
全日本空輸株式会社(以下、全日空)は、Pepper World 2017のセミナーセッションで、空港で自走するPepperの動画を公開しました。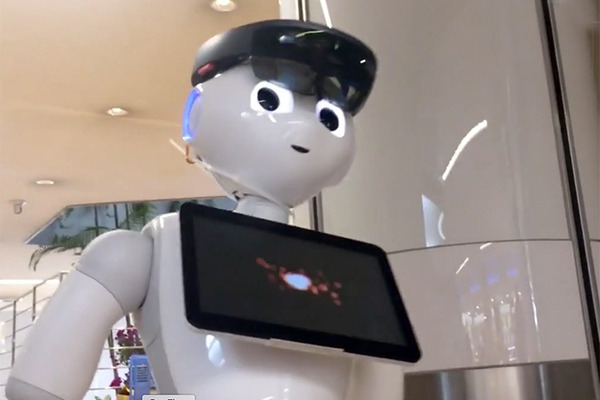
それはPepperをよく知っている人ほど衝撃的に写る光景だったと思います。
周囲に人がたくさんいるにも関わらず、Pepperが空港の中を自走していく姿だからです。しかも、PepperはMicrosoftのホロレンズをかけています。こ、これはいったい・・・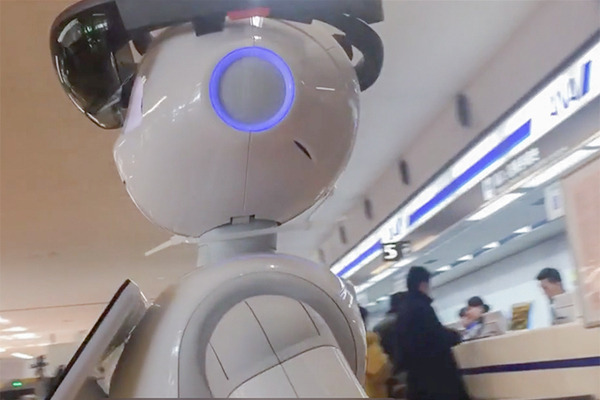
このPepperは完全に自走しています。
航空会社が空港を運営しているわけではないので、全日空が空港内にロボットを誘導するビーコン等を設置することは簡単にはできません。Pepperを遠隔操作しているわけでもありません。全日空はWi-Fiも使わず、学習しながらPepperが自律的に移動する技術を開発したのです。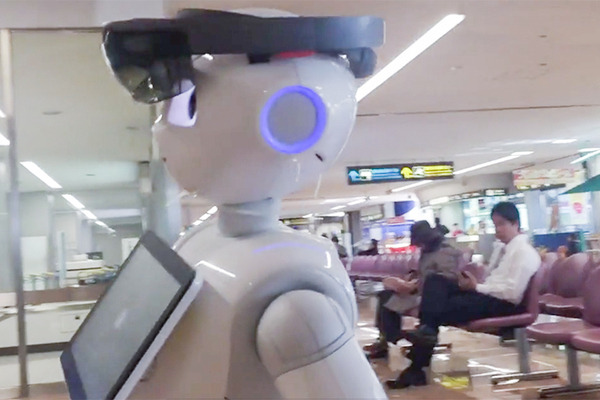
テスト版のシステムなので映像には搭載されていませんでしたが、実際の実証実験では音楽を鳴らして、周囲に発話で注意喚起をしながらPepperは空港内を移動する予定です。
Pepper Worldのセッションで動画を本邦初公開
Pepper Worldの初日、「インバウンド需要をPepperで取り込む新たな試み」というセッションに同社のデジタル・デザイン・ラボ の野村泰一氏が登壇し、空港で活用してきたPepperの取り組みを紹介しました。
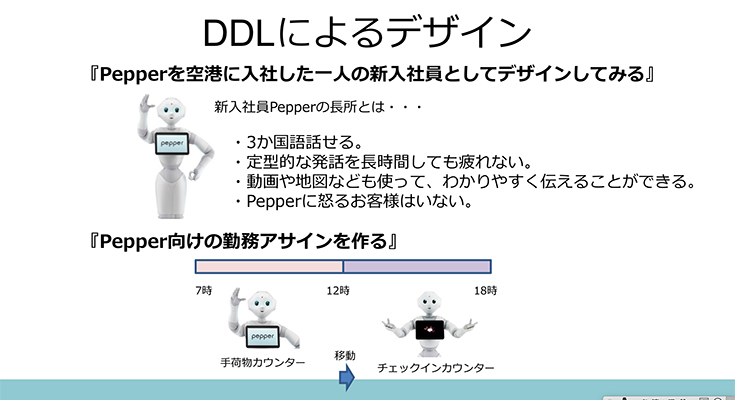
主に受付カウンター等で搭乗や荷物に関する情報を告知する役割で導入をはじめ、「人とPepperのいい関係」を目指して、役に立つロボットとして開発を進めてきました。

そして、2/15から宮崎空港において行われる新たな実証実験が「自走」するPepperとなります。
開発は新日鉄住金ソリューションズ(NSSOL)と連携して行われました。
NSSOLは以前も取材しましたが、自走するPepperの知見を既に持っています。しかし、それはROSを使ったものでしたが、今回のシステムはMicrosoftのホロレンズを使用しています。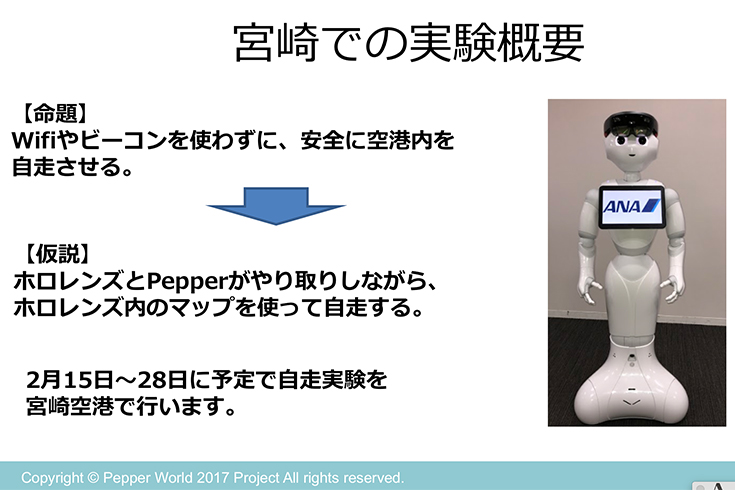
早速、この開発に携わった全日空の野村氏とANAシステムズの和田氏に話しを聞きました。
ホロレンズ×Pepperが自走するしくみ
神崎(編集部)
共同で開発したNSSOLさんはROSを使ってPepperが自走するシステムを持っていましたが、なぜ全日空さんはホロレンズを使うことにしたのでしょうか。
野村(敬称略)
無理難題を言いました(笑)。NSSOLさんが既に持っている技術を使わずに、空港なので長い距離で、なおかつ周囲に人がたくさんいるオープンスペース環境でPepperを動かしたい、という相談をしました。
神崎
その結果、たどり着いた最適な答えがホロレンズだったのですね。Pepperとホロレンズが通信して自走しているんですか
和田
そうです。マッピングと現在地点の把握はホロレンズの単体で行います。現地点から移動するトリガーはPepperが出しています。
神崎
自走するのにホロレンズのMRは使っているんですか?
野村
ホロレンズのMR映像を移動中のPepperは見ていません。Pepperに詳しい人なら解りますが、Pepperの目(カメラ)は額とクチについているので、人間のようにホロレンズをかけても映像を見ることはできないからです。ただ、このようにホロレンズをかけて歩いているPepperの姿は未来的だし、ある意味で衝撃的で、なにより面白いですよね(笑)

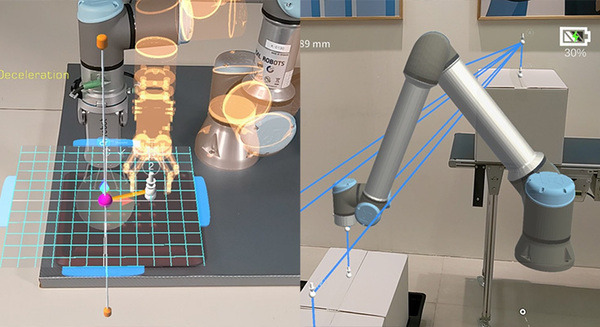
ホロレンズ×Pepperの自走システムのしくみはこうです。
まず、エンジニアがホロレンズを装着して空港内を歩いてマッピング(地図の作成)します。このときにMR機能を活用し、実際の空港の通路を見ながら、ホロレンズを指で操作して、障害物や壁、注意点などを入力していきます。全体の地図が完成したら、ロボットが歩行するルートや到着地点を指定します。これでPepperが移動すべきルートと到達地点が決まります。
実際に移動する際はPepperが標準で装備しているセンサー類を活用し、現時点と周囲のマップをホロレンズが認識しながら進みます。更に学習もしています。
空港なので、観葉植物や備品など、障害物の位置は日々変わるのでマップ情報は常時アップデートします。また空港利用者が周囲を歩きますので、常にリアルタイムの状況を認識して進む必要があります。進路や目の前に人がいることを感知すれば避けたり止まります。それらの作業をPepperのセンサーとホロレンズのシステムが連携して行っています。
Pepperの自走移動が必要と感じた理由
Pepperは乗客へのアナウンス業務が主ですが、既に様々な場所で仕事をこなしています。それらの業務は時間帯によって変わるのでPepperを移動して配置変えを行う必要があります。
その都度、スタッフがPepperを移動していますが、Pepperの移動中に転倒してPepperが壊れたり、スタッフが怪我をする恐れがあるため、むしろPepperが安全を確認しながら自走した方が転倒やぶつかる事故の確率は低くなると考えたと言います。
ロボットの導入で最も大切なことは現場の声に耳を傾けること
神崎
ロボットが役立つかそうでないかの評価はどのように行っていますか
野村
例えば、受付に人が並んで列ができているという課題があるとします。解決するのにPepperが面白いことを言って体感待ち時間を短くしようという考え方があります。これはこれで一つの回答ではありますが、本当の課題解決は、受付の処理を早くして並んでいる列を短くすることです。
受付に時間がかかる理由のひとつが乗客の方が各自でカバンのクチを閉めていないことに起因しているとします。Pepperが前もって「必ずカバンは閉めてから出して下さい~」と呼びかけを行い、それを聞いてカバンを開けたまま出すお客様がいなくなり、結果的に列が短くなれば、それはひとつのアサインをロボットが確実に代替したと評価することができます。その部分ではPepperはサイネージとは違って人の関心を引く大きな力を持っています。
Pepperを導入する際に最も重要なことは、それぞれの現場の声を聞くことだと言います。空港によって、環境もスタッフも業務も異なるからです。すべての空港に足を運び、そこで働く人たちとコミュニケーションして初めて、ロボットが行う業務の最適なシステム化の解が得られるとのことでした。
和田
私達は人ができてないところとロボットができないところをお互いにカバーしながら協働していくことを目指しています。開発したシステムやロボットができるようになった分だけ自分たちの仕事が奪われるという風潮にならないように配慮しながら進めています。
野村
今後はPepperが「動く」ことで新しくできる業務が増えていくと思います。「移動する」ことについては、今回の開発で技術的や機能的には可能だということが証明できたと思っています。今後も業務サイドや現場のスタッフとの協働を意識しながら知見を蓄積したり、活用していく範囲を検討していきたいと思っています。
実証実験の開始が発表されるのは2月15日。
全日空のホロレンズ×Pepperがいよいよ宮崎空港で自走して歩き出します。