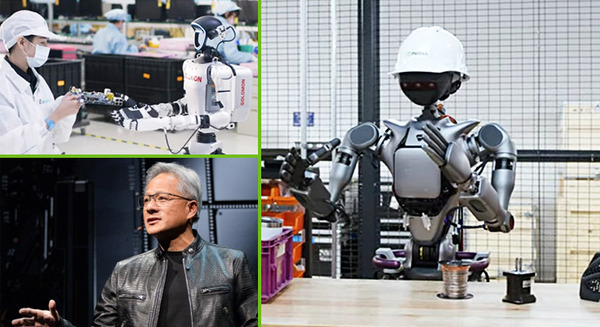
NVIDIAは2026年5月31日、ロボティクス研究向けに設計された初のオープン型ヒューマノイドロボット参照設計「NVIDIA Isaac GR00T Reference Humanoid Robot」を発表した。
本プラットフォームは、Unitree Robotics製の二足歩行ロボット「H2」、Sharpa Wave製の5本指ハンド、オンボードコンピュータとして「NVIDIA Jetson Thor」(ジェットソン ソー)、そしてオープンソースソフトウェアとAIモデル群「NVIDIA Isaac GR00T」(ジーフアールティーゼロゼロフィー:略語はグルート)を組み合わせた統合システムだ。データ収集からモデルのデプロイまでをカバーするフルスタックのプラットフォームを研究者に提供することを目的としている。
ヒューマノイドロボットの研究開発においては、これまでシミュレーター、テレオペレーション、データパイプライン、インフラ構築をゼロから行う必要があり、研究者の大きな負担となっていた。NVIDIAはこの課題を解決するため、開発の各フェーズを統合したオープンプラットフォームを整備した。研究チームはロボットの動作研究に集中できる環境を手に入れられる。

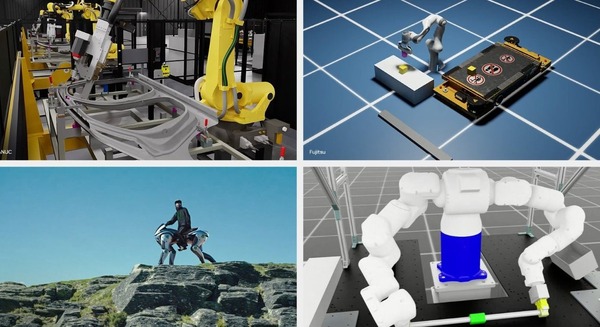
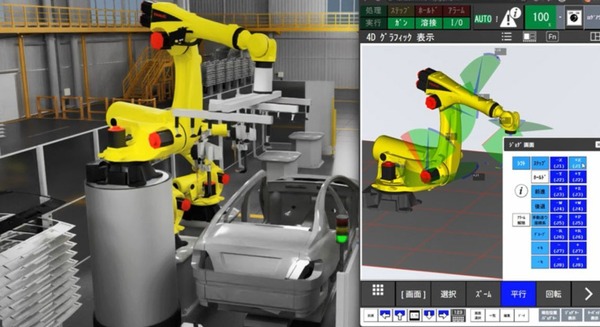
プラットフォームの中核を担うのが「NVIDIA Isaac Lab」によるシミュレーション環境だ。NVIDIA OmniverseやNVIDIA Cosmos世界モデルと連携し、リアルな物理シミュレーションのなかでロボットの行動データを大量に生成・学習させることができる。

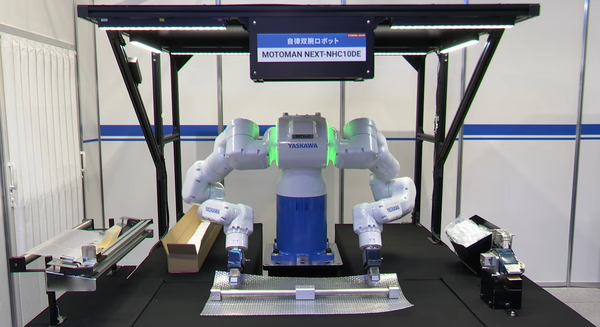
シミュレーションで学習したモデルは、GR00T 1.7とIsaac ROSを通じて実機ロボットへとシームレスに転用可能。実際の作業環境においてロボットが工具や部品を扱うタスクにも対応しており、シミュレーションと実世界の間のギャップを埋める技術が組み込まれている。

Isaac Simでは、倉庫や製造ラインを模した環境でさまざまなヒューマノイドロボットが協調動作するシナリオも検証できる。

まとめ
「Isaac GR00T」はメーカーや機種を超えた汎用的なロボット開発基盤として位置づけられている。
NVIDIAが本プラットフォームとリファレンスモデルをオープンに提供することで、ヒューマノイドロボットの研究から実用化まで、世界中の開発を加速することが期待できる。