場で継続運用するにはまだ壁がある」と説明した。
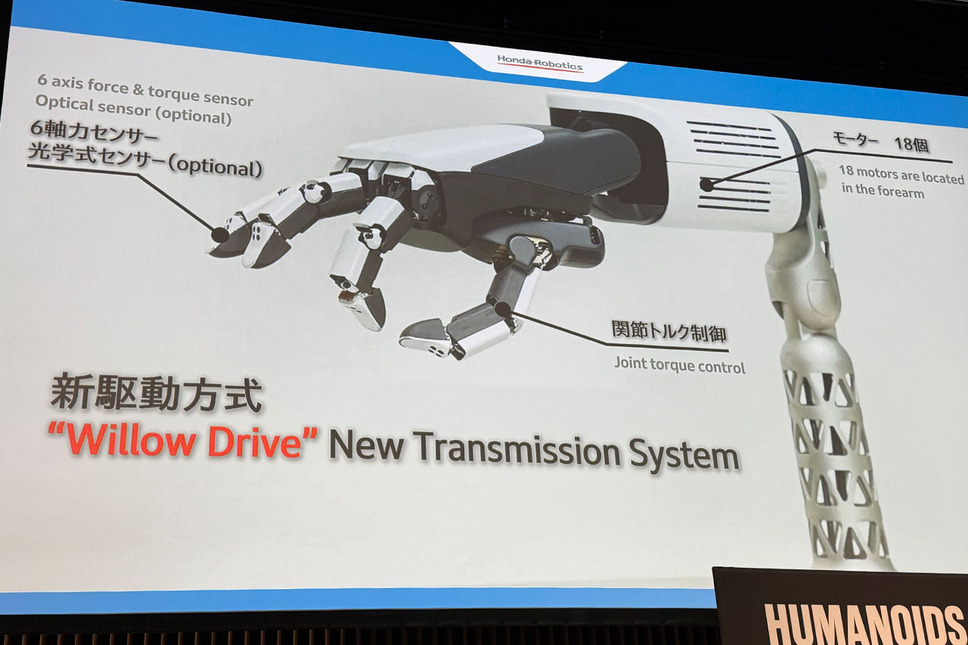
■Hondaが開発した新方式「Willow Drive」
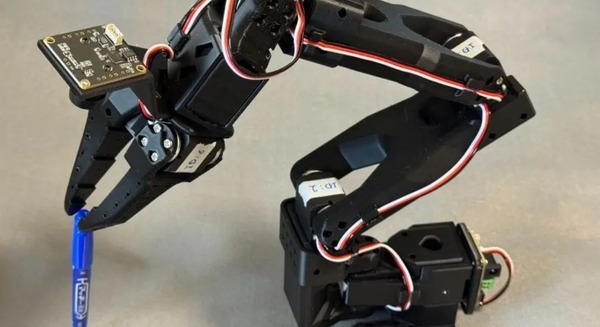
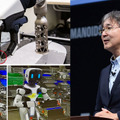
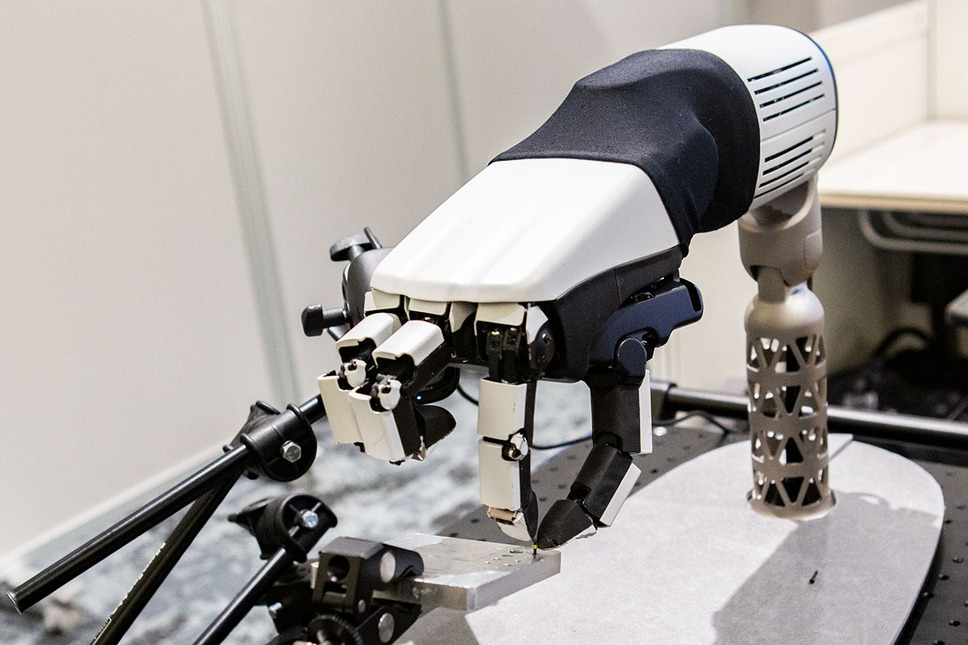
こうした課題を解決するためHondaが開発したのが、新しい駆動方式「Willow Drive」だ。モータは前腕部に配置しながら、独自機構によって指を駆動する。
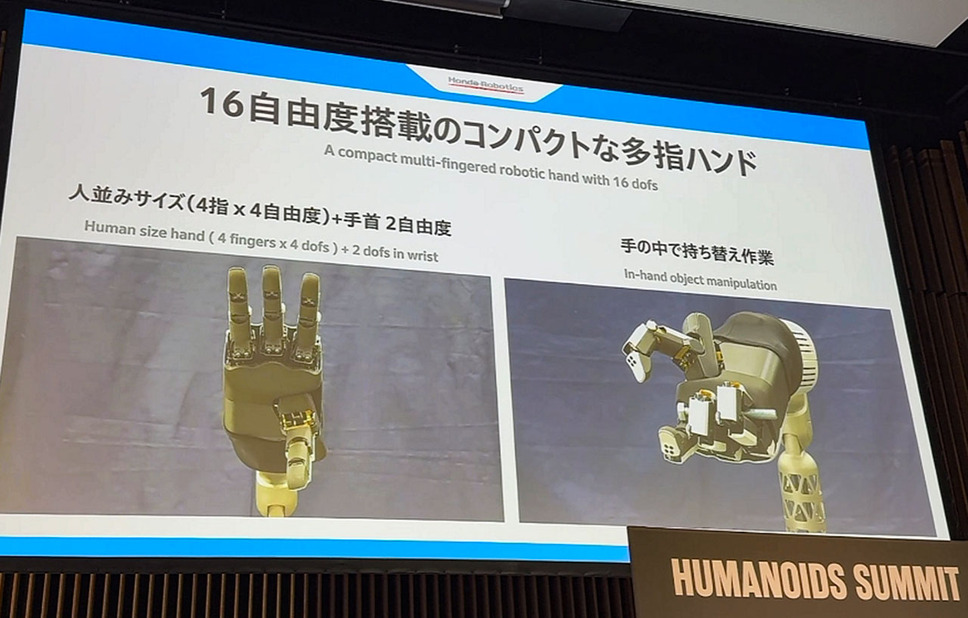
新型ハンドは18個のモータを搭載し、人間サイズの手に20自由度を実装した。
さらに、
・関節トルク制御
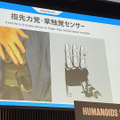
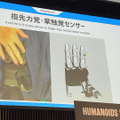
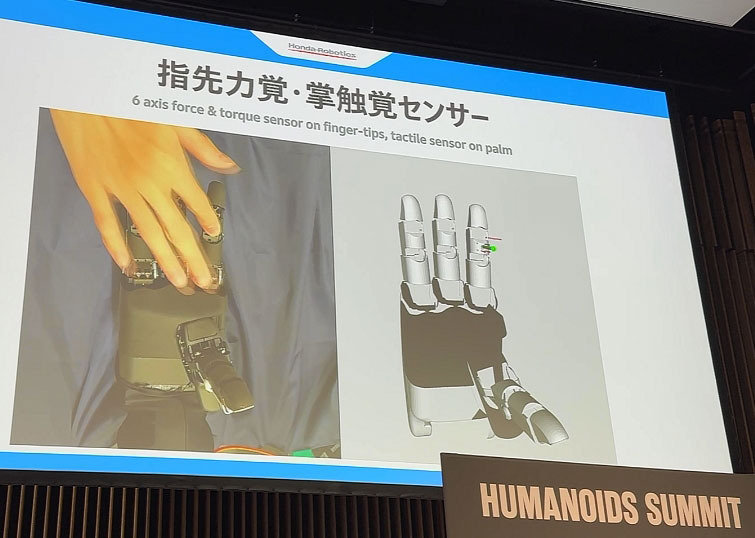
・6軸力覚センサー
・分布型「触覚」センサー
・光学式センサー(オプション)
を備える。
これにより、複雑な形状の部品を把持しながら精密作業を行うことができる。
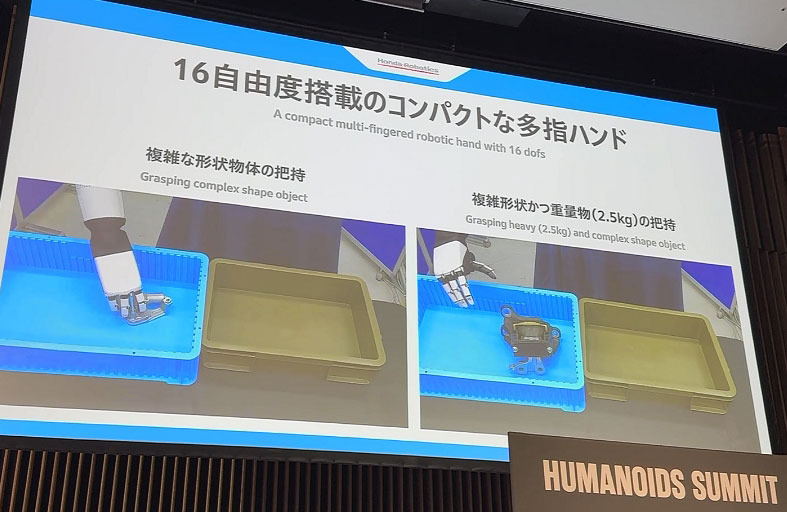
■人間の2倍に達する指先力
また、注目を集めたのは指先力だ。Hondaの新型多指ハンドは最大12kgfの指先力を発揮できる。講演では約5kgの金属部品を安定して把持するデモ映像も紹介された。一般的な男性の指先力がおよそ6kgfとされることから、新型多指ハンドは人間の約2倍に相当する指先力を実現している。
また、力が強いだけではない。M1.6サイズの小ネジの操作や、針穴への糸通しといった極めて繊細な作業も実演された。
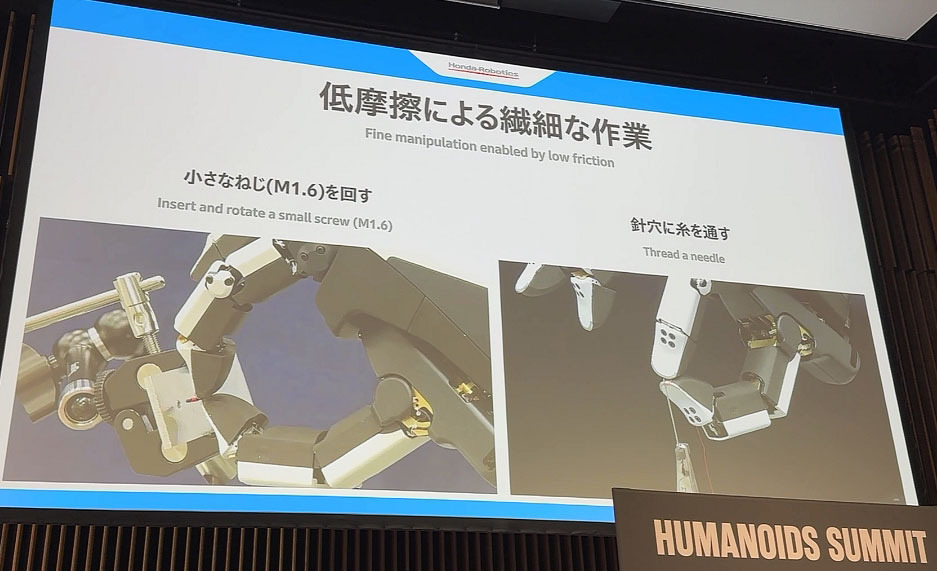
力強さと繊細さを両立した点こそ、このハンドの最大の特徴だ。
■フィジカルAIと組み合わせてスキルを自動獲得
講演後半ではフィジカルAIとの連携についても触れられた。
Hondaは現在、
・大規模並列強化学習
・Vision-Languageモデル
・自律学習
を組み合わせ、ロボットが作業スキルを自動獲得する研究を進めているという。
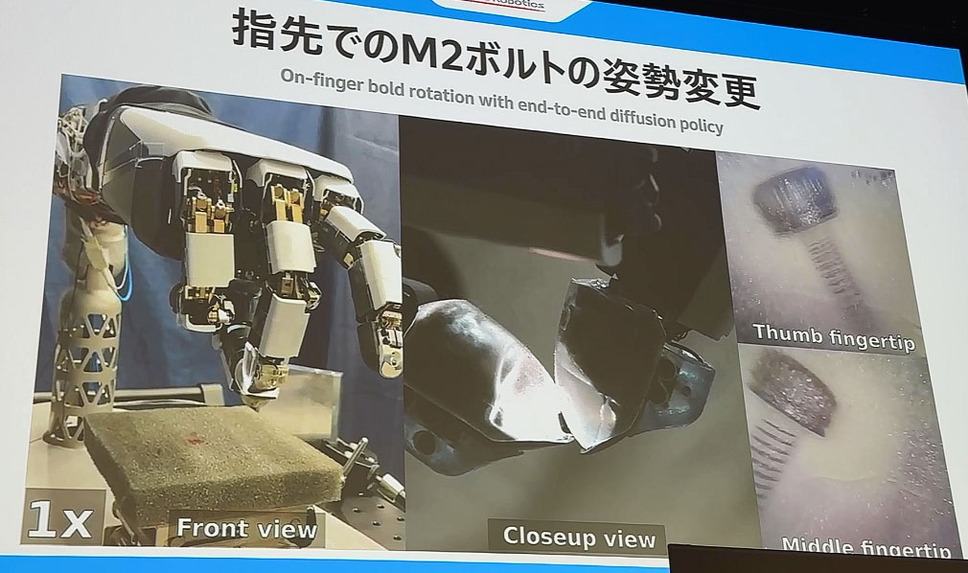
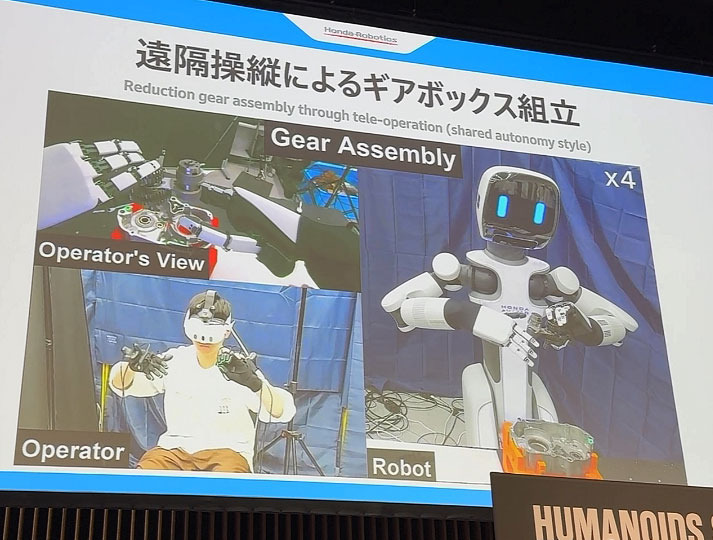
例えばボルトをつまみ上げ、手の中で回転させながら挿入方向へ姿勢を整える作業なども、学習によって獲得できるようになりつつある。
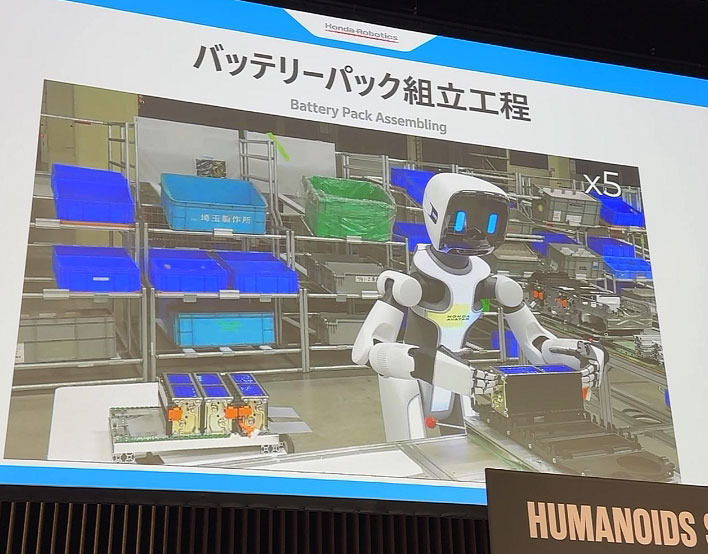
さらに自動車部品のピッキングやバッテリーパックの組立工程など、実際の製造ラインを想定した検証もすでに始まっているという。
■「最後のピース」に挑むHonda
ヒューマノイド開発では、歩行やAIが注目を集めがちだ。しかし実際に工場や物流現場で価値を生み出すためには、人間と同等以上の器用さを持つ「手」が不可欠になる。
そして実際に、ヒューマノイドの競争は歩行性能から作業性能へ移りつつあり、製造業向けヒューマノイドの成否は手の性能にかかっている。
今回Hondaが示したのは、まさにその「最後のピース」への挑戦といえるだろう。
新型多指ハンドは、人間並みの自由度と精密性、人間を超える指先力、そして製造現場で求められる耐久性を兼ね備えることで、ヒューマノイドの社会実装を一歩前へ進める可能性を示した。
フィジカルAIの進化と組み合わせることで、Hondaの新型多指ハンドは今後の製造業自動化の重要な基盤技術のひとつになるかもしれない。
インタビュー記事に続く「【インタビュー】ASIMOから続くHondaのロボット研究 人間超えの指先力を持つ新型多指ハンドの狙いを吉池氏に聞く」